一种基于模块化设计的隧道内部病害智能巡检机器人的制作方法
1.本实用新型涉及智能机器人领域,具体的讲是一种基于模块化设计的隧道内部病害智能巡检机器人。
背景技术:
2.随着机器人技术的不断发展,各个领域都迎来技术革新,隧道等地下工程病害巡检领域也不例外。由于机器人不但可以在恶劣的环境中工作,并且能够在检查中通过数据处理提供客观的判断,准确率高,因此人们开始使用机器人技术对隧道、管廊等进行检修,以降低检修人员的劳动强度和安全风险,提升巡检质量。目前巡检机器人已经开始得到应用。
3.另外,在隧道内机器人的应用普及中,渐渐出现了能够结合多种传感手段实现隧道环境监测的机器人,如利用多个超声波传感器和摄像机共同探测隧道内墙壁的机器人;通过轮式平台移动,在人工控制下对隧道内墙面损伤进行远程修复的机器人。
4.我国隧道监测机器人大多采用悬轨式设计,并且可以实现自动行走,动力方面一般采用伺服电机驱动。为了适应电力隧道环境,一般采用无接触供电。通过遥控的方式完成机器人巡检,可以对隧道内温度、湿度和空气含气量数据进行检测。通过交互式指挥功能,机器人在探测位置能精确停车进行检测,当隧道中发生突发事件时能高速到达发生点,并且当有障碍物存在于机器人移动路径上时能自动停止并且避障的功能。但同时我国的隧道监测机器人也存在轨道布置不够灵活,适应地形能力差,机器人通信抗干扰能力较弱,可靠性和稳定性差,采集数据能力较差等情况。
5.因此设计一种基于模块化设计的隧道内部病害智能巡检机器人是十分有必要的。
技术实现要素:
6.本实用新型突破了现有技术的难题,设计了一种基于模块化设计的隧道内部病害智能巡检机器人。
7.为了达到上述目的,本实用新型设计了一种基于模块化设计的隧道内部病害智能巡检机器人,包括机械臂、车壳、底盘、车顶盖、导航摄像头、巡检摄像头、功能模块、控制器模块,车壳固定在底盘上,导航摄像头和机械臂穿过车顶盖固定在车壳内,车顶盖安装在车壳顶部,巡检摄像头安装在机械臂的一端,车壳内部设有若干个功能模块,功能模块在车壳内部左右并列连接或上下拼接连接,控制器模块与功能模块电性连接,控制器模块与底盘内的驱动电机电性连接。
8.车壳包括车壳底板和车壳侧板,车壳底板上设有均匀分布的凹洞。
9.底盘包括驱动电机、减速器、履带系统、车体底座、弹簧减震器,车体底座的两侧设有履带系统,驱动电机和减速器安装在车体底座内的后侧,弹簧减震器固定在车体底座内前侧的台阶上。
10.车顶盖上开有若干尺寸不一的矩形孔。
11.功能模块包括模块外壳和传感器,模块外壳包括模块顶盖、模块支架、模块底座、传感器固定座,模块顶盖的四角设有凹槽,模块底座的四角设有凸块,凸块插入模块顶盖上的凹槽或者车壳底板上的凹洞,模块支架连接模块顶盖与模块底座,模块顶盖的中心开有矩形方孔,矩形方孔内和模块支架四周设有挡板,传感器固定座固定在模块底座上,传感器固定在模块底座上。
12.控制器模块包括主控顶盖、主控壳体、主控底座、主控板,主控板固定在主控底座上,主控壳体连接主控底座与主控顶盖。
13.主控顶盖、主控壳体与主控底座上均开有加工槽。
14.本实用新型与现有技术相比,通过将传统的巡检机器人模块化,并且每部分设计都有固定的标准规定,使得巡检机器人通用化应用成为可能,从而大大降低了应用成本;模块化后巡检机器人的拆装维护便捷,当巡检机器人在环境恶劣的隧道内工作期间,对于该机器人的维护和维修只需要针对指定模块,大大提升维护效率的同时,也减少了维修人员面临的风险;模块化后巡检机器人的拓展性和可选择性得到了提升,根据不同的工作环境和工作需求,需要选用不同类型与性能的传感器与其他部件,每一个部分形状规则,且容易制造;整个模块兼容性好,能够满足多种传感器或部件的安装。
附图说明
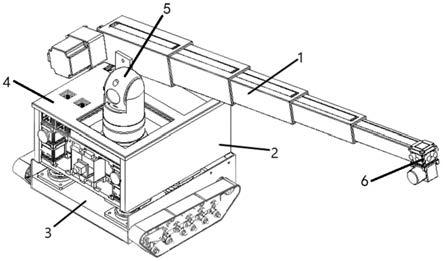
15.图1为本实用新型的结构示意图。
16.图2为本实用新型车壳的结构示意图。
17.图3为本实用新型底盘的结构示意图。
18.图4为本实用新型车顶盖的结构示意图。
19.图5为本实用新型功能模块的结构示意图。
20.图6为本实用新型功能模块去除挡板的内部示意图。
21.图7为本实用新型主控模块的结构示意图。
具体实施方式
22.结合附图对本实用新型做进一步描述。
23.结合图1~图7,本实用新型设计了一种基于模块化设计的隧道内部病害智能巡检机器人,包括机械臂1、车壳2、底盘3、车顶盖4、导航摄像头5、巡检摄像头6、功能模块7、控制器模块8,车壳2固定在底盘3上,导航摄像头5和机械臂1穿过车顶盖4固定在车壳2内,车顶盖4安装在车壳2顶部,巡检摄像头6安装在机械臂1的一端,接触充电座9安装在底盘3的后侧,与底盘3内的驱动电机31电性连接,通过与充电坞接触进行充电,车壳2内部设有若干个功能模块7,功能模块7在车壳2内部左右并列连接或上下拼接连接,控制器模块8与功能模块7电性连接,控制器模块8与底盘3内的驱动电机31电性连接。
24.车壳2包括车壳底板21和车壳侧板22,车壳底板21上设有均匀分布的凹洞23,模块在车壳内可将底部的凸起块插入凹洞23,同时可以限制车壳2的移动,车壳2的材料为不锈钢,当需要更多模块时,只需要选择性地更换底板和左右侧板,即可扩充车壳2的容量。
25.底盘3包括驱动电机31、减速器32、履带系统33、车体底座34、弹簧减震器35,车体底座34的两侧设有履带系统33,驱动电机31和减速器32安装在车体底座34内的后侧,弹簧
减震器35固定在车体底座34内前侧的台阶上。
26.车顶盖4上开有若干尺寸不一的矩形孔,为了内部的模块腾出空间,去除干涉。
27.功能模块7包括模块外壳和传感器74,模块外壳包括模块顶盖71、模块支架72、模块底座73、传感器固定座75,模块顶盖71的四角设有凹槽,模块底座73的四角设有凸块,凸块插入模块顶盖71上的凹槽或者车壳底板21上的凹洞23,模块支架72 连接模块顶盖71与模块底座73,模块顶盖71的中心开有矩形方孔,矩形方孔内和模块支架72四周设有挡板,传感器固定座75固定在模块底座73上,传感器74固定在模块底座73上。其中传感器74可根据需求设置不同的功能传感器,模块的挡板根据传感器74的特点进行改定,例如传感器74选用气体传感器,由于气体传感器需要空气流通来收集气体信号,故挡板可换成透气有孔的材料,方便气体传感器的工作。
28.控制器模块8包括主控顶盖81、主控壳体82、主控底座83、主控板84,主控板84固定在主控底座83上,主控壳体82连接主控底座83与主控顶盖81。
29.主控顶盖81、主控壳体82与主控底座83上均开有加工槽,以实现其走线要求。
技术特征:
1.一种基于模块化设计的隧道内部病害智能巡检机器人,包括机械臂(1)、车壳(2)、底盘(3)、车顶盖(4)、导航摄像头(5)、巡检摄像头(6)、功能模块(7)、控制器模块(8),车壳(2)固定在底盘(3)上,导航摄像头(5)和机械臂(1)穿过车顶盖(4)固定在车壳(2)内,车顶盖(4)安装在车壳(2)顶部,巡检摄像头(6)安装在机械臂(1)的一端,其特征在于:车壳(2)内部设有若干个功能模块(7),功能模块(7)在车壳(2)内部左右并列连接或上下拼接连接,控制器模块(8)与功能模块(7)电性连接,控制器模块(8)与底盘(3)内的驱动电机(31)电性连接。2.根据权利要求1所述的一种基于模块化设计的隧道内部病害智能巡检机器人,其特征在于:所述的车壳(2)包括车壳底板(21)和车壳侧板(22),车壳底板(21)上设有均匀分布的凹洞(23)。3.根据权利要求1所述的一种基于模块化设计的隧道内部病害智能巡检机器人,其特征在于:所述的底盘(3)包括驱动电机(31)、减速器(32)、履带系统(33)、车体底座(34)、弹簧减震器(35),车体底座(34)的两侧设有履带系统(33),驱动电机(31)和减速器(32)安装在车体底座(34)内的后侧,弹簧减震器(35)固定在车体底座(34)内前侧的台阶上。4.根据权利要求1所述的一种基于模块化设计的隧道内部病害智能巡检机器人,其特征在于:所述的车顶盖(4)上开有若干尺寸不一的矩形孔。5.根据权利要求1所述的一种基于模块化设计的隧道内部病害智能巡检机器人,其特征在于:所述的功能模块(7)包括模块外壳和传感器(74),模块外壳包括模块顶盖(71)、模块支架(72)、模块底座(73)、传感器固定座(75),模块顶盖(71)的四角设有凹槽,模块底座(73)的四角设有凸块,凸块插入模块顶盖(71)上的凹槽或者车壳底板(21)上的凹洞(23),模块支架(72)连接模块顶盖(71)与模块底座(73),模块顶盖(71)的中心开有矩形方孔,矩形方孔内和模块支架(72)四周设有挡板,传感器固定座(75)固定在模块底座(73)上,传感器(74)固定在模块底座(73)上。6.根据权利要求1所述的一种基于模块化设计的隧道内部病害智能巡检机器人,其特征在于:所述的控制器模块(8)包括主控顶盖(81)、主控壳体(82)、主控底座(83)、主控板(84),主控板(84)固定在主控底座(83)上,主控壳体(82)连接主控底座(83)与主控顶盖(81)。7.根据权利要求6所述的一种基于模块化设计的隧道内部病害智能巡检机器人,其特征在于:所述的主控顶盖(81)、主控壳体(82)与主控底座(83)上均开有加工槽。
技术总结
本实用新型涉及智能机器人领域,具体的讲是一种基于模块化设计的隧道内部病害智能巡检机器人,包括机械臂、车壳、底盘、车顶盖、导航摄像头、巡检摄像头、功能模块、控制器模块,车壳固定在底盘上,导航摄像头和机械臂穿过车顶盖固定在车壳内,车顶盖安装在车壳顶部,巡检摄像头安装在机械臂的一端,车壳内部设有若干个功能模块,功能模块在车壳内部左右并列连接或上下拼接连接,控制器模块与功能模块电性连接,控制器模块与底盘内的驱动电机电性连接。与现有技术相比,通用性高;维护效率提升的同时,减少维修人员的风险;拓展性和可选择性得到了提升,整个模块兼容性好,能够满足多种传感器或部件的安装。感器或部件的安装。感器或部件的安装。
技术研发人员:戴振宇 金恩 丁炜 陈光辉 胡晓 滕丽 常莹 周畅 彭崇梅 苏东华 池瑜 周兰兰 王胜勇 任红梅 金昌哲 王晓宇 封玲 薛子欣 赵鹏 胡珉 高新闻 沈卓
受保护的技术使用者:上海城建城市运营(集团)有限公司
技术研发日:2021.04.09
技术公布日:2021/12/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1