一种机器人用金属卡扣安装装置的制作方法
1.本实用新型涉及机器人自动安装领域,具体地涉及一种机器人用金属卡扣安装装置。
背景技术:
2.在汽车装配过程中,需要对金属卡扣进行安装,现有的安装多为手动安装或者利用专门的机构进行安装,其存在着工作效率低、劳动成本高或经济成本高的问题。而且大型的安装机构一般占地面积大,并不适合汽车组件的装配,而人工安装又无法达到工作效率的要求。因此,研究一种占地面积小,方便使用,效率高的金属卡扣安装结构成为一个迫切需要解决的问题。
技术实现要素:
3.针对以上情况,本实用新型提供了一种机器人用金属卡扣安装装置,其能够对金属卡扣进行自动取放及安装,提高了工作效率,降低了劳动成本。
4.具体地,本实用新型提供一种机器人用金属卡扣安装装置,其包括机器人连接座、固定座、取卡杆以及磁吸组件,
5.所述机器人连接座的第一端连接机器人本体,所述机器人连接座的第二端连接所述固定座,所述机器人连接座能够在所述机器人本体的转轴的带动下旋转,从而带动所述固定座旋转;所述机器人连接座为圆柱状结构,所述机器人连接座的两端分别设置有一个凸台结构,所述凸台结构用于连接所述机器人本体或者所述固定座;
6.所述固定座为圆盘状结构,所述机器人连接座的第二端与所述圆盘状结构的中心固定连接,所述圆盘状结构的外圆周上均匀开设有多个凹槽结构,所述取卡杆设置有多个,所述取卡杆的第一端固定在所述凹槽结构内部,所述取卡杆的第二端设置所述磁吸组件,多个取卡杆成放射状设置在所述固定座的外圆周上;
7.所述磁吸组件能够吸取金属卡扣并将所述金属卡扣放置在装卡工件的卡槽内部。
8.优选地,所述取卡杆为圆柱形杆状结构。
9.优选地,所述机器人连接座连接所述机器人的第六轴。
10.优选地,所述凹槽结构为长方形凹槽,所述取卡杆的第一端借助于销钉与所述长方形凹槽固定。
11.优选地,所述固定座的表面上开设有放气孔。
12.优选地,所述取卡杆的数量小于或等于所述凹槽结构的数量。
13.优选的,所述磁吸装置为磁铁或电磁感应线圈。
14.优选地,所述凸台结构上均匀设置有安装孔。
15.本实用新型的特点和有益效果是:
16.本实用新型提供了一种机器人用金属卡扣安装装置,其能够对金属卡扣进行自动取放及安装,提高了工作效率,降低了劳动成本。
17.本实用新型能够集成在现有的机器人上进行使用,设置在机器人第六轴上,无需外部动力,能够节省装配人工,提高工作效率。
附图说明
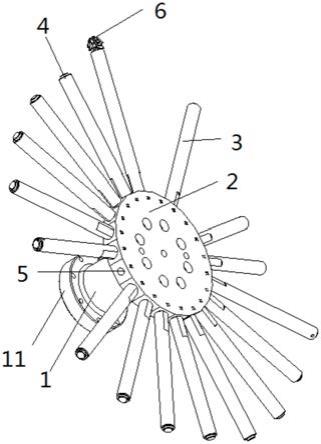
18.图1为本实用新型的立体结构示意图;
19.图2为本实用新型的俯视结构示意图;
20.图3为本实用新型的侧视结构示意图。
21.图中部分附图标记如下:
[0022]1‑
机器人连接座,2
‑
固定座,3
‑
取卡杆,4
‑
磁吸组件,5
‑
凹槽结构,6
‑
金属卡扣。
具体实施方式
[0023]
为详尽本实用新型之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
[0024]
具体地,本实用新型提供一种机器人用金属卡扣安装装置,如图1至图3 所示,其包括机器人连接座1、固定座2、取卡杆3以及磁吸组件4。
[0025]
所述机器人连接座1的第一端连接机器人本体,所述机器人连接座1的第二端连接所述固定座2,所述机器人连接座1能够在所述机器人本体的转轴的带动下旋转,从而带动所述固定座2旋转;所述机器人连接座1为圆柱状结构,所述机器人连接座1的两端分别设置有一个凸台结构11,所述凸台结构11用于连接所述机器人本体或者所述固定座2。
[0026]
所述固定座2为圆盘状结构,所述机器人连接座1的第二端与所述圆盘状结构的中心固定连接,所述圆盘状结构的外圆周上均匀开设有多个凹槽结构5,所述取卡杆3设置有多个,所述取卡杆3的第一端固定在所述凹槽结构5内部,所述取卡杆3的第二端设置所述磁吸组件4,多个取卡杆3成放射状设置在所述固定座2的外圆周上。
[0027]
所述磁吸组件4能够吸取金属卡扣6并将所述金属卡扣6放置在装卡工件的卡槽内部。
[0028]
优选地,所述取卡杆3为圆柱形杆状结构。
[0029]
优选地,所述机器人连接座1连接所述机器人的第六轴。
[0030]
优选地,所述凹槽结构为长方形凹槽,所述取卡杆3的第一端借助于销钉与所述长方形凹槽固定。
[0031]
优选地,所述固定座2的表面上开设有放气孔21。
[0032]
优选地,所述取卡杆3的数量小于或等于所述凹槽结构5的数量。
[0033]
优选的,在实施例中,磁吸装置可以为磁铁或电磁感应线圈,当设置为电磁感应线圈时可以通过通电或放电控制金属卡扣的取放。当设置为磁铁时,将金属卡扣卡入卡槽内即可移走磁铁。
[0034]
优选地,所述凸台结构上均匀设置有安装孔。借助于安装件和安装孔能够实现机器人连接座的固定。
[0035]
下面对本实用新型的工作原理进行进一步说明:
[0036]
在使用时,机器人将此机构通过机器人第六轴旋转,将示教好的取卡杆对准待取卡扣。磁铁将卡扣吸住,然后机器人将装卡机构移动到需要装卡工件上方,机器人通过此装
卡机构将卡扣压入工件,完成装卡。
[0037]
此机构用于汽车内外饰自动化装卡扣设备,此机构集成在机器人第六轴。节省装配人工,提高工作效率。
[0038]
本实用新型的特点和有益效果是:
[0039]
本实用新型提供了一种机器人用金属卡扣安装装置,其能够对金属卡扣进行自动取放及安装,提高了工作效率,降低了劳动成本。
[0040]
以上所述的实施例仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新型的技术方案做出的各种变形和改进,均应落入本实用新型权利要求书确定的保护范围内。
技术特征:
1.一种机器人用金属卡扣安装装置,其特征在于:其包括机器人连接座、固定座、取卡杆以及磁吸组件,所述机器人连接座的第一端连接机器人本体,所述机器人连接座的第二端连接所述固定座,所述机器人连接座能够在所述机器人本体的转轴的带动下旋转,从而带动所述固定座旋转;所述机器人连接座为圆柱状结构,所述机器人连接座的两端分别设置有一个凸台结构,所述凸台结构用于连接所述机器人本体或者所述固定座;所述固定座为圆盘状结构,所述机器人连接座的第二端与所述圆盘状结构的中心固定连接,所述圆盘状结构的外圆周上均匀开设有多个凹槽结构,所述取卡杆设置有多个,所述取卡杆的第一端固定在所述凹槽结构内部,所述取卡杆的第二端设置所述磁吸组件,多个取卡杆成放射状设置在所述固定座的外圆周上;所述磁吸组件能够吸取金属卡扣并将所述金属卡扣放置在装卡工件的卡槽内部。2.根据权利要求1所述的机器人用金属卡扣安装装置,其特征在于:所述取卡杆为圆柱形杆状结构。3.根据权利要求1所述的机器人用金属卡扣安装装置,其特征在于:所述机器人连接座连接所述机器人的第六轴。4.根据权利要求1所述的机器人用金属卡扣安装装置,其特征在于:所述凹槽结构为长方形凹槽,所述取卡杆的第一端借助于销钉与所述长方形凹槽固定。5.根据权利要求1所述的机器人用金属卡扣安装装置,其特征在于:所述固定座的表面上开设有放气孔。6.根据权利要求1所述的机器人用金属卡扣安装装置,其特征在于:所述取卡杆的数量小于或等于所述凹槽结构的数量。7.根据权利要求1所述的机器人用金属卡扣安装装置,其特征在于:所述磁吸装置为磁铁或电磁感应线圈。8.根据权利要求1所述的机器人用金属卡扣安装装置,其特征在于:所述凸台结构上均匀设置有安装孔。
技术总结
本实用新型涉及一种机器人用金属卡扣安装装置,其包括机器人连接座、固定座、取卡杆以及磁吸组件,所述机器人连接座的第一端连接机器人本体,所述机器人连接座的第二端连接所述固定座,所述机器人连接座能够在所述机器人本体的转轴的带动下旋转,从而带动所述固定座旋转;所述磁吸组件能够吸取金属卡扣并将所述金属卡扣放置在装卡工件的卡槽内部。本实用新型能够对金属卡扣进行自动取放及安装,提高了工作效率,降低了劳动成本。降低了劳动成本。降低了劳动成本。
技术研发人员:俞董卫
受保护的技术使用者:武汉伟立德自动化机器人有限公司
技术研发日:2020.11.30
技术公布日:2021/9/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1