一种攀爬飞行两栖机器人机体可升降车轴架的制作方法
1.本实用涉及隧道检测设备技术领域,具体涉及一种攀爬飞行两栖机器人机体可升降车轴架,用于攀爬飞行两栖机器人在越障过程中对于自身机体进行保护,通过承载于攀爬车轴上的伸缩机构抬升机架避免机器人框架与障碍碰撞。
背景技术:
2.当前市面上的各类攀爬飞行两栖机器人存在越障困难,在越障过程中普遍存在攀爬飞行两栖机器人的机体或者框架与障碍物碰撞,摩擦和剐蹭等会导致机体受损的不可避免的损耗,这些损耗会破坏机体的整体结构导致机体的使用寿命降低和性能下降。
3.因此提出一种新型攀爬飞行两期机器人机体可升降车轴,使用本新型可以在越障时提高底盘避免机器人和障碍碰撞。
技术实现要素:
4.本实用新型克服现有技术存在的不足,所要解决的技术问题为:提供一种攀爬飞行两栖机器人机体可升降车轴架。
5.为了解决上述技术问题,本实用新型采用的技术方案为:一种攀爬飞行两栖机器人机体可升降车轴架,包括车轴、滑动杆、连接器和斜滑动轴,机器人机体上设置有固定的滑槽,所述滑槽方向与车轴方向平行,滑动杆的顶端设置在滑槽内,连接器滑动设置在滑动杆上,连接器上设置有连接轴,所述斜滑动轴的一端与车轴固定连接,另一端套接在所述连接轴上,所述车轴的端部设置有车轮。
6.所述的一种攀爬飞行两栖机器人机体可升降车轴架,还包括上框架,所述上框架固定设置在机器人机体上,所述滑槽设置在上框架上。
7.所述车轴与车轮之间设置有压力传感器。
8.所述连接器上设置有与滑动杆匹配的通孔,所述滑动杆穿过连接器上的通孔,并通过限位器限位。
9.本实用新型与现有技术相比具有以下有益效果:
10.1、本实用新型提供了一种攀爬飞行两栖机器人机体可升降车轴,通过在检测机器人上设置存在凹槽的上框架中放置滑动杆,在机体通过斜面时,斜面会对机体产生一个由一个车轮指向一对车轮(一对前车轮或一对后车轮)中另一个车轮的水平分力,本实用新型的沿车轴方向的车轮,车轴,滑动杆,传感器,斜滑动轴,滑动槽,转动电机可视为一个整体结构,所以这个水平分力表现为凹槽中滑动杆的水平移动,减轻对机体固定机构的磨损,起到保护机体,安全越障的目的。
11.2、本实用新型提供了一种攀爬飞行两栖机器人机体可升降车轴,在水平通过斜面道路时,两车轮的离地高度可以不一致,可使机体重心更加贴近道路与机器人机体接触面,可以在不做其他改变的情况下水平通过更大的斜坡实现机器人的安全越障,提高了安全性能。
12.3、本实用新型的升降车轴采用包括上框架部分,连接部分和车轴部分的非固定式连接,可以使机体有更好的灵活性。而且通过斜滑动轴和滑动杆间接连接而非直接连接,增加了机架体结构可变性,不易在越障过程中出现机体卡死的情况。
附图说明
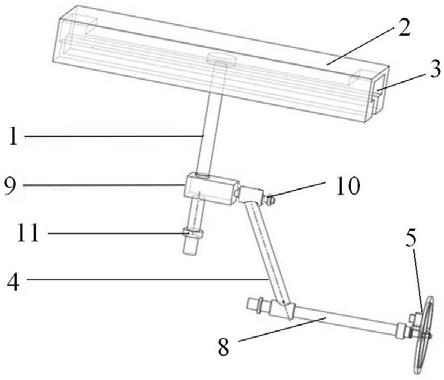
13.图1为本实用新型实施例提供的一种攀爬飞行两栖机器人机体可升降车轴架的结构示意图;
14.图2为本实用新型实施例中上框架的结构示意图;
15.图3为本实用新型实施例中车轴升降体的结构示意图;
16.图4为图2所示结构的总变形图;
17.图5为图3所示结构的总变形图;
18.图6为图3所示结构等效应力图;
19.图7为图3所示结构体积图;
20.图8为图3所示结构尺寸图;
21.图中:1为滑动杆,2为上框架,3为滑槽,4为斜滑动轴,5为车轮,6为传感器,7为电机,8为车轴,9为连接器,10为连接轴,11为限位器。
具体实施方式
22.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.如图1~3所示,本实用新型提供了一种攀爬飞行两栖机器人机体可升降车轴架,包括车轴8、括滑动杆1、连接器9和斜滑动轴4,机器人机体上设置有固定的滑槽3,所述滑槽方向与车轴8方向平行,滑动杆1的顶端设置在滑槽3内,连接器9滑动设置在滑动杆1上,连接器9上设置有连接轴10,所述斜滑动轴4的一端与车轴8固定连接,另一端套接在所述连接轴10上,所述车轴8的端部设置有车轮5。
24.进一步地,如图1所示,所述的一种攀爬飞行两栖机器人机体可升降车轴架,还包括上框架1,所述上框架1固定设置在机器人机体上,所述滑槽3设置在上框架1上。
25.进一步地,如图3所示,所述车轴8与车轮5之间设置有压力传感器。
26.进一步地,本实施例中, 所述连接器9上设置有与滑动杆1匹配的通孔,所述滑动杆1穿过连接器9上的通孔,并通过限位器11将连接器9限位滑动杆1上。
27.图4~8示出了本实施例提供的可升降车轴架的工作状态数值模拟结果,从结果来看,本实用新型的结构受力均匀,总体变形小,符合使用要求。
28.本实用新型的工作原理如下:在机体通过斜面式障碍时,斜面会对机体产生一个由一个车轮指向一对车轮(一对前车轮或一对后车轮)中另一个车轮的水平分力,本实用新型的沿车轴方向的车轮,车轴,滑动杆,传感器,斜滑动轴,滑动槽,转动电机可视为一个整体结构,所以这个水平分力表现为凹槽中滑动杆的水平移动,减轻对机体固定机构的磨损,起到保护机体,安全越障的目的。
29.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
技术特征:
1.一种攀爬飞行两栖机器人机体可升降车轴架,包括车轴(8),其特征在于,还包括滑动杆(1)、连接器(9)和斜滑动轴(4),机器人机体上设置有固定的滑槽(3),所述滑槽方向与车轴(8)方向平行,滑动杆(1)的顶端设置在滑槽(3)内,连接器(9)滑动设置在滑动杆(1)上,连接器(9)上设置有连接轴(10),所述斜滑动轴(4)的一端与车轴(8)固定连接,另一端套接在所述连接轴(10)上,所述车轴(8)的端部设置有车轮(5)。2.根据权利要求1所述的一种攀爬飞行两栖机器人机体可升降车轴架,其特征在于,还包括上框架(1),所述上框架(1)固定设置在机器人机体上,所述滑槽(3)设置在上框架(1)上。3.根据权利要求1所述的一种攀爬飞行两栖机器人机体可升降车轴架,其特征在于,所述车轴(8)与车轮(5)之间设置有压力传感器。4.根据权利要求1所述的一种攀爬飞行两栖机器人机体可升降车轴架,其特征在于,所述连接器(9)上设置有与滑动杆(1)匹配的通孔,所述滑动杆(1)穿过连接器(9)上的通孔,并通过限位器(11)限位。
技术总结
本实用涉及隧道检测设备技术领域,具体涉及一种攀爬飞行两栖机器人机体可升降车轴架,包括车轴、滑动杆、连接器和斜滑动轴,机器人机体上设置有固定的滑槽,所述滑槽方向与车轴方向平行,滑动杆的顶端设置在滑槽内,连接器滑动设置在滑动杆上,连接器上设置有连接轴,所述斜滑动轴的一端与车轴固定连接,另一端套接在所述连接轴上,所述车轴的端部设置有车轮。本实用新型的结构受力均匀,可以减轻对机体固定机构的磨损,起到保护机体,安全越障的目的。安全越障的目的。安全越障的目的。
技术研发人员:王可心 孙辉 刘文俊 田文茂 宋伟佳 赵振宇 伏浩 胡强 张佳奇 吴树丰 黄亮 王亚利
受保护的技术使用者:中铁十二局集团第二工程有限公司
技术研发日:2021.08.05
技术公布日:2022/2/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1