一种便于移动的机器人的机械臂基座的制作方法
1.本实用新型涉及机器人基座技术领域,具体是一种便于移动的机器人的机械臂基座。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
3.传统的机械臂在安装时由于其底座不方便移动,因此需要搬运机械臂进行安装,容易造成对机械臂的损坏,同时也比较费时费力。
4.因此,本领域技术人员提供了一种便于移动的机器人的机械臂基座,以解决上述背景技术中提出的问题。
技术实现要素:
5.本实用新型的目的在于提供一种便于移动的机器人的机械臂基座,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种便于移动的机器人的机械臂基座,包括基座本体、安装槽,所述安装槽位于基座本体的顶部下沉式开设,基座本体的底部设置有围边,基座本体的底部直角处开设有通孔,基座本体的内部对称固定设置有若干组套筒底座,套筒底座的一侧开设螺旋的斜边,套筒底座的斜边一端开设有嵌入槽,套筒底座的底部套入安装有支撑柱,支撑柱的底部安装有万向轮。
8.作为本实用新型再进一步的方案:所述支撑柱的顶端一侧固定设置有限位杆,支撑柱的底部一侧固定设置有推杆,且推杆的一端贯穿通孔并延伸至外部。
9.作为本实用新型再进一步的方案:所述通孔由长方体的基座本体两两侧面互相开设拼接形成,所述支撑柱顶端直径小于底端直径,并在支撑柱的顶端和底端拼接处呈台阶状设置。
10.作为本实用新型再进一步的方案:所述安装槽的内部安装有机械手,机械手的底部套设有固定环。
11.作为本实用新型再进一步的方案:所述固定环和基座本体上分别开设有对应的螺纹孔a和螺纹孔b,固定环的内圈与机械手的底部的台阶处互相嵌合安装。
12.作为本实用新型再进一步的方案:所述基座本体的一端内部通过螺栓安装有密封板,基座本体的内部固定安装有电动吸盘,基座本体的一侧设置有插接口。
13.作为本实用新型再进一步的方案:所述安装槽整体呈“u”形开设,所述基座本体通过固定螺母与外部设备固定安装。
14.与现有技术相比,本实用新型的有益效果是:
15.1、通过设置有套筒底座、限位杆、斜边、推杆,在安装时可以将基座本体一侧稍微抬起,转动推杆使其延斜边卡入嵌入槽内部,使万向轮的接触地面,按上述操作转动基座本体另一侧的推杆,使四组万向轮接触地面,从而实现基座本体的整体移动,方便与机械手的安装。
16.2、通过设置有安装槽、固定环在与基座本体安装机械手时可以通过固定环,加固机械手与基座本体安装牢固性,设置的密封板在对基座本体内部维修时,避免需要拆卸基座本体。
附图说明
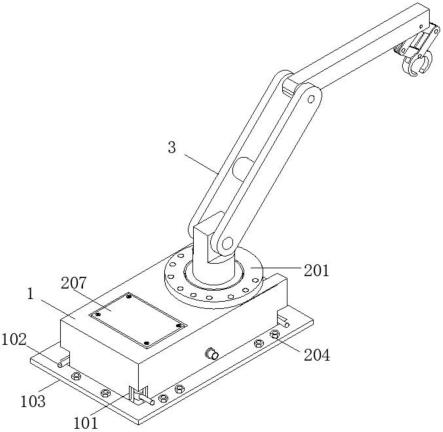
17.图1为一种便于移动的机器人的机械臂基座的整体结构示意图;
18.图2为一种便于移动的机器人的机械臂基座的整体装配示意图;
19.图3为一种便于移动的机器人的机械臂基座的套筒底座和支撑柱装配视图。
20.图中:1、基座本体;101、通孔;102、推杆;103、围边;104、套筒底座;105、斜边;106、嵌入槽;107、支撑柱;108、万向轮;2、安装槽;201、固定环;202、螺纹孔a;203、螺纹孔b;204、固定螺母;205、插接口;206、电动吸盘;207、密封板;3、机械手。
具体实施方式
21.请参阅图1~3,本实用新型实施例中,一种便于移动的机器人的机械臂基座,包括基座本体1、安装槽2,安装槽2位于基座本体1的顶部下沉式开设,基座本体1的底部设置有围边103,基座本体1的底部直角处开设有通孔101,基座本体1的内部对称固定设置有若干组套筒底座104,套筒底座104的一侧开设螺旋的斜边105,套筒底座104的斜边105一端开设有嵌入槽106,套筒底座104的底部套入安装有支撑柱107,支撑柱107的底部安装有万向轮108,安装槽2的内部安装有机械手3,机械手3的底部套设有固定环201,基座本体1的一端内部通过螺栓安装有密封板207,基座本体1的内部固定安装有电动吸盘206,基座本体1的一侧设置有插接口205,安装时可以通过电动吸盘206对基座本体1进行预安装,保证后续安装的精确性。
22.如图1和图2所示,支撑柱107的顶端一侧固定设置有推杆102,推杆102的一端贯穿通孔101并延伸至外部,方便从基座本体1外部操作。
23.如图3所示,通孔101由长方体的基座本体1两两侧面互相开设拼接形成,支撑柱107顶端直径小于底端直径,并在支撑柱107的顶端和底端拼接处呈台阶状设置,且套筒底座104套设在支撑柱107的顶端转动安装,转动后通过万向轮108对基座本体1形成支撑效果。
24.如图1和图2所示,固定环201和基座本体1上分别开设有对应的螺纹孔a202和螺纹孔b203,固定环201的内圈与机械手3的底部的台阶处互相嵌合安装,使机械手3与基座本体1安装时更加牢固。
25.如图1和图2所示,安装槽2整体呈“u”形开设,基座本体1通过固定螺母204与外部设备固定安装,增加安装牢固性。
26.本实用新型的工作原理是:使用时可以将基座本体1一侧稍微抬起,转动推杆102
使其延斜边105卡入嵌入槽106内部,使万向轮108的接触地面,按上述操作转动基座本体1另一侧的推杆102,使四组万向轮108接触地面形成支撑效果,从而实现基座本体1的整体移动,方便与机械手3的安装,在与基座本体1安装机械手3时,将机械手3底部放置在安装槽2,套入固定环201,通过螺栓配合螺纹孔a202和螺纹孔b203使机械手3与基座本体1安装牢靠,该实施方式具体解决了传统的机械臂底座不方便安装的问题。
27.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种便于移动的机器人的机械臂基座,包括基座本体(1)、安装槽(2),其特征在于:所述安装槽(2)位于基座本体(1)的顶部下沉式开设,基座本体(1)的底部设置有围边(103),基座本体(1)的底部直角处开设有通孔(101),基座本体(1)的内部对称固定设置有若干组套筒底座(104),套筒底座(104)的一侧开设螺旋的斜边(105),套筒底座(104)的斜边(105)一端开设有嵌入槽(106),套筒底座(104)的底部套入安装有支撑柱(107),支撑柱(107)的底部安装有万向轮(108)。2.根据权利要求1所述的一种便于移动的机器人的机械臂基座,其特征在于,所述支撑柱(107)的顶端一侧固定设置有推杆(102),推杆(102)的一端贯穿通孔(101)并延伸至外部。3.根据权利要求1所述的一种便于移动的机器人的机械臂基座,其特征在于,所述通孔(101)由长方体的基座本体(1)两两侧面互相开设拼接形成,所述支撑柱(107)顶端直径小于底端直径,并在支撑柱(107)的顶端和底端拼接处呈台阶状设置,且套筒底座(104)套设在支撑柱(107)的顶端转动安装。4.根据权利要求1所述的一种便于移动的机器人的机械臂基座,其特征在于,所述安装槽(2)的内部安装有机械手(3),机械手(3)的底部套设有固定环(201)。5.根据权利要求4所述的一种便于移动的机器人的机械臂基座,其特征在于,所述固定环(201)和基座本体(1)上分别开设有对应的螺纹孔a(202)和螺纹孔b(203),固定环(201)的内圈与机械手(3)的底部的台阶处互相嵌合安装。6.根据权利要求1所述的一种便于移动的机器人的机械臂基座,其特征在于,所述基座本体(1)的一端内部通过螺栓安装有密封板(207),基座本体(1)的内部固定安装有电动吸盘(206),基座本体(1)的一侧设置有插接口(205)。7.根据权利要求1所述的一种便于移动的机器人的机械臂基座,其特征在于,所述安装槽(2)整体呈“u”形开设,所述基座本体(1)通过固定螺母(204)与外部设备固定安装。
技术总结
本实用新型公开了一种便于移动的机器人的机械臂基座,涉及机器人基座技术领域,传统的机械臂在安装时由于其底座不方便移动,因此需要搬运机械臂进行安装,容易造成对机械臂的损坏,同时也比较费时费力,包括基座本体、安装槽,所述安装槽位于基座本体的顶部下沉式开设,基座本体的底部设置有围边,基座本体的底部直角处开设有通孔,基座本体的内部对称固定设置有若干组套筒底座,通过设置有套筒底座、限位杆、斜边、推杆,在安装时可以将基座本体一侧稍微抬起,转动推杆使其延斜边卡入嵌入槽内部,使万向轮的接触地面,按上述操作转动基座本体另一侧的推杆,使四组万向轮接触地面,从而实现基座本体的整体移动,方便与机械手的安装。装。装。
技术研发人员:付树艳 孔凡冬 裴晓宇
受保护的技术使用者:常州常珏精密机械科技有限公司
技术研发日:2021.12.17
技术公布日:2022/9/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1