一体式四轴关节机器人的制作方法
1.本实用新型专利涉及机器人的技术领域,具体而言,涉及一体式四轴关节机器人。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.现有技术中,机器人的本体常与控制电箱呈分离式设计,这样,控制连线信号则经常会收到干扰,大大降低机器人的控制精度,且导致机器人的占地面积大,安装也繁琐。
技术实现要素:
4.本实用新型的目的在于提供一体式四轴关节机器人,旨在解决现有技术中,机器人的本体与控制电箱分离设置,降低控制精度的问题。
5.本实用新型是这样实现的,一体式四轴关节机器人,包括电箱底座、设置在电箱底座上的本体以及位于电箱底座上控制本体运作的控制盒;所述本体包括转动布置的一轴座体、二轴臂、三轴臂以及四轴手腕,所述二轴臂的内端与一轴座体转动连接,所述三轴臂的内端与二轴臂的外端转动连接,所述四轴手腕连接在所述三轴臂的外端,所述四轴手腕具有转动的输出端。
6.进一步的,所述一轴座体上设置有驱动所述一轴座体转动的一轴电机,所述一轴座体的下部设有一轴减速器,所述一轴电机与一轴减速器连接;所述一轴减速器内设置有供导线穿过至所述电箱底座内的过线筒。
7.进一步的,所述一轴座体的下部朝下延伸有限制一轴座体转动角度的一轴限位块。
8.进一步的,所述一轴座体的侧边朝上延伸,形成外延段,所述二轴臂的内端转动连接在所述外延段上。
9.进一步的,所述外延段具有与二轴臂连接的二轴连接面,所述二轴连接面上设有限制二轴臂转动角度的二轴限位片。
10.进一步的,所述二轴臂的外端朝上延伸布置。
11.进一步的,所述三轴臂的外端朝背离一轴座体的方向延伸布置。
12.进一步的,所述二轴臂的外端具有与三轴臂连接的三周连接面,所述三轴连接面上设有限制三轴臂转动角度的三轴限位块。
13.进一步的,所述控制盒连接在所述三轴臂上。
14.进一步的,所述二轴臂的外端连接有摆动布置的三角臂,所述三角臂具有第一角端、第二角端以及第三角端,所述三角臂的第一角度与二轴臂的外端转动连接,所述三角臂的第二角端通过第一连接臂与一轴座体连接,所述三角臂的第三角端通过第二连接壁与四轴手腕连接。
15.与现有技术相比,本实用新型提供的一体式四轴关节机器人,一轴座体相对于电箱底座转动,二轴臂相对于一轴座体转动,三轴臂相对于二轴臂转动,四轴臂具有转动的输出端,这样,则实现了四轴关节的效果,且电箱底座、本体以及控制盒一体式布置,控制连线信号不会受到干扰,保证机器人的控制精度,且机器人的占地面积小,安装方便。
附图说明
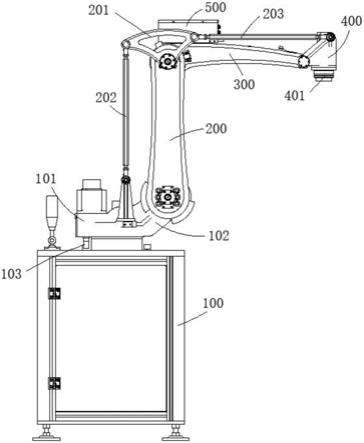
16.图1是本实用新型提供的一体式四轴关节机器人的立体示意图。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
18.以下结合具体实施例对本实用新型的实现进行详细的描述。
19.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本实用新型的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
20.参照图1所示,为本实用新型提供的较佳实施例。
21.本实施例提供的一体式四轴关节机器人,可以运用在任何需要的场合,如针对冲压行业轻负载产品水平搬运及上下料、码垛等,或者在工业生产中代替人工进行重复性、危险性等时间较长的作业,其将人类从繁重的体力劳动中解放出来,节省人工、增加产能、提高工作效率。
22.一体式四轴关节机器人,包括电箱底座100、设置在电箱底座100上的本体以及位于电箱底座100上控制本体运作的控制盒500;本体包括转动布置的一轴座体101、二轴臂200、三轴臂300以及四轴手腕400,二轴臂200的内端与一周座体转动连接,三轴臂300的内端与二轴臂200的外端转动连接,四轴手腕400连接在三轴臂300的外端,四轴手腕400具有转动的输出端401。
23.上述提供的一体式四轴关节机器人,一轴座体101相对于电箱底座100转动,二轴臂200相对于一轴座体101转动,三轴臂300相对于二轴臂200转动,四轴臂具有转动的输出端401,这样,则实现了四轴关节的效果,且电箱底座100、本体以及控制盒500一体式布置,控制连线信号不会受到干扰,保证机器人的控制精度,且机器人的占地面积小,安装方便。
24.一轴座体101上设置有驱动一轴座体101转动的一轴电机,一轴座体101的下部设有一轴减速器,一轴电机与一轴减速器连接;一轴减速器内设置有供导线穿过至电箱底座100内的过线筒。这样,便于导线的布置,便于导线与电箱底座100的连接。
25.一轴座体101的下部朝下延伸有限制一轴座体101转动角度的一轴限位块103,这样,则可以对一轴座体101的转动范围进行限制。
26.一轴座体101的侧边朝上延伸,形成外延段102,二轴臂200的内端转动连接在外延
段102上,这样,便于二轴臂200与一轴座体101的连接。
27.外延段102具有与二轴臂200连接的二轴连接面,二轴连接面上设有限制二轴臂200转动角度的二轴限位片,通过二轴限位片则可以限制二轴臂200的转动范围。
28.二轴臂200的外端朝上延伸布置,根据实际需要,二轴臂200的外延也可以朝向其他方位布置。
29.三轴臂300的外端朝背离一轴座体101的方向延伸布置。
30.二轴臂200的外端具有与三轴臂300连接的三周连接面,所述三轴连接面上设有限制三轴臂300转动角度的三轴限位块。
31.控制盒500连接在所述三轴臂300上,或者,根据实际需要,也可以将三轴臂300设置在其他方位。
32.二轴臂200的外端连接有摆动布置的三角臂201,三角臂201具有第一角端、第二角端以及第三角端,三角臂201的第一角度与二轴臂200的外端转动连接,三角臂201的第二角端通过第一连接臂202与一轴座体101连接,三角臂201的第三角端通过第二连接臂与203四轴手腕400连接。
33.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一体式四轴关节机器人,其特征在于,包括电箱底座、设置在电箱底座上的本体以及位于电箱底座上控制本体运作的控制盒;所述本体包括转动布置的一轴座体、二轴臂、三轴臂以及四轴手腕,所述二轴臂的内端与一轴座体转动连接,所述三轴臂的内端与二轴臂的外端转动连接,所述四轴手腕连接在所述三轴臂的外端,所述四轴手腕具有转动的输出端。2.如权利要求1所述的一体式四轴关节机器人,其特征在于,所述一轴座体上设置有驱动所述一轴座体转动的一轴电机,所述一轴座体的下部设有一轴减速器,所述一轴电机与一轴减速器连接;所述一轴减速器内设置有供导线穿过至所述电箱底座内的过线筒。3.如权利要求2所述的一体式四轴关节机器人,其特征在于,所述一轴座体的下部朝下延伸有限制一轴座体转动角度的一轴限位块。4.如权利要求2所述的一体式四轴关节机器人,其特征在于,所述一轴座体的侧边朝上延伸,形成外延段,所述二轴臂的内端转动连接在所述外延段上。5.如权利要求4所述的一体式四轴关节机器人,其特征在于,所述外延段具有与二轴臂连接的二轴连接面,所述二轴连接面上设有限制二轴臂转动角度的二轴限位片。6.如权利要求1至4任一项所述的一体式四轴关节机器人,其特征在于,所述二轴臂的外端朝上延伸布置。7.如权利要求1至4任一项所述的一体式四轴关节机器人,其特征在于,所述三轴臂的外端朝背离一轴座体的方向延伸布置。8.如权利要求1至4任一项所述的一体式四轴关节机器人,其特征在于,所述二轴臂的外端具有与三轴臂连接的三轴连接面,所述三轴连接面上设有限制三轴臂转动角度的三轴限位块。9.如权利要求1至4任一项所述的一体式四轴关节机器人,其特征在于,所述控制盒连接在所述三轴臂上。10.如权利要求1至4任一项所述的一体式四轴关节机器人,其特征在于,所述二轴臂的外端连接有摆动布置的三角臂,所述三角臂具有第一角端、第二角端以及第三角端,所述三角臂的第一角度与二轴臂的外端转动连接,所述三角臂的第二角端通过第一连接臂与一轴座体连接,所述三角臂的第三角端通过第二连接壁与四轴手腕连接。
技术总结
本实用新型涉及机器人的技术领域,公开了一体式四轴关节机器人,包括电箱底座、设置在电箱底座上的本体以及位于电箱底座上控制本体运作的控制盒;本体包括转动布置的一轴座体、二轴臂、三轴臂以及四轴手腕,二轴臂的内端与一轴座体转动连接,三轴臂的内端与二轴臂的外端转动连接,四轴手腕连接在三轴臂的外端,四轴手腕具有转动的输出端;一轴座体相对于电箱底座转动,二轴臂相对于一轴座体转动,三轴臂相对于二轴臂转动,四轴臂具有转动的输出端,这样,则实现了四轴关节的效果,且电箱底座、本体以及控制盒一体式布置,控制连线信号不会受到干扰,保证机器人的控制精度,且机器人的占地面积小,安装方便。安装方便。安装方便。
技术研发人员:刘钟军 柏中超 梁纶高 武胜强 许兵轮
受保护的技术使用者:广州合纵智能设备有限公司
技术研发日:2020.10.16
技术公布日:2021/10/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1