一种无人配餐复合机器人的制作方法
1.本实用新型属于机器人技术领域,具体涉及一种无人配餐复合机器人。
背景技术:
2.现有技术中很多都是通过人工进行配餐,尤其是一些处于封闭隔离区域的人员,如果通过人工进行配餐成本较高,且在配餐的过程中,也容易交叉感染。
3.现在随着机器人的流行,所以配餐过程可以通过机器人完成,所以急需研究一种可以代替人工进行配餐的机器人以解决上述技术问题。
技术实现要素:
4.本申请实施例的目的在于提供一种无人配餐复合机器人,用以解决或缓解上述一个或者部分技术问题。
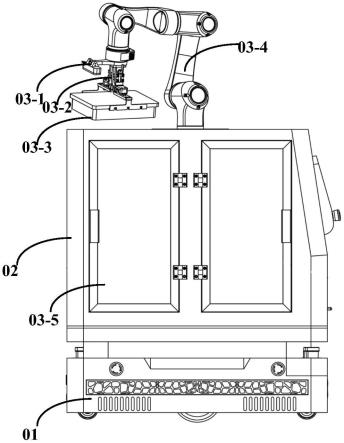
5.为实现上述目的,本申请实施例提供了一种无人配餐复合机器人,所述机器人包括:自动导引运输车,储餐机构和抓取机构,所述储料机构设置于自动导引运输车上方,所述抓取机构设置在储餐机构上方且与自动导引运输车连接;
6.所述储餐机构中设置有传动机构,滑轨组件,放置板和驱动机构,所述传动机构贯穿所述放置板,所述传动机构两端分别与所述驱动机构和所述储餐机构连接,所述驱动机构与所述自动导引运输车连接;
7.所述滑轨组件设置在所述储餐机构的内侧壁上,所述放置板两侧分别与所述滑轨组件滑动连接,所述驱动机构带动所述传动机构运动进而带动放置板在滑轨组件中运动,所述抓取机构用于抓取放置板上的餐食以放置至目标位置。
8.作为本申请一优选实施例,所述储餐机构中还设置有导向组件,所述导向组件两端分别与储餐机构底板和顶板连接,所述导向组件贯穿所述放置件,且与传动组件平行设置。
9.作为本申请一优选实施例,所述传动机构远离驱动机构的一端通过轴承与顶板连接。
10.作为本申请一优选实施例,导向组件包括两个导向件,两个所述导向件分布在所述传动机构的两侧。
11.作为本申请一优选实施例,所述放置板分别与所述传动机构和导向组件垂直设置。
12.作为本申请一优选实施例,所述放置板上设置有滑块,所述滑块在所述滑轨组上滑动以带动放置板运动。
13.作为本申请一优选实施例,所述放置板包括固定板和放置组件,所述放置组件与所述固定板连接,所述滑块设置在所述固定板上。
14.作为本申请一优选实施例,所述放置组件包括四个放置件,其中两个放置件设置在传动机构一侧,另外两个所述放置件设置在传动机构的另一侧。
3后,将餐食03-3放置到指定位置,餐食03-3完成配送后,工控机控制机械臂03-4恢复到原来位置,取餐口关闭,在配送过程中,将最上层的餐食配送到指定位置后,工控机控制驱动机构02-8驱动传动机构02-4旋转,传动机构02-4的旋转运动带动放置件02-6直线向上运动到指定位置,工控机再一次控制机械臂03-4到达指定位置,通过夹具03-2夹取餐食03-3后,将餐食03-3放置到指定位置,直到餐储机构02中的餐食配送完毕。
27.在本申请实施例中,传动机构02-4可以为丝杆,所述丝杆上设置有螺母02-10,所述放置件02-6与螺母02-10连接,将丝杆的旋转运动转换为放置件02-6的上下直线运动,具体放置件02-6向上运动还是向下运动主要取决于驱动机构02-8,本申请实施例中,驱动机构02-8可以为电机,比如电机正转,放置件02-6上移;电机反转,放置件02-6下移。
28.为了方便放置件02-6上下运动,减少摩擦,放置件02-6两侧在滑轨02-5组件上滑动,在本申请实施例中,滑轨组件包括两个滑轨02-5,两个滑轨02-5分别设置在储餐机构02两侧的内侧壁上,所述驱动机构02-8带动所述传动机构02-4运动进而带动放置板02-6在滑轨02-5组件中运动。
29.所述储餐机构02中还设置有导向组件,所述导向组件两端分别与储餐机构底板和顶板02-1连接,所述导向组件贯穿所述放置件02-6,且与传动机构02-4平行设置,导向组件与传动机构02-4处于同一个平面上,导向组件和传动机构02-4均竖直设置在餐储机构02中,在本申请实施例中,导向组件包括两个导向件02-3,两个所述导向件02-3分布在所述传动机构02-4的两侧,导向件02-3可以实现放置件02-6的导向作用,这样可以保证放置件02-6沿着规定路线移动,放置板02-6分别与所述传动机构02-4和导向组件垂直设置。
30.为了实现传动机构02-4与餐储机构顶板02-1之间的相对转动,所述传动机构02-4远离驱动机构02-8的一端通过轴承02-4与顶板02-1连接。
31.所述放置板02-6包括固定板02-7和放置组件,所述放置组件与所述固定板02-7连接,所述滑块02-9设置在所述固定板02-7上,所述放置板02-6上设置有滑块02-9,所述滑块02-9在所述滑轨02-5上滑动以带动放置板02-6运动。
32.所述放置组件包括四个放置件02-6,其中两个放置件02-6设置在传动机构02-4一侧,另外两个所述放置件02-6设置在传动机构02-4的另一侧。
33.为了方便向餐储机构中放置餐食03-3,所述储餐机构02侧面设置有仓门03-5。
34.虽然,本文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
技术特征:
1.一种无人配餐复合机器人,其特征在于,包括:自动导引运输车,储餐机构和抓取机构,所述储餐机构设置于自动导引运输车上方,所述抓取机构设置在储餐机构上方且与自动导引运输车连接;所述储餐机构中设置有传动机构,滑轨组件,放置板和驱动机构,所述传动机构贯穿所述放置板,所述传动机构两端分别与所述驱动机构和所述储餐机构连接,所述驱动机构与所述自动导引运输车连接;所述滑轨组件设置在所述储餐机构的内侧壁上,所述放置板两侧分别与所述滑轨组件滑动连接,所述驱动机构带动所述传动机构运动进而带动放置板在滑轨组件中运动,所述抓取机构用于抓取放置板上的餐食以放置至目标位置。2.如权利要求1所述的一种无人配餐复合机器人,其特征在于,所述储餐机构中还设置有导向组件,所述导向组件两端分别与储餐机构底板和顶板连接,所述导向组件贯穿放置件,且与传动组件平行设置。3.如权利要求2所述的一种无人配餐复合机器人,其特征在于,所述传动机构远离驱动机构的一端通过轴承与顶板连接。4.如权利要求2或3所述的一种无人配餐复合机器人,其特征在于,导向组件包括两个导向件,两个所述导向件分布在所述传动机构的两侧。5.如权利要求4所述的一种无人配餐复合机器人,其特征在于,所述放置板分别与所述传动机构和导向组件垂直设置。6.如权利要求4所述的一种无人配餐复合机器人,其特征在于,所述放置板上设置有滑块,所述滑块在所述滑轨组件上滑动以带动放置板运动。7.如权利要求6所述的一种无人配餐复合机器人,其特征在于,所述放置板包括固定板和放置组件,所述放置组件与所述固定板连接,所述滑块设置在所述固定板上。8.如权利要求7所述的一种无人配餐复合机器人,其特征在于,所述放置组件包括四个放置件,其中两个放置件设置在传动机构一侧,另外两个所述放置件设置在传动机构的另一侧。9.如权利要求8所述的一种无人配餐复合机器人,其特征在于,所述抓取机构包括机械臂,夹具和图像获取装置;所述机械臂末端分别与所述夹具和图像获取装置,所述图像获取装置用于获取餐食放置位置图像以便对餐食进行定位,进而控制机械臂通过夹具夹取餐食。10.如权利要求1所述的一种无人配餐复合机器人,其特征在于,所述储餐机构侧面设置有仓门。
技术总结
本申请实施例提供的无人配餐复合机器人,此机器人包括自动导引运输车,储餐机构和抓取机构,所述储料机构设置于自动导引运输车上方,所述抓取机构设置在储餐机构上方且与自动导引运输车连接;所述储餐机构中设置有传动机构,滑轨组件,放置板和驱动机构,所述驱动机构带动所述传动机构运动进而带动放置板在滑轨组件中运动,所述抓取机构用于抓取放置板上的餐食以放置至目标位置。本申请可以实现自动配送餐食,无需人工完成餐食配送,节省了人工成本和交叉感染。本和交叉感染。本和交叉感染。
技术研发人员:王仁伟 路红艳 徐丹 王君 周俊辉 王光能 张国平
受保护的技术使用者:深圳市牛耳机器人有限公司
技术研发日:2021.12.27
技术公布日:2022/7/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1