一种网球自动收集机器人
1.本实用新型涉及网球收集技术领域,具体是一种网球自动收集机器人。
背景技术:
2.在进行网球的击球训练时,地面往往会散落有很多的网球,需要进行收集。常用的收集方法是人工一个一个进行拾取,浪费时间,人长时间弯腰,比较劳累,使用装置进行收集时也不方便,球不容易进入到装置内,且不能对球进行限位导向,比较麻烦。针对这种情况,本领域技术人员提供了一种网球自动收集机器人。
技术实现要素:
3.本实用新型的目的在于提供一种网球自动收集机器人,以解决上述背景技术中提出的球不容易进入到装置内、不能对球进行导向的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种网球自动收集机器人,包括装置主体,所述装置主体的内部设置有传输组件,装置主体的一侧设置有斜架,斜架上设置有旋转组件和调节组件。
6.所述传输组件包括进球口,进球口设置在装置主体的一侧,进球口的顶部贯通设置有轨道,进球口的底部贯通设置有内腔,内腔内设置有转筒,且转筒上固定插接有转轴,转轴与装置主体的两侧通过轴承连接,且转轴一端固定安装有电机,转筒的侧面设置有多个固定板。
7.作为本实用新型再进一步的方案:所述装置主体内插设有收集箱,且收集箱的一侧边沿低于轨道的底部内壁。
8.作为本实用新型再进一步的方案:所述旋转组件包括两个转盘,两个转盘设置在斜架上方,且转盘的侧面设置有多个推爪,转盘的底部固定安装有转块,转块通过轴承与斜架转动连接,两个转块的底部边沿通过环形齿与齿轮啮接,齿轮通过轴与伺服电机的输出端固定连接。
9.作为本实用新型再进一步的方案:所述调节组件包括调节板,调节板设置有两个,且两个调节板内插接有竖杆,竖杆竖直固定安装在斜架内,调节板的一端铰接有连杆,连杆的一端铰接有圆环,圆环通过螺纹安装有螺纹杆,且螺纹杆通过轴承与斜架的一侧转动连接。
10.作为本实用新型再进一步的方案:所述装置主体的底部对称设置有四个滚轮,且滚轮设置在装置主体的拐角处。
11.作为本实用新型再进一步的方案:所述装置主体的一侧固定安装有两个伸缩杆,且两个伸缩杆的顶部共同固定安装有握杆,且握杆上设置有橡胶套。
12.作为本实用新型再进一步的方案:所述斜架的顶部与进球口的边缘接触,且斜架的下表面低于装置主体的下表面。
13.与现有技术相比,本实用新型的有益效果是:
14.1、转动螺纹杆可带动圆环移动,连杆与圆环和调节板铰接,可调节调节板的角度,方便收集,启动伺服电机通过齿轮带动两个转块转动,可对球提供一个沿着斜架斜面的力,方便球进入到机器人内部;
15.2、球进入进球口后会向内腔内下落,转筒以一定的速度转动,固定板可将球击起,竖直向上运动,沿着轨道可进入收集箱内进行收集,内腔内可容纳球,防止卡住。
附图说明
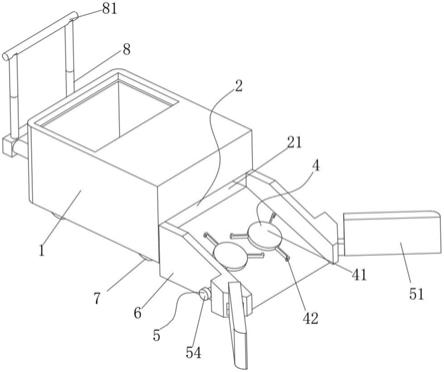
16.图1为本实用新型的整体结构立体示意图;
17.图2为本实用新型的传输组件正视剖面结构示意图;
18.图3为本实用新型的旋转组件剖面结构示意图;
19.图4为本实用新型的调节组件俯视剖面结构示意图。
20.图中:1、装置主体;2、传输组件;3、收集箱;4、旋转组件;5、调节组件;6、斜架;7、滚轮;8、伸缩杆;21、进球口;22、轨道;23、转筒;24、固定板;25、内腔;41、转盘;42、推爪;43、转块;44、齿轮;45、伺服电机;51、调节板;52、竖杆;53、连杆;54、螺纹杆;55、圆环;81、握杆。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,请参阅图1~4,本实用新型实施例如下:
22.一种网球自动收集机器人,包括装置主体1,装置主体1的内部设置有传输组件2,装置主体1的一侧设置有斜架6,斜架6上设置有旋转组件4和调节组件5。
23.传输组件2包括进球口21,进球口21设置在装置主体1的一侧,进球口21的顶部贯通设置有轨道22,进球口21的底部贯通设置有内腔25,内腔25内设置有转筒23,且转筒23上固定插接有转轴,转轴与装置主体1的两侧通过轴承连接,且转轴一端固定安装有电机,转筒23的侧面设置有多个固定板24。
24.在图1中:装置主体1内插设有收集箱3,且收集箱3的一侧边沿低于轨道22的底部内壁,方便对球进行收集;装置主体1的底部对称设置有四个滚轮7,且滚轮7设置在装置主体1的拐角处,方便移动;装置主体1的一侧固定安装有两个伸缩杆8,且两个伸缩杆8的顶部共同固定安装有握杆81,且握杆81上设置有橡胶套,方便手持;斜架6的顶部与进球口21的边缘接触,且斜架6的下表面低于装置主体1的下表面,使得斜架6尽可能贴近地面。
25.在图1和图3中:旋转组件4包括两个转盘41,两个转盘41设置在斜架6上方,且转盘41的侧面设置有多个推爪42,转盘41的底部固定安装有转块43,转块43通过轴承与斜架6转动连接,两个转块43的底部边沿通过环形齿与齿轮44啮接,齿轮44通过轴与伺服电机45的输出端固定连接,可将球向上推。
26.在图1和图4中:调节组件5包括调节板51,调节板51设置有两个,且两个调节板51内插接有竖杆52,竖杆52竖直固定安装在斜架6内,调节板51的一端铰接有连杆53,连杆53的一端铰接有圆环55,圆环55通过螺纹安装有螺纹杆54,且螺纹杆54通过轴承与斜架6的一侧转动连接,可调节调节板51的角度,方便对球进行导向。
27.本实用新型的工作原理是:转动螺纹杆54可带动圆环55移动,连杆53与圆环55和调节板51铰接,可调节调节板51的角度,方便收集,启动伺服电机45通过齿轮44带动两个转
块43转动,转盘41上的推爪42可实现同步运动,可对球提供一个沿着斜架6斜面的力,球进入进球口21后会向内腔25内下落,转筒23以一定的速度转动,固定板24可将球击起,竖直向上运动,沿着轨道22可进入收集箱3内进行收集,内腔25内可容纳球,防止卡住,伸缩杆8可伸缩,方便手持握杆81移动该装备。
28.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种网球自动收集机器人,包括装置主体(1),其特征在于,所述装置主体(1)的内部设置有传输组件(2),装置主体(1)的一侧设置有斜架(6),斜架(6)上设置有旋转组件(4)和调节组件(5);所述传输组件(2)包括进球口(21),进球口(21)设置在装置主体(1)的一侧,进球口(21)的顶部贯通设置有轨道(22),进球口(21)的底部贯通设置有内腔(25),内腔(25)内设置有转筒(23),且转筒(23)上固定插接有转轴,转轴与装置主体(1)的两侧通过轴承连接,且转轴一端固定安装有电机,转筒(23)的侧面设置有多个固定板(24)。2.根据权利要求1所述的一种网球自动收集机器人,其特征在于,所述装置主体(1)内插设有收集箱(3),且收集箱(3)的一侧边沿低于轨道(22)的底部内壁。3.根据权利要求1所述的一种网球自动收集机器人,其特征在于,所述旋转组件(4)包括两个转盘(41),两个转盘(41)设置在斜架(6)上方,且转盘(41)的侧面设置有多个推爪(42),转盘(41)的底部固定安装有转块(43),转块(43)通过轴承与斜架(6)转动连接,两个转块(43)的底部边沿通过环形齿与齿轮(44)啮接,齿轮(44)通过轴与伺服电机(45)的输出端固定连接。4.根据权利要求1所述的一种网球自动收集机器人,其特征在于,所述调节组件(5)包括调节板(51),调节板(51)设置有两个,且两个调节板(51)内插接有竖杆(52),竖杆(52)竖直固定安装在斜架(6)内,调节板(51)的一端铰接有连杆(53),连杆(53)的一端铰接有圆环(55),圆环(55)通过螺纹安装有螺纹杆(54),且螺纹杆(54)通过轴承与斜架(6)的一侧转动连接。5.根据权利要求1所述的一种网球自动收集机器人,其特征在于,所述装置主体(1)的底部对称设置有四个滚轮(7),且滚轮(7)设置在装置主体(1)的拐角处。6.根据权利要求1所述的一种网球自动收集机器人,其特征在于,所述装置主体(1)的一侧固定安装有两个伸缩杆(8),且两个伸缩杆(8)的顶部共同固定安装有握杆(81),且握杆(81)上设置有橡胶套。7.根据权利要求1所述的一种网球自动收集机器人,其特征在于,所述斜架(6)的顶部与进球口(21)的边缘接触,且斜架(6)的下表面低于装置主体(1)的下表面。
技术总结
本实用新型公开了一种网球自动收集机器人,涉及网球收集技术领域,使用装置进行收集网球时也不方便,球不容易进入到装置内,且不能对球进行限位导向,比较麻烦,包括装置主体,所述装置主体的内部设置有传输组件,装置主体的一侧设置有斜架,斜架上设置有旋转组件和调节组件,转动螺纹杆可带动圆环移动,连杆与圆环和调节板铰接,可调节调节板的角度,方便收集,启动伺服电机通过齿轮带动两个转块转动,可对球提供一个沿着斜架斜面的力,方便球进入到机器人内部,球进入进球口后会向内腔内下落,转筒以一定的速度转动,固定板可将球击起,竖直向上运动,沿着轨道可进入收集箱内进行收集,内腔内可容纳球,防止卡住。防止卡住。防止卡住。
技术研发人员:王爽 袁浩 王治媛 马鹏 张婧怡
受保护的技术使用者:浙江工商大学
技术研发日:2021.11.08
技术公布日:2022/4/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1