一种机器人头部旋转结构的制作方法
[0001]
本发明属于机器人领域,具体涉及一种机器人头部旋转结构。
背景技术:
[0002]
近两年,人形机器人发展迅速,市场上已出现了大量产品,人形机器人走入万千家庭已指日可待。机器人它具有感知环境的能力,借助一部分传感器识别工作环境,具有一定的独立工作能力。它主要用于餐厅或家政服务,可以用来完成迎宾、引导客人、点餐、厅内送餐等服务项目。
[0003]
现有的机器人头部普遍为固定式,为了赋予机器人更友好的的交互方式,亟待设计一种机器人头部旋转结构,配合显示器,提供机器人脑部更多的活动度。
技术实现要素:
[0004]
针对现有技术所存在的上述不足,本发明的目的是提供一种机器人头部旋转结构,可使机器人头部水平转动,也可前后俯仰转动,更为灵活。
[0005]
为了实现上述目的,本发明提供一种机器人头部旋转结构,包括
[0006]
上盖,为头盔状的罩壳,下部设置有嵌合的凸起,
[0007]
下盖,上部和前部开口,侧面设置有锁紧扳手,锁紧扳手有两个,对称设置在左右两侧,通过旋转锁紧扳手可安装和拆卸上盖,所述上盖和下盖内形成腔体,
[0008]
挡板,安装在上盖前部,所述挡板为透明状,带有弧度,
[0009]
显示屏,竖直设置在上盖内侧前部,朝向前方,位于挡板内侧,显示屏与主机连接,显示屏后部贴合有散热板,所述散热板为软性材料,对显示屏起缓冲作用,
[0010]
平转马达,机体内安装有支架,所述平转马达安装在支架上,平转马达竖向设置,平转马达的输出轴上可拆卸地安装有连接轴,所述连接轴可在平转马达带动下旋转;
[0011]
俯仰轴,所述俯仰轴安装在连接轴顶端,俯仰轴水平放置,俯仰轴的两端分别设置有转盘,所述转盘分别与所述下盖左右两侧可拆卸地连接,所述转盘与俯仰轴通过轴承连接,转盘可绕旋转轴轴线转动,
[0012]
俯仰马达,安装在所述俯仰轴内,俯仰马达可在主机控制旋转,带动所述转盘、下盖正转、反转,
[0013]
限位块,安装在俯仰轴端部,限位块为l状,所述俯仰轴的转盘上设置有两个红外对射器,红外对射器包括发射端和接受端,转盘旋转时若限位块挡住红外线,主机接收到信号,俯仰马达不再转动更大角度。
[0014]
进一步地,所述上盖为前大后小的圆弧形。
[0015]
进一步地,所述下盖内侧设置有可旋转的卡扣,旋转锁紧扳手,卡扣可扣接住上盖。
[0016]
进一步地,所述挡板为亚克力板。
[0017]
本发明的有益效果是:
[0018]
本发明所述的机器人头部旋转结构,可使机器人的头部平转任意角度,同时可进行前后俯仰旋转,俯仰机构带有限位角度,避免机器人头部的损坏,配合面部的显示屏,与人交互的方式更多,动作更生动。
附图说明
[0019]
图1为本发明所述的机器人的立体示意图;
[0020]
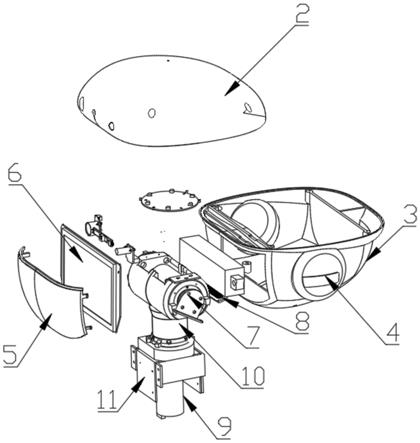
图2为本发明所述的机器人头部旋转结构的装配放大示意图;
[0021]
图3为本发明所述的机器人头部旋转结构的水平转动、俯仰旋转机构的放大示意图;
[0022]
图4为图3的a部分的的放大示意图。
[0023]
图中:1、机体;2、上盖;3、下盖;4、锁紧扳手;5、挡板;6、显示屏;7、俯仰轴;8、散热板;9、平转马达;10、连接轴;11、支架;12、俯仰马达;13、限位块;14、红外对射器。
具体实施方式
[0024]
下面结合附图和具体实施例详细描述一下本发明的具体内容。
[0025]
如图1、2所示,一种机器人头部旋转结构,包括
[0026]
上盖2,为头盔状的罩壳,下部设置有嵌合的凸起,
[0027]
下盖3,上部和前部开口,侧面设置有锁紧扳手4,锁紧扳手4有两个,对称设置在左右两侧,通过旋转锁紧扳手4可安装和拆卸上盖2,所述上盖2和下盖3内形成腔体,
[0028]
挡板5,安装在上盖2前部,所述挡板5为透明状,带有弧度,
[0029]
显示屏6,竖直设置在上盖2内侧前部,朝向前方,位于挡板5内侧,显示屏6与主机连接,显示屏6后部贴合有散热板8,所述散热板8为软性材料,对显示屏6起缓冲作用,
[0030]
如图3所示,平转马达9,机体1内安装有支架11,所述平转马达9安装在支架11上,平转马达9竖向设置,平转马达9的输出轴上可拆卸地安装有连接轴10,所述连接轴10可在平转马达9带动下旋转;
[0031]
俯仰轴7,所述俯仰轴7安装在连接轴10顶端,俯仰轴7水平放置,俯仰轴7的两端分别设置有转盘,所述转盘分别与所述下盖3左右两侧可拆卸地连接,所述转盘与俯仰轴7通过轴承连接,转盘可绕旋转轴轴线转动,
[0032]
俯仰马达12,安装在所述俯仰轴7内,俯仰马达12可在主机控制旋转,带动所述转盘、下盖3正转、反转,
[0033]
如图4所示,限位块13,安装在俯仰轴7端部,限位块13为l状,所述俯仰轴7的转盘上设置有两个红外对射器14,红外对射器14包括发射端和接受端,转盘旋转时若限位块13挡住红外线,主机接收到信号,俯仰马达12不再转动更大角度。
[0034]
在实际应用中,所述上盖2为前大后小的圆弧形。
[0035]
在实际应用中,所述下盖3内侧设置有可旋转的卡扣,旋转锁紧扳手4,卡扣可扣接住上盖2。
[0036]
在实际应用中,所述挡板5为亚克力板。
[0037]
综上所述,本发明可使机器人的头部平转任意角度,同时可进行前后俯仰旋转,俯仰机构带有限位角度,避免机器人头部的损坏,配合面部的显示屏,与人交互的方式更多,
动作更生动。
[0038]
以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,上述实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并加以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1