基于真空泵的清洁机器人的制作方法
1.本实用新型涉及气动设备领域,尤其涉及一种基于真空泵的清洁机器人。
背景技术:
2.现在的清洁机器人上需要用到抽真空的设备,目前使用的的较多的抽真空设备是空压机,但是使用空压机抽真空会产生的较大的震颤,所以采用空压机抽真空会导致装置的工作稳定性较差,且实际运营中,空压机因为自身重量,不可能集成到清洁设备上,所以在高空幕墙清洁过程中,需要通过动辄几百米的管线连接至机器上,过程中因为需要用真空发生器将正压气体转换成抽空真空,需要大量管接头进行转换,管路过长,极易发生漏气等影响高空作业机器安全的事故,且空压机运行噪音极大,会影响周边人群的正常工作生活。
技术实现要素:
3.本实用新型针对上述问题,提出了一种基于真空泵的清洁机器人。
4.本实用新型采取的技术方案如下:
5.一种基于真空泵的清洁机器人,包括框架、安装板、真空泵及减震块,所述真空泵固定设置在安装板上,所述减震块设置在安装板与真空泵之间,安装板安装在框架上。
6.本安装结构中采用了减震块来将真空泵安装到了安装板上,使用时只需要将安装板安装到所需的设备上即可使用,且由于真空泵工作时引起的震颤极其微弱,所以采用本安装结构的洁机器人在工作时的稳定性较强。
7.可选的,所述减震块为圆球状减震块,且减震块上设置有两个支撑柱,两个支撑柱在一条直线上,两个支撑柱与所述减震块一体成型,两个支撑柱分别贴紧所述真空泵及安装板。
8.在减震块的两端设置两个支撑柱这是为了增加真空泵与安装板之间的稳定性,使得真空泵在安装板上的安装更加稳定。
9.可选的,所述减震块上开设有通孔,两个支撑柱分别位于通孔的两侧。
10.在减震块上设置通孔的作用是为了使减震块具有更加良好的缓冲性能,使真空泵在工作时对安装板引起的震颤更小。
11.可选的,所述减震块为橡胶减震块。
12.可选的,还包括抱箍,所述真空泵通过抱箍安装固定在所述安装板上。
13.可选的,还包括第一接触脚与第二接触脚,所述第二接触脚有两个,且两个第二接触脚平行,所述真空泵夹紧在第一接触脚与第二接触脚之间。
14.可选的,当所述第一接触脚处于竖直状态时,所述第二接触脚托住所述真空泵。
15.第二接触脚托住真空泵,这样是为了提高真空泵的安装稳定性。
16.可选的,所述第一接触脚与所述第二接触脚保持平行。
17.第一接触脚与第二接触脚保持平行,这样一则可以提高抱箍夹紧时的稳定性,二
则便于将抱箍安装固定到安装板上。
18.可选的,所述真空泵为四头真空泵或多头真空泵,所述抱箍夹住所述真空泵的圆筒部。
19.本实用新型的有益效果是:采用了减震块来将真空泵安装到了安装板上,使用时只需要将安装板安装到所需的设备上即可使用,且由于真空泵工作时引起的震颤小于空压机,所以集成真空泵的清洁机器人在工作时的稳定性较强;且多头真空泵各泵头之间气路是独立抽吸,可以保持每个吸盘是独立运行,当其中一个发生破真空或其它故障时,不会影响其它吸盘,极大提升安全性。
附图说明:
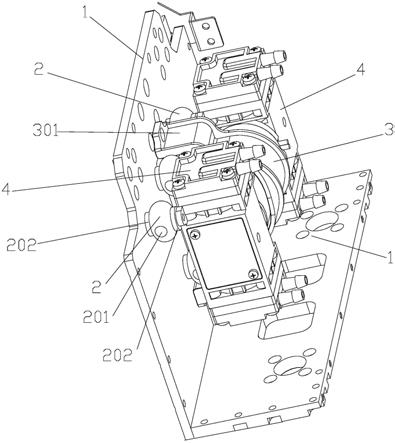
20.图1是真空泵的安装结构示意简图,
21.图2是真空泵在安装板上的结构示意图,
22.图3是基于真空泵的清洁机器人的结构示意简图。
23.图中各附图标记为:1、安装板,2、减震块,201、通孔,202、支撑柱,3、抱箍,301、第一接触脚,302、第二接触脚,4、真空泵,401、圆筒部,5、框架。
具体实施方式:
24.下面结合各附图,对本实用新型做详细描述。
25.如附图1及附图2所示,一种基于真空泵的清洁机器人,包括安装板 1、真空泵4及减震块2,真空泵4固定设置在安装板1上,减震块2设置在安装板1与真空泵4之间,安装板1安装在框架5上。
26.本安装结构中采用了减震块2来将真空泵4安装到了安装板1上,使用时只需要将安装板1安装到所需的设备上即可使用,且由于真空泵4工作时引起的震颤小于空压机,所以采用本安装结构的清洁机器人在抽真空时所引起的震颤极其微弱,在工作时的稳定性较强。
27.如附图1及附图2所示,减震块2为圆球状减震块2,且减震块2上设置有两个支撑柱202,两个支撑柱202在一条直线上,两个支撑柱202 与减震块2一体成型,两个支撑柱202分别贴紧真空泵4及安装板1。
28.在减震块2的两端设置两个支撑柱202这是为了增加真空泵4与安装板1之间的稳定性,使得真空泵4在安装板1上的安装更加稳定。
29.如附图1及附图2所示,减震块2上开设有通孔201,两个支撑柱202 分别位于通孔201的两侧。
30.在减震块2上设置通孔201的作用是为了使减震块2具有更加良好的缓冲性能,是真空泵4在工作时对安装板1引起的震颤更小。
31.如附图1及附图2所示,减震块2为橡胶减震块2。
32.如附图1及附图2所示,还包括抱箍3,真空泵4通过抱箍3安装固定在安装板1上。
33.如附图1及附图2所示,还包括第一接触脚与第二接触脚302,第二接触脚302有两个,且两个第二接触脚302平行,真空泵4夹紧在第一接触脚301与第二接触脚302之间。
34.如附图1及附图2所示,当第一接触脚301处于竖直状态时,第二接触脚302托住真
空泵4。
35.第二接触脚302托住真空泵4,这样是为了提高真空泵4的安装稳定性。
36.如附图1及附图2所示,第一接触脚301与第二接触脚302保持平行。
37.第一接触脚301与第二接触脚302保持平行,这样一则可以提高抱箍 3夹紧时的稳定性,二则便于将抱箍3安装固定到安装板1上。
38.如附图1及附图2所示,真空泵4为四头真空泵4或多头真空泵,抱箍3夹住真空泵4的圆筒部401。
39.如附图3所示,框架5上还安装有吸盘6及轮子7,真空泵4用于对吸盘6进行抽真空。
40.以上所述仅为本实用新型的优选实施例,并非因此即限制本实用新型的专利保护范围,凡是运用本实用新型说明书所作的等效变换,直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的保护范围内。
技术特征:
1.一种基于真空泵的清洁机器人,其特征在于,包括框架、安装板、真空泵及减震块,所述真空泵固定设置在安装板上,所述减震块设置在安装板与真空泵之间,所述安装板安装在框架上;所述减震块为圆球状减震块,且减震块上设置有两个支撑柱,两个支撑柱在一条直线上,两个支撑柱与所述减震块一体成型,两个支撑柱分别贴紧所述真空泵及安装板。2.如权利要求1所述的基于真空泵的清洁机器人,其特征在于,所述减震块上开设有通孔,两个支撑柱分别位于通孔的两侧。3.如权利要求1所述的基于真空泵的清洁机器人,其特征在于,所述减震块为橡胶减震块。4.如权利要求1所述的基于真空泵的清洁机器人,其特征在于,还包括抱箍,所述真空泵通过抱箍安装固定在所述安装板上。5.如权利要求4所述的基于真空泵的清洁机器人,其特征在于,还包括第一接触脚与第二接触脚,所述第二接触脚有两个,且两个第二接触脚平行,所述真空泵夹紧在第一接触脚与第二接触脚之间。6.如权利要求5所述的基于真空泵的清洁机器人,其特征在于,当所述第一接触脚处于竖直状态时,所述第二接触脚托住所述真空泵。7.如权利要求5所述的基于真空泵的清洁机器人,其特征在于,所述第一接触脚与所述第二接触脚保持平行。8.如权利要求5所述的基于真空泵的清洁机器人,其特征在于,所述真空泵为四头真空泵,所述抱箍夹住所述真空泵的圆筒部。
技术总结
本申请公开了基于真空泵的清洁机器人,包括框架、安装板、真空泵及减震块,所述真空泵固定设置在安装板上,所述减震块设置在安装板与真空泵之间,安装板上安装在框架上。本实用新型具有如下有益效果:采用了减震块来将真空泵安装到了安装板上,使用时只需要将安装板安装到所需的设备上即可使用,且由于真空泵工作时引起的震颤小于空压机,所以集成真空泵的清洁机器人在工作时的稳定性较强。机器人在工作时的稳定性较强。机器人在工作时的稳定性较强。
技术研发人员:姚冬暐
受保护的技术使用者:杭州埃欧珞机器人科技有限公司
技术研发日:2021.01.08
技术公布日:2021/12/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1