一种基于雷达技术的智能清扫车装置的制作方法
[0001]
本发明涉及清扫车技术领域,尤其涉及一种基于雷达技术的智能 清扫车装置。
背景技术:
[0002]
我国清扫车行业历经数十年的发展,产品从单一的纯扫式发展到多种型式, 产品性能和产品质量迅速提高,通过进口关键外购件使扫路车产品性能和可靠 性大大提高。但如今我国扫路车的水平与国外发达国家相比,还存在一定的差 距,特别是在产品的可靠性方面。为尽快提高我国扫路车的水平,缩小与先进 国家扫路车水平的差距,满足我国环卫部门对路面清扫作业的要求,扫路车生 产企业应选择一个合适的扫路车研究方向。随着社会的发展、进步,不再满足 于单纯意义上的吸尘车,将从多功能、环保、经济等方面提出更多的要求,市 场呼唤能满足各种需求的吸尘车。就是在上述情况下,由北京中兴英杰科技有 限公司研制的具有自主知识产权全新的多功能扫吸式电动清扫车已正式投放市 场。这种全新的车型可一次完成地面清扫等工作,适用于各种气候和不同干燥 路面的清扫作业,更适合于广场、公路、住宅小区、停车场、码头、机场、车 站、水泥厂、电厂等场所的清洁除尘。
[0003]
现有的室内的清扫车都是通过旋转清理毛刷对地面进行清理,当 地面上粘粘一些粘状物,只通过清理毛刷进行旋转清理效果较差,导 致地面一些粘状物清理不掉需要人工二次清理,为了解决这个问题我 们提出一种基于雷达技术的智能清扫车装置。
技术实现要素:
[0004]
本发明的目的是为了解决现有技术中的室内的清扫车都是通过 旋转清理毛刷对地面进行清理,当地面上粘粘一些粘状物,只通过清 理毛刷进行旋转清理效果较差,导致地面一些粘状物清理不掉需要人 工二次清理的问题,而提出的一种基于雷达技术的智能清扫车装置。
[0005]
为了实现上述目的,本发明采用了如下技术方案:
[0006]
一种基于雷达技术的智能清扫车装置,包括盒体,所述盒体的内 腔分别开凿有第一工作仓、第二工作仓和第三工作仓,所述第一工作 仓的内腔设置有滑动块,所述滑动块的左侧设置有固定杆,所述第二 工作仓的内腔设置有框架,所述框架的左侧贯穿第二工作仓连接于滑 动块的外侧壁上,所述第二工作仓的顶壁固定连接有电机,所述电机 的输出端固定连接有第一转杆,所述第一转杆的底部转动连接在第二 工作仓的底部,所述第一转杆的外壁固定连接有凸轮,所述滑动块的 底部固定连接有支撑杆,所述支撑杆的底部安装有清理摩擦块,所述 第三工作仓的内腔设置有清扫机构,所述清扫车本体上分别设置有 gps定位模块、自动感应模块、cpu、数据处理模块和控制终端,所 述gps定位模块、自动感应模块、cpu、数据处理模块和控制终端电 性连接。
[0007]
优选的,所述固定杆的另一端固定连接于第一工作仓的内侧壁, 所述滑动块的左侧开凿有滑槽,所述固定杆插接于滑槽内,所述滑槽 的内腔设置有弹簧,所述弹簧的两侧
分别连接在滑槽的内侧壁和固定 杆上。
[0008]
优选的,所述清扫装置包括第二转杆,所述第二转杆转动连接在 第三工作仓的两侧,所述第二转杆的外壁固定连接有第二齿轮,两组 所述第二齿轮的外壁套接有第二齿轮带,所述第二转杆的底壁贯穿第 三工作仓连接有清理毛刷。
[0009]
优选的,所述第一转杆的外壁固定连接有第一齿轮,所述第一齿 轮位于凸轮的底部,右侧所述第二转杆的外壁固定连接有第三齿轮, 所述第一齿轮和第三齿轮的外壁套接有第一齿轮带,所述第三齿轮位 于第二齿轮的底部。
[0010]
优选的,所述框架的外侧壁固定连接有半圆形固定块,所述固定 块与凸轮相对应。
[0011]
优选的,所述清理毛刷由聚乙烯材料组成,所述清理摩擦块由记 忆棉组成。
[0012]
优选的,所述自动感应模块包括3d识别模块和生物识别模块。
[0013]
优选的,所述cpu包括室内导航模块、地图引擎模块和视觉导航 模块。
[0014]
与现有技术相比,本发明提供了一种基于雷达技术的智能清扫车 装置,具备以下有益效果:
[0015]
1、该基于雷达技术的智能清扫车装置,清理摩擦块左右移动从 而对地面上一些粘粘物体进行清除,通过第一转杆上设置的第一齿轮 通过第一齿轮带带动第三齿轮进行旋转,第三齿轮在旋转的过程中带 动第二转杆进行旋转,第二转杆在旋转的过程中通过第二齿轮带带动 两组第二齿轮同时进行旋转,从而带动清理毛刷进行旋转对地面进行 清扫,gps定位模块将当前的位置信息和自动感应模块得到信息通过 发送给cpu内,在cpu上显示辆车的当前工作状态,因此车辆在作业 时,所有的工作状态通过数据处理模块传输带控制终端,在控制终端 平台上都能实时监测到,并且如果在工作时间该车辆没有在制定区域 或者没有开启清扫工作,在控制终端就可以直接输出报警信息。
[0016]
2、该基于雷达技术的智能清扫车装置,3d识别模块具有体态姿 势和肌肉运动特点进行精确跟踪识别,并且实现基于事件和语义的主 动式防御预警和实时报警,此外,该技术还可对识别目标的体温、心 跳、呼吸、体重等生物特征进行非接触测量,从而多维度确保了对个 体行为和群体行为的高精度识别和预判。
[0017]
3、该基于雷达技术的智能清扫车装置,生物识别模块根据人体 特征具有人体所固有的不可复制的独一性,这一生物密钥无法复制, 失窃或被遗忘,利用生物识别技术进行身份认定,安全、可靠、准确, 而常见的口令、ic卡、条纹码、磁卡或钥匙则存在着丢失、遗忘、 复制及被盗用诸多不利因素。
[0018]
4、该基于雷达技术的智能清扫车装置,室内导航模块利用wi-fi 热点对室内进行定位和导航,地图引擎模块可以快速创建交互式的地 图应用,依靠视觉所提供的实时信息可以与惯性导航和gps信息进行 融介,弥补后两者的缺陷,摄像机更善于捕捉运动信息,从而提高导 航精度。
附图说明
[0019]
图1为本发明提出的一种基于雷达技术的智能清扫车装置的结 构示意图;
[0020]
图2为本发明提出的一种基于雷达技术的智能清扫车装置的剖 视图;
[0021]
图3为本发明提出的一种基于雷达技术的智能清扫车装置图2的 a-a剖视图;
[0022]
图4为本发明提出的一种基于雷达技术的智能清扫车装置第二 转杆的结构示意图;
[0023]
图5为本发明提出的一种基于雷达技术的智能清扫车装置图2的 a部放大图;
[0024]
图6为本发明提出的一种基于雷达技术的智能清扫车装置的电 路图;
[0025]
图7为本发明提出的一种基于雷达技术的智能清扫车装置自动 感应模块的电路图;
[0026]
图8为本发明提出的一种基于雷达技术的智能清扫车装置cpu的 电路图。
[0027]
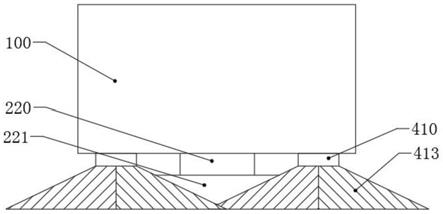
图中:100、盒体;200、第一工作仓;210、滑动块;211、固定 杆;212、滑槽;213、弹簧;220、支撑杆;221、清理摩擦块;230、 框架;300、第二工作仓;310、电机;320、第一转杆;321、凸轮; 322、第一齿轮;323、第一齿轮带;400、第三工作仓;410、第二转 杆;411、第二齿轮;412、第三齿轮;413、清理毛刷;420、第二齿 轮带;500、gps定位模块;510、自动感应模块;511、3d识别模块;512、生物识别模块;520、cpu;521、室内导航模块;522、地图引 擎模块;523、视觉导航模块;530、数据处理模块;540、控制终端。
具体实施方式
[0028]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方 案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部 分实施例,而不是全部的实施例。
[0029]
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、
ꢀ“
后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示 的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于 描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具 有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明 的限制。
[0030]
实施例1:
[0031]
参照图1-8,一种基于雷达技术的智能清扫车装置,包括盒体 100,盒体100的内腔分别开凿有第一工作仓200、第二工作仓300 和第三工作仓400,第一工作仓200的内腔设置有滑动块210,滑动 块210的左侧设置有固定杆211,第二工作仓300的内腔设置有框架 230,框架230的左侧贯穿第二工作仓300连接于滑动块210的外侧 壁上,第二工作仓300的顶壁固定连接有电机310,电机310的输出 端固定连接有第一转杆320,第一转杆320的底部转动连接在第二工 作仓300的底部,第一转杆320的外壁固定连接有凸轮321,滑动块 210的底部固定连接有支撑杆220,支撑杆220的底部安装有清理摩 擦块221,第三工作仓400的内腔设置有清扫机构,清扫车本体上分 别设置有gps定位模块500、自动感应模块510、cpu520、数据处理 模块530和控制终端540,gps定位模块500、自动感应模块510、 cpu520、数据处理模块530和控制终端540电性连接,固定杆211的 另一端固定连接于第一工作仓200的内侧壁,滑动块210的左侧开凿 有滑槽212,固定杆211插接于滑槽212内,滑槽212的内腔设置有 弹簧213,弹簧213的两侧分别连接在滑槽212的内侧壁和固定杆211 上,清扫装置包括第二转杆410,第二转杆410转动连接在第三工作 仓400的两侧,第二转杆410的外壁固定连接有第二齿轮411,两组 第二齿轮411的外壁套接有第二齿轮带420,第二转杆410的底壁贯 穿第三工作仓400连接有清理毛刷413,第一转杆320的外壁固定连 接有第一齿轮322,第一齿轮322位于凸轮321的底部,右侧第二转 杆410的外壁固定连接有第三齿轮412,第一齿轮322和第三齿轮412 的外壁套接有第一齿轮带323,第三齿轮412位于第二齿
轮411的底 部,框架230的外侧壁固定连接有半圆形固定块,固定块与凸轮321 相对应,清理毛刷413由聚乙烯材料组成,清理摩擦块221由记忆棉 组成。
[0032]
将盒体100放入清扫车的内腔,当地面需要清扫时通过启动第二 工作仓300内的电机310,电机310在旋转的过程中带动凸轮321进 行旋转,凸轮321在旋转的过程中对半圆形固定块进行拨打,半圆形 固定块受力带动框架230向左移动,框架230向左移动的过程中带动 滑动块210向左移动,滑动块210向左移动带动支撑杆220和清理摩 擦块221向左移动,在固定杆211和弹簧213的作用下,推动滑动块 210向右移动,如此往复运动带动支撑杆220和清理摩擦块221左右 移动从而对地面上一些粘粘物体进行清除,通过第一转杆320上设置 的第一齿轮322通过第一齿轮带323带动第三齿轮412进行旋转,第 三齿轮412在旋转的过程中带动第二转杆410进行旋转,第二转杆 410在旋转的过程中通过第二齿轮带420带动两组第二齿轮411同时 进行旋转,从而带动清理毛刷413进行旋转对地面进行清扫,gps定 位模块500将当前的位置信息和自动感应模块510得到信息通过发送 给cpu520内,在cpu500上显示辆车的当前工作状态,因此车辆在作 业时,所有的工作状态通过数据处理模块530传输带控制终端540, 在控制终端540平台上都能实时监测到,并且如果在工作时间该车辆 没有在制定区域或者没有开启清扫工作,在控制终端540就可以直接 输出报警信息。
[0033]
实施例2:
[0034]
参照图6,一种基于雷达技术的智能清扫车装置,与实施例1基 本相同,更进一步的是,自动感应模块510包括3d识别模块511和 生物识别模块512。
[0035]
3d识别模块511利用黎曼几何和深度学习的算法,使用大量基 于gpu520的并行计算,以毫米级精度对观察到的现实世界进行三维 空间还原,准确地分离环境、物体和人物,并实现实时的观察和理解, 该技术能够在3d空间把人群分割为独立人体,根据骨构造、3d面部 特点和其他特征如:体态姿势和肌肉运动特点进行精确跟踪识别,并 且实现基于事件和语义的主动式防御预警和实时报警,此外,该技术 还可对识别目标的体温、心跳、呼吸、体重等生物特征进行非接触测 量,从而多维度确保了对个体行为和群体行为的高精度识别和预判, 生物识别模块512根据人体特征具有人体所固有的不可复制的独一 性,这一生物密钥无法复制,失窃或被遗忘,利用生物识别技术进行 身份认定,安全、可靠、准确,而常见的口令、ic卡、条纹码、磁 卡或钥匙则存在着丢失、遗忘、复制及被盗用诸多不利因素,因此采 用生物"钥匙",您可以不必携带大串的钥匙,也不用费心去记或更换 密码,而系统管理员更不必因忘记密码而束手无策,生物识别技术产 品均借助于现代计算机技术实现,很容易配合电脑和安全、监控、管 理系统整合,实现自动化管理。
[0036]
实施例3:
[0037]
参照图8,一种基于雷达技术的智能清扫车装置,与实施例1基 本相同,更进一步的是,cpu520包括室内导航模块521、地图引擎模 块522和视觉导航模块523。
[0038]
室内导航模块521利用wi-fi热点对室内进行定位和导航,地图 引擎模块522可以快速创建交互式的地图应用,支持大屏端、桌面端、 移动端三屏地图应用开发,支持栅格切片及新一代矢量切片地图;提 供地图渲染、地图操作、空间搜索、正反向地理编码等服务,通过数 据处理模块530将地图位置数据传输到控制终端540内,便于控制终 端540对清扫车进行控制,视觉导航模块523包括视觉图像预处理, 目标提取、目标跟踪、数据融介等问
题,其中,运动目标检测可采用 背景差法、帧差法、光流法等,固定标志物检测可用到角点提取、边 提取、小变矩、hough变换、贪婪算法等,目标跟踪可以分析特征进 行状态估计,并与其他传感器融介,用到的方法有卡尔曼滤波、粒子 滤波器和人工神经网络等,还有很多方法诸如全景图像几何形变的分 析或者地平线的检测等没有进行特征提取,而是自接将图像的某一变 量加到控制中去,依靠视觉所提供的实时信息可以与惯性导航和gps 信息进行融介,弥补后两者的缺陷,摄像机更善于捕捉运动信息,从 而提高导航精度。
[0039]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范 围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技 术范围内,根据本发明的技术方案及其发明构思加以等同替换或改 变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1