一种用于自动炒菜机的搅拌装置的制作方法
1.本实用新型涉及自动烹饪设备技术领域,尤其涉及一种用于自动炒菜机的搅拌装置。
背景技术:
2.炒菜机是微电脑操控的智能烹饪设备,能够自动进行多种烹饪,轻松实现了做饭过程的自动化和趣味化。对于圆柱体炒锅,一般采用搅拌筋绕其中轴线转动而对其内腔中的食材进行翻炒,而当自动炒菜机的炒锅包括上锅和下锅,且下锅与自动炒菜机的主机体为抽屉式装配时,若搅拌筋的结束停放位置处于下锅之中,将干扰出菜过程,必须手动调整,为此,我司技术人员对自动炒菜机的搅拌装置进行了更新设计。
技术实现要素:
3.本实用新型的目的在于针对已有的技术现状,提供一种用于自动炒菜机的搅拌装置,基于支座、联轴器、搅拌电机和电机支架构建搅拌筋的驱动机构,同时在固定的电机支架上布置光发射器和线阵ccd以及在非固定的联轴器上布置反光镜,结束炒菜时,通过光发射器发射的光线是否经反光镜反射至线阵ccd,进而判断搅拌筋是否处于适当的停放位置。
4.为达到上述目的,本实用新型采用如下技术方案:
5.一种用于自动炒菜机的搅拌装置,包括搅拌筋、支座、联轴器、搅拌电机和电机支架;
6.所述搅拌筋为u型结构,其一端设有用于与自动炒菜机的内腔壁转动连接的转轴,另一端设有将其与联轴器固定连接的装配孔,搅拌筋上设有采用橡胶材料制作的刮片;
7.所述支座中设有通孔,联轴器转动设置在支座上所设通孔之中,搅拌筋设有装配孔的一端与联轴器固定连接;
8.所述搅拌电机固定在电机支架上且其输出端与联轴器连接,搅拌电机通过联轴器驱动搅拌筋转动;
9.所述电机支架上设有光发射器和线阵ccd,光发射器和线阵ccd均为圆弧形结构且两者均位于穿过搅拌电机输出端的水平线之上或之下,所述联轴器上设有反光镜,反光镜相对联轴器的位置与搅拌筋相对联轴器的位置对应,结束炒菜时,通过光发射器发射的光线是否经反光镜反射至线阵ccd,进而判断搅拌筋是否处于适当的停放位置。
10.进一步的,所述刮片与搅拌筋为可拆卸连接,利于对其进行更换。
11.进一步的,所述刮片下边沿设有若干缺口,使其下边沿呈梳齿状结构,利于翻炒食材。
12.进一步的,所述搅拌筋上设有等间距设有若干刮片,利于翻炒食材。
13.进一步的,所述搅拌电机为步进电机,通过步进电机驱动搅拌筋转动,可精确控制其转动。
14.进一步的,所述电机支架上设有若干贯穿其前后两侧面的开口,通过设计开口结
构,增强电机支架的强度。
15.本实用新型的有益效果为:
16.相比于现有技术,其用于自动炒菜机的搅拌装置基于支座、联轴器、搅拌电机和电机支架构建搅拌筋的驱动机构,同时在固定的电机支架上布置光发射器和线阵ccd以及在非固定的联轴器上布置反光镜,结束炒菜时,通过光发射器发射的光线是否经反光镜反射至线阵ccd,进而判断搅拌筋是否处于适当的停放位置,无需手动调整。
附图说明
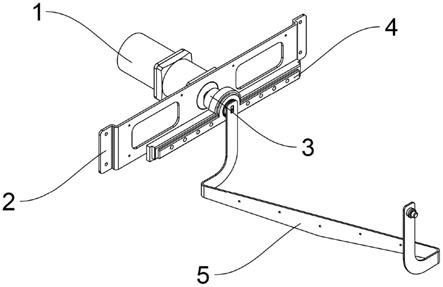
17.图1为本实用新型搅拌装置的立体图;
18.图2为本实用新型电机支架的主视图(含搅拌电机);
19.图3为本实用新型支座的后视图(含联轴器);
20.图4为本实用新型搅拌装置的主视图;
21.图5为本实用新型搅拌装置的主视图(刮片含缺口);
22.图6为本实用新型搅拌装置的主视图(含若干刮片)。
23.标注说明:1、搅拌电机,2、电机支架,2-1、开口,2-2、光发射器,2-3、线阵ccd,3、联轴器,3-1、反光镜,4、支座,5、搅拌筋,6、刮片。
具体实施方式
24.下面结合附图对本实用新型作进一步说明。
25.请参阅图1、4-6所示,一种用于自动炒菜机的搅拌装置,包括搅拌筋5、支座4、联轴器3、搅拌电机1和电机支架2。
26.所述搅拌筋5为u型结构,其一端设有用于与自动炒菜机的内腔壁转动连接的转轴(转动连接通过轴承实现),另一端设有将其与联轴器3固定连接的装配孔,搅拌筋5上设有采用橡胶材料制作的刮片6。其中,所述刮片6与搅拌筋5为可拆卸连接,利于对其进行更换。
27.作为一种实施例,所述刮片6下边沿设有若干缺口,使其下边沿呈梳齿状结构,利于翻炒食材。作为另一种实施例,所述搅拌筋5上设有等间距设有若干刮片6,利于翻炒食材。
28.所述支座4中设有通孔,联轴器3转动设置在支座4上所设通孔之中(转动连接通过轴承实现),搅拌筋5设有装配孔的一端与联轴器3固定连接。
29.所述搅拌电机1固定在电机支架2上且其输出端与联轴器3连接,搅拌电机1通过联轴器3驱动搅拌筋5转动。其中,所述电机支架2上设有若干贯穿其前后两侧面的开口2-1,通过设计开口结构,增强电机支架2的强度。所述搅拌电机1为步进电机,通过步进电机1驱动搅拌筋5转动,可精确控制其转动。
30.请参阅图2-3所示,所述电机支架2上设有光发射器2-2和线阵ccd2-3,光发射器2-2和线阵ccd2-3均为圆弧形结构且两者均位于穿过搅拌电机1输出端的水平线之上或之下,所述联轴器3上设有反光镜3-1,反光镜3-1相对联轴器3的位置与搅拌筋5相对联轴器3的位置对应,也就是说,反光镜3-1的相对位置即反映了搅拌筋5的相对位置。
31.由于搅拌筋5结构不规整,故光发射器2-2和线阵ccd2-3的弧度应尽量小于180
°
。需要指出的是,光发射器2-2和线阵ccd2-3也可以直接涉及为点块状结构,但信号不易识
别,因此未采用。
32.结束炒菜时,通过光发射器2-2发射的光线是否经反光镜3-1反射至线阵ccd2-3,进而判断搅拌筋5是否处于适当的停放位置。
33.具体的,当光发射器2-2和线阵ccd2-3均位于穿过搅拌电机1输出端的水平线之上时,若线阵ccd2-3检测到光发射器2-2的光信号时,搅拌筋5处于上锅之中;反之,当光发射器2-2和线阵ccd2-3均位于穿过搅拌电机1输出端的水平线之下时,若线阵ccd2-3检测到光发射器2-2的光信号时,搅拌筋5处于下锅之中。
34.更进一步的,结束炒菜时,若搅拌筋5处于上锅之中,搅拌电机1立即停止工作,若搅拌筋5处于下锅之中,则搅拌电机1继续工作直至搅拌筋5处于上锅之中。
35.本实用新型基于支座4、联轴器3、搅拌电机1和电机支架2构建搅拌筋5的驱动机构,同时在固定的电机支架2上布置光发射器2-2和线阵ccd2-3以及在非固定的联轴器3上布置反光镜3-1,结束炒菜时,通过光发射器2-2发射的光线是否经反光镜3-1反射至线阵ccd2-3,进而判断搅拌筋5是否处于适当的停放位置,无需手动调整。
36.当然,以上仅为本实用新型较佳实施方式,并非以此限定本实用新型的使用范围,故,凡是在本实用新型原理上做等效改变均应包含在本实用新型的保护范围内。
技术特征:
1.一种用于自动炒菜机的搅拌装置,其特征在于:包括搅拌筋、支座、联轴器、搅拌电机和电机支架;所述搅拌筋为u型结构,其一端设有用于与自动炒菜机的内腔壁转动连接的转轴,另一端设有将其与联轴器固定连接的装配孔,搅拌筋上设有采用橡胶材料制作的刮片;所述支座中设有通孔,联轴器转动设置在支座上所设通孔之中,搅拌筋设有装配孔的一端与联轴器固定连接;所述搅拌电机固定在电机支架上且其输出端与联轴器连接,搅拌电机通过联轴器驱动搅拌筋转动;所述电机支架上设有光发射器和线阵ccd,光发射器和线阵ccd均为圆弧形结构且两者均位于穿过搅拌电机输出端的水平线之上或之下,所述联轴器上设有反光镜,反光镜相对联轴器的位置与搅拌筋相对联轴器的位置对应。2.根据权利要求1所述的一种用于自动炒菜机的搅拌装置,其特征在于:所述刮片与搅拌筋为可拆卸连接。3.根据权利要求2所述的一种用于自动炒菜机的搅拌装置,其特征在于:所述刮片下边沿设有若干缺口,使其下边沿呈梳齿状结构。4.根据权利要求2所述的一种用于自动炒菜机的搅拌装置,其特征在于:所述搅拌筋上设有等间距设有若干刮片。5.根据权利要求1至4任意一项所述的一种用于自动炒菜机的搅拌装置,其特征在于:所述搅拌电机为步进电机,通过步进电机驱动搅拌筋转动。6.根据权利要求1所述的一种用于自动炒菜机的搅拌装置,其特征在于:所述电机支架上设有若干贯穿其前后两侧面的开口。
技术总结
本实用新型公开一种用于自动炒菜机的搅拌装置,包括搅拌筋、支座、联轴器、搅拌电机和电机支架。搅拌筋为U型结构,搅拌筋上设有采用橡胶材料制作的刮片,支座中设有通孔,联轴器转动设置在支座上所设通孔之中,搅拌筋一端与联轴器固定连接,搅拌电机固定在电机支架上且其输出端与联轴器连接,搅拌电机通过联轴器驱动搅拌筋转动;电机支架上设有光发射器和线阵CCD,联轴器上设有反光镜。本实用新型基于支座、联轴器、搅拌电机和电机支架构建搅拌筋的驱动机构,同时在固定的电机支架上布置光发射器和线阵CCD以及在非固定的联轴器上布置反光镜,结束炒菜时,通过光发射器发射的光线是否经反光镜反射至线阵CCD,进而判断搅拌筋是否处于适当的停放位置。处于适当的停放位置。处于适当的停放位置。
技术研发人员:魏胜军 谭惠文
受保护的技术使用者:武汉智慧大厨物联网科技有限公司
技术研发日:2021.09.29
技术公布日:2022/4/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1