出球机器人的制作方法
1.本实用新型涉及出球机器人技术领域,具体为出球机器人。
背景技术:
2.在正规足球比赛中需要22个球童来帮助球员处理出界球;一次发球记为5 秒,据统计一场正式比赛平均会有40次出界,就会浪费约3分钟时间,这样既需要很多人力又会浪费时间,在球员们的日常训练中射门是必不可少的,然而工作人员摆球会需要很多时间,便会造成球员等工作人员摆球的尴尬局面,而我们制作的这款出球机器同时解决了这两个问题,使足球比赛和射门训练变得更加顺畅。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本实用新型提供了出球机器人,具备方便发球节约时间的优点,解决了上述中的问题。
5.(二)技术方案
6.为实现上述方便发球节约时间的目的,本实用新型提供如下技术方案:出球机器人,包括四驱机器人,所述四驱机器人的顶部固定安装有底板,所述底板顶部的右侧固定安装有储球箱,所述储球箱的左侧开设有出口,所述出口的内部固定安装有斜坡板,所述储球箱的左侧镶嵌有第一舵机,所述第一舵机的输出轴固定连接有连接板,所述连接板的底部固定连接有遮挡板,所述底板顶部的左侧固定安装有梯形板,所述梯形板的正面镶嵌有第二舵机,所述第二舵机的输出轴固定安装有页板。
7.优选的,所述第一舵机位于出口的上方。
8.优选的,所述遮挡板的宽度大于出口的宽度。
9.优选的,所述第一舵机与第二舵机的输入端均与微控制器的输出端信号连接。
10.优选的,所述微控制器的输入端与无线模块的输出端信号连接。
11.优选的,所述无线模块的输入端与手柄的输出端信号连接。
12.优选的,所述微控制器的输出端与四驱机器人的减速电机信号连接。
13.(三)有益效果
14.与现有技术相比,本实用新型提供了出球机器人,具备以下有益效果:
15.该出球机器人,预先将球体放入储球箱中,通过手柄控制,通过无线模块将信号传递至微控制器上,微控制器根据信号分别控制第一舵机和第二舵机的运行,或控制四驱机器人的减速电机来让四驱机器人进行行走,第一舵机通过连接板带着遮挡板旋转,球体既可以从储球箱中漏出至两个梯形板之间,通过第二舵机控制页板转动,当页板不在阻碍球体时,球体顺着斜坡板从四驱机器人上滚下来,从而实现对球体的排出进行控制。
附图说明
16.图1为本实用新型正面结构示意图;
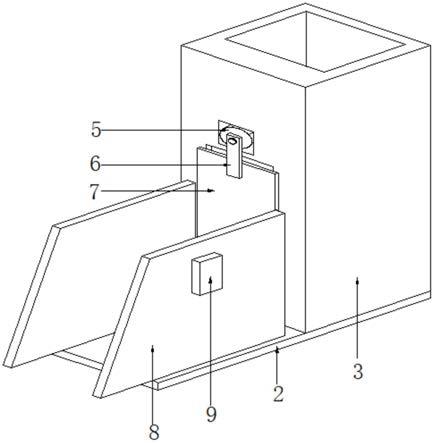
17.图2为本实用新型立体结构示意图;
18.图3为本实用新型储球箱立体结构示意图;
19.图4为本实用新型第二舵机与页板的侧视示意图;
20.图5为本实用新型控制原理图。
21.图中:1-四驱机器人、2-底板、3-储球箱、4-出口、5-第一舵机、6-连接板、7-遮挡板、8-梯形板、9-第二舵机、10-页板、11-斜坡板。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1-5,出球机器人,包括四驱机器人,通过四个减速电机控制,减速电机通过电机驱动来驱动,整个机器人通过微控制器进行控制,机器人运动具有前后左右四个方向和摆动操作,摆动操作目的是为了在球卡住时将球顺利送入出球口,其中四驱机器人的顶部固定安装有底板1,其中底板1 顶部的右侧固定安装有储球箱3,其中储球箱3的左侧开设有出口4,其中出口4的内部固定安装有斜坡板11,其中储球箱3的左侧镶嵌有第一舵机5,其中第一舵机5位于出口4的上方,其中第一舵机5的输出轴固定连接有连接板6,其中连接板6的底部固定连接有遮挡板7,其中遮挡板7的宽度大于出口4的宽度,其中底板1顶部的左侧固定安装有梯形板8,其中梯形板8的正面镶嵌有第二舵机9,其中第二舵机9的输出轴固定安装有页板10,第一舵机5控制遮挡板7,第二舵机9控制页板10,这样就会具有三种控制模式,自动出球模式,遮挡板7与页板10可以依照顺序打开,确保只有一个球落下;手动模式,遮挡板7与页板10都可以单独进行控制开和关;打开模式,在球卡住或者意外情况时将遮挡板7与页板10同时打开。
24.其中第一舵机5与第二舵机9的输入端均与微控制器的输出端信号连接,其中微控制器的输入端与无线模块的输出端信号连接,其中无线模块的输入端与手柄的输出端信号连接,无线模块安装在手柄的内部,操作者可以远程操作,其中微控制器的输出端与四驱机器人的减速电机信号连接,微控制器安装在四驱机器人的内部。
25.在使用时,预先将球体放入储球箱3中,通过手柄控制,通过无线模块将信号传递至微控制器上,微控制器根据信号分别控制第一舵机5和第二舵机9的运行,或控制四驱机器人的减速电机来让四驱机器人进行行走,第一舵机5通过连接板6带着遮挡板7旋转,球体既可以从储球箱3中漏出至两个梯形板8之间,通过第二舵机9控制页板10转动,当页板10不在阻碍球体时,球体顺着斜坡板11从四驱机器人上滚下来,从而实现对球体的排出进行控制。
26.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.出球机器人,包括四驱机器人,其特征在于:所述四驱机器人的顶部固定安装有底板(1),所述底板(1)顶部的右侧固定安装有储球箱(3),所述储球箱(3)的左侧开设有出口(4),所述出口(4)的内部固定安装有斜坡板(11),所述储球箱(3)的左侧镶嵌有第一舵机(5),所述第一舵机(5)的输出轴固定连接有连接板(6),所述连接板(6)的底部固定连接有遮挡板(7),所述底板(1)顶部的左侧固定安装有梯形板(8),所述梯形板(8)的正面镶嵌有第二舵机(9),所述第二舵机(9)的输出轴固定安装有页板(10)。2.根据权利要求1所述的出球机器人,其特征在于:所述第一舵机(5)位于出口(4)的上方。3.根据权利要求1所述的出球机器人,其特征在于:所述遮挡板(7)的宽度大于出口(4)的宽度。4.根据权利要求1所述的出球机器人,其特征在于:所述第一舵机(5)与第二舵机(9)的输入端均与微控制器的输出端信号连接。5.根据权利要求4所述的出球机器人,其特征在于:所述微控制器的输入端与无线模块的输出端信号连接。6.根据权利要求5所述的出球机器人,其特征在于:所述无线模块的输入端与手柄的输出端信号连接。7.根据权利要求4所述的出球机器人,其特征在于:所述微控制器的输出端与四驱机器人的减速电机信号连接。
技术总结
本实用新型涉及出球机器人技术领域,且公开了出球机器人,包括四驱机器人,所述四驱机器人的顶部固定安装有底板,所述底板顶部的右侧固定安装有储球箱,所述储球箱的左侧开设有出口,所述出口的内部固定安装有斜坡板,所述储球箱的左侧镶嵌有第一舵机,通过手柄控制,通过无线模块将信号传递至微控制器上,微控制器根据信号分别控制第一舵机和第二舵机的运行,或控制四驱机器人的减速电机来让四驱机器人进行行走,第一舵机通过连接板带着遮挡板旋转,球体既可以从储球箱中漏出至两个梯形板之间,通过第二舵机控制页板转动,当页板不在阻碍球体时,球体顺着斜坡板从四驱机器人上滚下来,从而实现对球体的排出进行控制。从而实现对球体的排出进行控制。从而实现对球体的排出进行控制。
技术研发人员:张家康
受保护的技术使用者:张家康
技术研发日:2021.06.29
技术公布日:2022/1/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1