一种软轴传动手部外骨骼的制作方法
1.本实用新型属于机器人技术领域,具体涉及一种软轴传动手部外骨骼。
背景技术:
2.手部外骨骼是一种模仿人体的手部结构制作的机械装置,可以从外部对人体的手部结构提供保护,并配合人体的手部完成动作。目前,手部外骨骼常应用于仿生模拟的场景下,以模拟使用者对于物体的抓取过程。研究在人们的日常\生活中能够使用的手部外骨骼,以显著改善手功能障碍人群的生活质量。手部外骨骼常见的形式,主要有两种:一种是动力和执行机构一体化,集中在手部;另一种是动力机构和手部执行机构分开,通过线传递动力。第一种方式,一般体积重量都比较大,集中在手部,不利于用户随身携带,一般应用在康复治疗的固定场所;第二种方式,将动力机构分开,可以置放于用户身体的其他部位,使手部负荷减轻,有利于日常生活使用。然而,线传递动力在不同场合会存在各种问题:有时候需要线提供比较大的拉力,需要线比较粗,但线一般通过线轮缠绕的方式来传递动力,缠绕则需要线比较柔软;线的柔软度增加会带来弹性的增加和承载力的降低,进而会削弱拉线动力传递的功能。同时,拉线需要在线轮上不断弯折,线管内来回滑动,拉线的内部破坏和外部磨损不容易控制,进而动力传递的可靠性难以保证。
技术实现要素:
3.有鉴于此,本实用新型的目的是提供一种软轴传动手部外骨骼,以解决现有技术中的不足。
4.为了达到上述目的,本实用新型的目的是通过下述技术方案实现的:
5.提供一种软轴传动手部外骨骼,其包括相互可拆卸式连接的电机驱动机构和手部执行机构,其中:所述电机驱动机构包括壳体、电机、上拆接头、实心软轴和空心软轴,所述电机位于所述壳体内,所述上拆接头连接所述壳体的外端部,所述实心软轴一端穿过所述壳体连接所述电机,另一端穿过所述空心软轴,所述上拆接头连接所述空心软轴;所述手部执行机构包括底座、以及设于所述底座上的手指组件、推杆、丝杠、座台、连接杆、螺母、限位传感器和下拆接头,所述下拆接头通过导线连接所述上拆接头,所述手指组件包括指根、指关节以及弹簧组件,所述弹簧组件用于连接所述指根与指关节以及所述指关节与所述指关节;所述丝杠一端旋转连接于所述座台上,另一端连接所述实心软轴,所述螺母旋转连接于所述丝杠上,所述指根、所述推杆、所述连接杆和所述螺母依次连接,所述限位传感器设于所述连接杆一侧,所述下拆接头连接所述空心软轴,所述底座的底部具有电气连接端。
6.如所述的软轴传动手部外骨骼,所述连接杆为“匚”形,所述连接杆由两根竖杆和一根横杆构成,所述推杆连接所述竖杆的端部,所述螺母连接所述横杆。
7.如所述的软轴传动手部外骨骼,所述弹簧组件包括弹簧片与螺旋弹簧,所述螺旋弹簧环绕所述弹簧片。
8.如所述的软轴传动手部外骨骼,所述弹簧组件的内部以及所述指关节之间设有支
撑块。
9.本实用新型技术方案的有益效果是:
10.‑‑
动力机构和手部执行机构分开,有效减轻手部负荷,方便日常生活使用;
11.‑‑
动力传输机构采用软轴方案,提供更好的动力传递方式,可靠性更高;
12.‑‑
传动装置更简单,减轻了驱动盒体积和质量,方便携带。
附图说明
13.为进一步说明本实用新型的上述目的、结构特点和效果,以下将结合附图对本实用新型进行详细的描述。
14.图1为本实用新型一实施例中的电机驱动机构的结构示意图;
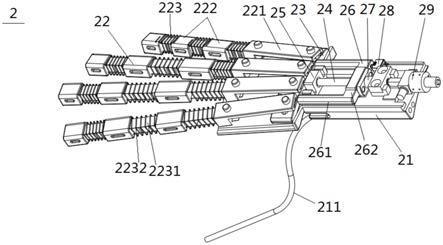
15.图2为本实用新型一实施例中的手部执行机构的结构示意图。
具体实施方式
16.下面结合附图和具体实施例对本实用新型作进一步说明,但不作为本实用新型的限定。
17.参看图1和图2所示,本实用新型软轴传动手部外骨骼包括相互可拆卸式连接的电机驱动机构1和手部执行机构2,电机驱动机构1包括壳体11、电机12、上拆接头13、实心软轴14和空心软轴15,电机12位于壳体11内,上拆接头13连接壳体11的外端部,实心软轴14一端穿过壳体11连接电机12,另一端穿过空心软轴15,上拆接头13连接空心软轴15。手部执行机构2包括底座21、以及设于底座21上的手指组件22、推杆23、丝杠24、座台25、连接杆26、螺母27、限位传感器28和下拆接头29,下拆接头29通过导线(导线在图中未示出)连接上拆接头13,从而实现传递限位传感器28的电信号到外部驱动盒控制板。手指组件22包括指根221、指关节222以及弹簧组件223,弹簧组件223用于连接指根221与指关节222以及指关节222与指关节222。丝杠24一端旋转连接于座台25上,另一端连接实心软轴14,螺母27旋转连接于丝杠24上,指根221、推杆23、连接杆26和螺母27依次连接,限位传感器28设于连接杆26一侧,下拆接头29连接空心软轴15,底座21的底部具有电气连接端211,可为限位传感器28提供电气信号。
18.在本案的优选实施例中,继续参看图示,连接杆26为“匚”形,连接杆26由两根竖杆261和一根横杆262构成,推杆23连接竖杆261的端部,螺母27连接横杆262。
19.手指组件22中的弹簧组件223包括弹簧片2231与螺旋弹簧2232,螺旋弹簧2232环绕弹簧片2231。通常,弹簧片2231为两片相互交叠,但本实用新型不限于此。较佳地,弹簧组件223的内部以及指关节222之间还设有支撑块,在伸展过程中起支撑作用。
20.弹簧片2231不可伸长,只可弯曲。电机12带动丝杠24旋转,从而带动螺母27前后运动:螺母27通过连接杆26带动推杆23推动弹簧片2231上层向前滑动,于是弹簧片2231变形弯曲,带动手指进行弯曲运动;推杆23拉动弹簧片2231上层向后滑动,动手指进行伸展运动,将螺母27在丝杠24上的直线行程转化为手指弯展运动,限位传感器28负责限制推杆23的行程极限位置。
21.本实用新型动力机构和手部执行机构分开,有效减轻手部负荷,方便日常生活使用;动力传输机构采用软轴方案,提供更好的动力传递方式,可靠性更高;传动装置更简单,
减轻了驱动盒体积和质量,方便携带。
22.以上仅为本实用新型较佳的实施例,并非因此限制本实用新型的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本实用新型说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本实用新型的保护范围内。
技术特征:
1.一种软轴传动手部外骨骼,其特征在于,包括相互可拆卸式连接的电机驱动机构(1)和手部执行机构(2),其中:所述电机驱动机构(1)包括壳体(11)、电机(12)、上拆接头(13)、实心软轴(14)和空心软轴(15),所述电机(12)位于所述壳体(11)内,所述上拆接头(13)连接所述壳体(11)的外端部,所述实心软轴(14)一端穿过所述壳体(11)连接所述电机(12),另一端穿过所述空心软轴(15),所述上拆接头(13)连接所述空心软轴(15);所述手部执行机构(2)包括底座(21)、以及设于所述底座(21)上的手指组件(22)、推杆(23)、丝杠(24)、座台(25)、连接杆(26)、螺母(27)、限位传感器(28)和下拆接头(29),所述下拆接头(29)通过导线连接所述上拆接头(13),所述手指组件(22)包括指根(221)、指关节(222)以及弹簧组件(223),所述弹簧组件(223)用于连接所述指根(221)与指关节(222)以及所述指关节(222)与所述指关节(222);所述丝杠(24)一端旋转连接于所述座台(25)上,另一端连接所述实心软轴(14),所述螺母(27)旋转连接于所述丝杠(24)上,所述指根(221)、所述推杆(23)、所述连接杆(26)和所述螺母(27)依次连接,所述限位传感器(28)设于所述连接杆(26)一侧,所述下拆接头(29)连接所述空心软轴(15),所述底座(21)的底部具有电气连接端(211)。2.如权利要求1所述软轴传动手部外骨骼,其特征在于,所述连接杆(26)为“匚”形,所述连接杆(26)由两根竖杆(261)和一根横杆(262)构成,所述推杆(23)连接所述竖杆(261)的端部,所述螺母(27)连接所述横杆(262)。3.如权利要求1所述软轴传动手部外骨骼,其特征在于,所述弹簧组件(223)包括弹簧片(2231)与螺旋弹簧(2232),所述螺旋弹簧(2232)环绕所述弹簧片(2231)。4.如权利要求3所述软轴传动手部外骨骼,其特征在于,所述弹簧组件(223)的内部以及所述指关节(222)之间设有支撑块。
技术总结
本实用新型公开了一种软轴传动手部外骨骼,包括相互可拆卸式连接的电机驱动机构和手部执行机构,电机驱动机构包括电机、上拆接头、实心软轴和空心软轴等,实心软轴穿过空心软轴后连接电机,上拆接头连接空心软轴;手部执行机构包括手指组件、推杆、丝杠、连接杆、螺母、限位传感器和下拆接头等,手指组件包括指根、指关节、弹簧组件,旋转连接有螺母的丝杠连接实心软轴,指根、推杆、连接杆和螺母依次连接,限位传感器设于连接杆一侧,下拆接头连接空心软轴。本实用新型动力机构和手部执行机构分开,有效减轻手部负荷,方便日常生活使用;软轴动力传输提供更好动力传递方式,可靠性更高;传动装置更简单,减轻了驱动盒体积和质量,方便携带。携带。携带。
技术研发人员:许磊
受保护的技术使用者:上海海每康智能医疗科技有限公司
技术研发日:2021.08.09
技术公布日:2022/1/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1