一种基于毫米波雷达技术的油田巡检机器人的制作方法
1.本发明涉及机器人技术领域,尤其涉及一种基于毫米波雷达技术的油田巡检机器人。
背景技术:
2.油田管道的安全是关系着油田安全生产的重要因素。现有技术对综合油田管道进行检查,很长时间内都是依靠人工。随着机器人技术的迅猛发展和在各领域应用不断深入,国内外一些研究人员近些年来开始关注将机器人技术引入综合油田管道巡检领域,毫米波雷达,是工作在毫米波波段(millimeter wave)探测的雷达。通常毫米波是指30~300ghz频域(波长为1~10mm)的。毫米波的波长介于微波和厘米波之间,毫米波雷达兼有微波雷达和光电雷达的一些优点,因此一些设备机器中装设有毫米波雷达对周围进行探测。
3.现有的油田巡检机器人在使用时不能对内部控制器进行快速散热,且其空气检测仪在对油气进行检测时,容易出现杂质附着,导致后期检测效果差,所以我们提出一种基于毫米波雷达技术的油田巡检机器人。
技术实现要素:
4.本发明的目的是为了解决现有的油田巡检机器人在使用时不能对内部控制器进行快速散热,且其空气检测仪在对油气进行检测时,容易出现杂质附着,导致后期检测效果差的缺点,而提出的一种基于毫米波雷达技术的油田巡检机器人。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种基于毫米波雷达技术的油田巡检机器人,包括机体,所述机体的顶部固定安装有壳体,壳体的底部内壁上固定安装有定位柱,定位柱上活动连接有支撑杆,支撑杆的顶端固定安装有摄像头,所述壳体的顶部内壁与左侧内壁上均固定安装有导风盒,所述导风盒的内壁上设有导风机构,所述壳体的一侧内壁上固定安装有电机,电机的输出轴上固定安装有转杆,转杆与导风机构传动连接,所述定位柱上设有角度调节机构,角度调节机构与转杆传动连接,所述壳体的底部内壁上固定安装有控制器,两个导风盒中第一个导风盒的内壁上固定安装有检测仪,所述导风盒的内壁上固定安装有隔离网,所述检测仪的外侧设有过滤网,过滤网与导风盒的内壁固定连接,且壳体的顶部内壁上转动连接有转轴,转轴与对应的导风盒转动连接,且转轴上设有清洁机构,清洁机构与过滤网相互配合,所述壳体的顶部安装有毫米波雷达探测器。
7.优选的,所述导风机构包括两个固定柱,两个固定柱固定安装在对应的导风盒内壁上,且固定柱上转动有定位轴,定位轴上固定安装有扇叶,且两个定位轴均与转杆传动连接,转杆的一端固定安装有第一锥形齿轮,两个定位轴中的一个定位轴的顶端固定安装有第二锥形齿轮,第一锥形齿轮与第二锥形齿轮相互啮合,转杆上固定套设有第一皮带轮,两个定位轴中的另一个定位轴上固定套设有第二皮带轮,第一皮带轮与第二皮带轮上传动连接有同一个皮带,转动的转杆通过第一皮带轮、第二皮带轮和皮带的传动连接带动对应的
定位轴进行转动,同时转动的转杆通过第一锥形齿轮与第二锥形齿轮的相互啮合带动另一个定位轴进行转动,进而能够带动两个扇叶同时转动,从而对壳体内进行吹风散热。
8.优选的,所述角度调节机构包括传动杆,传动杆与转杆传动连接,传动杆与支撑杆传动连接,转杆上固定安装有两个蜗杆,转轴与传动杆上均固定安装有蜗轮,蜗杆与蜗轮相互啮合,传动杆的顶端固定安装有主动齿轮,定位柱的顶端转动连接有从动齿轮,主动齿轮与从动齿轮相互啮合,且从动齿轮与支撑杆滑动连接,转杆上转动连接有两个设置的定位箱,两个定位箱分别与转轴和传动杆转动连接,转动的转杆通过蜗杆与蜗轮的相互啮合带动传动杆进行转动,并通过主动齿轮与从动齿轮的相互啮合带动支撑杆进行转动,进而能够带动摄像头的角度调节。
9.优选的,所述清洁机构包括清洁刷,转轴上固定安装有转辊,转辊上活动套设有移动板,移动板上开设有活动孔,活动孔与转辊活动连接,移动板的底部固定安装有两个对称的连接杆,连接杆与清洁刷固定连接,且清洁刷与过滤网相互配合,转辊上开设有循环槽,活动孔的内壁固定安装有定位块,定位块与循环槽滑动连接,转动的转轴带动转辊转动,转辊通过循环槽与定位块的滑动连接带动移动板上下移动,进而能够带动清洁刷对过滤网进行清洁。
10.与现有技术相比,本发明的优点在于:
11.(1)本方案由于设置了第一锥形齿轮与第二锥形齿轮的相互啮合,且第一皮带轮、第二皮带轮和皮带的传动连接,使得转动的转杆能够带动扇叶进行转动,进而能够对壳体内控制器的吹风散热;
12.(2)由于循环槽与定位块的滑动连接,且连接杆与清洁刷的固定连接,使得转动的转杆能够带动清洁刷上下移动,进而能够对过滤网进行上下清洁;
13.(3)由于蜗杆与蜗轮的相互啮合,且主动齿轮与从动齿轮的相互啮合,使得转动的转杆能够带动支撑杆进行角度变动,从而能够对摄像头进行角度变动。
14.本发明操作简单,使用方便,能够便于对机器人内的控制器进行吹风散热,同时还能对检测仪外的过滤网进行清洁,并带动摄像头进行角度变动,从而增加巡视范围。
附图说明
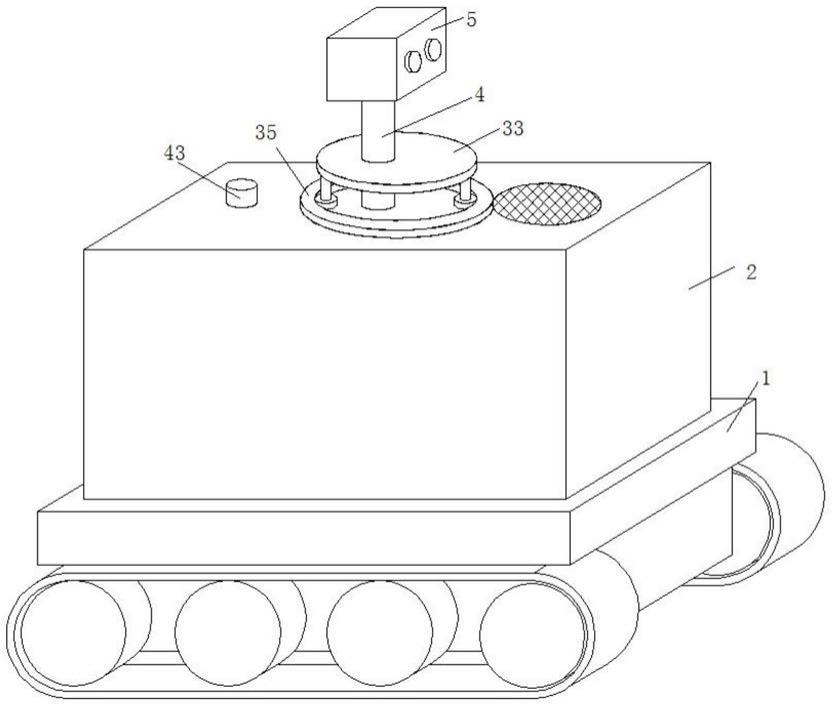
15.图1为本发明提出的一种基于毫米波雷达技术的油田巡检机器人的立体结构示意图;
16.图2为本发明提出的一种基于毫米波雷达技术的油田巡检机器人的正视剖视结构示意图;
17.图3为本发明提出的一种基于毫米波雷达技术的油田巡检机器人的内齿环截面结构示意图;
18.图4为本发明提出的一种基于毫米波雷达技术的油田巡检机器人的a部分结构示意图;
19.图5为本发明提出的一种基于毫米波雷达技术的油田巡检机器人的b部分结构示意图。
20.图中:1、机体;2、壳体;3、定位柱;4、支撑杆;5、摄像头;6、导风盒;7、固定柱;8、定位轴;9、扇叶;10、隔离网;11、电机;12、转杆;13、第一锥形齿轮;14、第二锥形齿轮;15、传动
杆;16、蜗杆;17、蜗轮;18、定位箱;19、主动齿轮;20、从动齿轮;21、检测仪;22、过滤网;23、转轴;24、转辊;25、移动板;26、连接杆;27、清洁刷;28、活动孔;29、循环槽;30、定位块;31、控制器;32、顶杆;33、定位板;34、传动齿轮;35、内齿环;36、环形滑槽;37、连接块;38、固定槽;39、滑块;40、第一皮带轮;41、第二皮带轮;42、皮带;43、毫米波雷达探测器。
具体实施方式
21.下面将结合本实施例中的附图,对本实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实施例一部分实施例,而不是全部的实施例。
22.实施例一
23.参照图1
‑
5,一种基于毫米波雷达技术的油田巡检机器人,包括机体1,机体1的顶部固定安装有壳体2,壳体2的底部内壁上固定安装有定位柱3,定位柱3上活动连接有支撑杆4,支撑杆4的顶端固定安装有摄像头5,壳体2的顶部内壁与左侧内壁上均固定安装有导风盒6,导风盒6的内壁上设有导风机构,壳体2的一侧内壁上固定安装有电机11,电机11的输出轴上固定安装有转杆12,转杆12与导风机构传动连接,定位柱3上设有角度调节机构,角度调节机构与转杆12传动连接,壳体2的底部内壁上固定安装有控制器31,两个导风盒6中第一个导风盒6的内壁上固定安装有检测仪21,导风盒6的内壁上固定安装有隔离网10,检测仪21的外侧设有过滤网22,过滤网22与导风盒6的内壁固定连接,且壳体2的顶部内壁上转动连接有转轴23,转轴23与对应的导风盒6转动连接,且转轴23上设有清洁机构,清洁机构与过滤网22相互配合,壳体2的顶部安装有毫米波雷达探测器43。
24.本实施例中,导风机构包括两个固定柱7,两个固定柱7固定安装在对应的导风盒6内壁上,且固定柱7上转动有定位轴8,定位轴8上固定安装有扇叶9,且两个定位轴8均与转杆12传动连接,转杆12的一端固定安装有第一锥形齿轮13,两个定位轴8中的一个定位轴8的顶端固定安装有第二锥形齿轮14,第一锥形齿轮13与第二锥形齿轮14相互啮合,转杆12上固定套设有第一皮带轮40,两个定位轴8中的另一个定位轴8上固定套设有第二皮带轮41,第一皮带轮40与第二皮带轮41上传动连接有同一个皮带42,转动的转杆12通过第一皮带轮40、第二皮带轮41和皮带42的传动连接带动对应的定位轴8进行转动,同时转动的转杆12通过第一锥形齿轮13与第二锥形齿轮14的相互啮合带动另一个定位轴8进行转动,进而能够带动两个扇叶9同时转动,从而对壳体2内进行吹风散热。
25.本实施例中,角度调节机构包括传动杆15,传动杆15与转杆12传动连接,传动杆15与支撑杆4传动连接,转杆12上固定安装有两个蜗杆16,转轴23与传动杆15上均固定安装有蜗轮17,蜗杆16与蜗轮17相互啮合,传动杆15的顶端固定安装有主动齿轮19,定位柱3的顶端转动连接有从动齿轮20,主动齿轮19与从动齿轮20相互啮合,且从动齿轮20与支撑杆4滑动连接,转杆12上转动连接有两个设置的定位箱18,两个定位箱18分别与转轴23和传动杆15转动连接,转动的转杆12通过蜗杆16与蜗轮17的相互啮合带动传动杆15进行转动,并通过主动齿轮19与从动齿轮20的相互啮合带动支撑杆4进行转动,进而能够带动摄像头5的角度调节。
26.本实施例中,清洁机构包括清洁刷27,转轴23上固定安装有转辊24,转辊24上活动套设有移动板25,移动板25上开设有活动孔28,活动孔28与转辊24活动连接,移动板25的底部固定安装有两个对称的连接杆26,连接杆26与清洁刷27固定连接,且清洁刷27与过滤网
22相互配合,转辊24上开设有循环槽29,活动孔28的内壁固定安装有定位块30,定位块30与循环槽29滑动连接,转动的转轴23带动转辊24转动,转辊24通过循环槽29与定位块30的滑动连接带动移动板25上下移动,进而能够带动清洁刷27对过滤网22进行清洁。
27.工作原理,工作时,启动电机11开关,电机11的输出轴带动转杆12转动,转杆12通过第一皮带轮40、第二皮带轮41和皮带42的传动连接带动对应的定位轴8进行转动,同时转动的转杆12通过第一锥形齿轮13与第二锥形齿轮14的相互啮合带动对应的定位轴8进行转动,使得转动的转杆12能够带动两个扇叶9进行转动,进而能够对壳体2内进行吹风散热,同时转动的转杆12通过蜗杆16与蜗轮17的相互啮合带动传动杆15与转轴23进行转动,转动的传动杆15通过主动齿轮19与从动齿轮20的相互啮合带动支撑杆4进行转动,进而能够带动摄像头5进行角度调节,同时转动的转轴23带动转辊24转动,转辊24通过循环槽29与定位块30的滑动连接带动移动板25上下移动,移动板25通过连接杆26带动清洁刷27上下移动,进而能够通过清洁刷27对过滤网22进行清洁,从而能够保持最大的检测效果,毫米波雷达探测器43的设置能够对周围的情况进行探测。
28.实施例二
29.参照图1
‑
5,一种基于毫米波雷达技术的油田巡检机器人,包括机体1,机体1的顶部固定安装有壳体2,壳体2的底部内壁上固定安装有定位柱3,定位柱3上活动连接有支撑杆4,支撑杆4的顶端固定安装有摄像头5,壳体2的顶部内壁与左侧内壁上均固定安装有导风盒6,导风盒6的内壁上设有导风机构,壳体2的一侧内壁上固定安装有电机11,电机11的输出轴上固定安装有转杆12,转杆12与导风机构传动连接,定位柱3上设有角度调节机构,角度调节机构与转杆12传动连接,壳体2的底部内壁上固定安装有控制器31,两个导风盒6中第一个导风盒6的内壁上固定安装有检测仪21,导风盒6的内壁上固定安装有隔离网10,检测仪21的外侧设有过滤网22,过滤网22与导风盒6的内壁固定连接,且壳体2的顶部内壁上转动连接有转轴23,转轴23与对应的导风盒6转动连接,且转轴23上设有清洁机构,清洁机构与过滤网22相互配合,壳体2的顶部安装有毫米波雷达探测器43,壳体2的顶部转动滑动连接有两个对称设置的顶杆32,两个顶杆32的顶端固定安装有同一个定位板33,定位板33与支撑杆4转动连接,壳体2的顶部转动连接有两个对称设置的传动齿轮34,且壳体2的顶部转动连接有内齿环35,内齿环35与两个传动齿轮34相互啮合,传动齿轮34与对应的顶杆32螺纹连接,壳体2的顶部开设有环形滑槽36,环形滑槽36的内壁上滑动连接有两个对称设置的连接块37,环形滑槽36的两侧内壁上均开设有固定槽38,固定槽38内滑动连接有两个滑块39,滑块39与对应的连接块37固定连接。
30.本实施例中,导风机构包括两个固定柱7,两个固定柱7固定安装在对应的导风盒6内壁上,且固定柱7上转动有定位轴8,定位轴8上固定安装有扇叶9,且两个定位轴8均与转杆12传动连接,转杆12的一端固定安装有第一锥形齿轮13,两个定位轴8中的一个定位轴8的顶端固定安装有第二锥形齿轮14,第一锥形齿轮13与第二锥形齿轮14相互啮合,转杆12上固定套设有第一皮带轮40,两个定位轴8中的另一个定位轴8上固定套设有第二皮带轮41,第一皮带轮40与第二皮带轮41上传动连接有同一个皮带42,转动的转杆12通过第一皮带轮40、第二皮带轮41和皮带42的传动连接带动对应的定位轴8进行转动,同时转动的转杆12通过第一锥形齿轮13与第二锥形齿轮14的相互啮合带动另一个定位轴8进行转动,进而能够带动两个扇叶9同时转动,从而对壳体2内进行吹风散热。
31.本实施例中,角度调节机构包括传动杆15,传动杆15与转杆12传动连接,传动杆15与支撑杆4传动连接,转杆12上固定安装有两个蜗杆16,转轴23与传动杆15上均固定安装有蜗轮17,蜗杆16与蜗轮17相互啮合,传动杆15的顶端固定安装有主动齿轮19,定位柱3的顶端转动连接有从动齿轮20,主动齿轮19与从动齿轮20相互啮合,且从动齿轮20与支撑杆4滑动连接,转杆12上转动连接有两个设置的定位箱18,两个定位箱18分别与转轴23和传动杆15转动连接,转动的转杆12通过蜗杆16与蜗轮17的相互啮合带动传动杆15进行转动,并通过主动齿轮19与从动齿轮20的相互啮合带动支撑杆4进行转动,进而能够带动摄像头5的角度调节。
32.本实施例中,清洁机构包括清洁刷27,转轴23上固定安装有转辊24,转辊24上活动套设有移动板25,移动板25上开设有活动孔28,活动孔28与转辊24活动连接,移动板25的底部固定安装有两个对称的连接杆26,连接杆26与清洁刷27固定连接,且清洁刷27与过滤网22相互配合,转辊24上开设有循环槽29,活动孔28的内壁固定安装有定位块30,定位块30与循环槽29滑动连接,转动的转轴23带动转辊24转动,转辊24通过循环槽29与定位块30的滑动连接带动移动板25上下移动,进而能够带动清洁刷27对过滤网22进行清洁。
33.工作原理,实施例二与实施例一的区别在于,当需要对摄像头5的高度进行调节时,转动内齿环35,内齿环35通过与两个传动齿轮34的相互啮合带动两个内齿环35进行转动,转动的内齿环35通过与顶杆32的螺纹连接能够带动顶杆32进行移动,进而通过定位板33带动支撑杆4进行高度变动,从而调节摄像头5进行高度变动。
34.以上所述,仅为本实施例较佳的具体实施方式,但本实施例的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实施例揭露的技术范围内,根据本实施例的技术方案及其发明构思加以等同替换或改变,都应涵盖在本实施例的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1