一种站桩车机器人的制作方法
1.本实用新型涉及一种机器人,具体涉及一种站桩车机器人。
背景技术:
2.站桩原指人的身体如木桩站立不动,目的在于如木桩有根稳定,而非不动傻站。在工业机器人应用场景常需要机器人用于仓库货品的堆放,物流货物的摆放,码头货物的接收等等,这些场景需要机器人即能移动,又能在停止时稳如泰山。
3.因此一种即能移动,停止时又需要稳如泰山的机器人的开发就需要提上日程。
技术实现要素:
4.本实用新型的目的就是为了解决现有机器人场景的需要,提供了即需要移动又需要停止时稳如泰山的一种站桩车机器人。
5.本实用新型所要解决问题的技术方案如下:
6.一种站桩车机器人,其特征在于:包括根据使用场地大小按间距排布的枕轨,铺设固定于枕轨上的若干条导轨,在其中一导轨上方设有齿条;一立柱的底部通过滑块扣于安装有工字滑轨的导轨上,立柱一侧安装有立柱移动伺服电机,立柱移动伺服电机的输出端装有轮齿啮合于齿条上;在所述立柱的顶端侧边安装有连接机器臂的悬臂架。
7.优选地,所述悬臂架包括底座以及供机器臂安装的悬臂座,所述底座内设有一升降伺服电机,底座外侧设有升降滑块,升降滑块所对应立柱表面设有与供升降滑块卡入供其滑动的升降轨道,在升降轨道的一侧安装一升降齿条,所述升降伺服电机的输出端贯穿底座底部且套有升降轮齿啮合于升降齿条上。
8.优选地,所所述立柱内设有为立柱移动伺电机供电的控制电路,该控制电路设有无线模块。
9.本实用新型的有益效果如下:
10.本实用新型通过在使用场所按间距排布枕轨,在枕轨上铺设固定导轨,再在导轨上安装立柱并由立柱移动伺服电机驱动进行移动,枕轨提供导轨在场所地面的固定再加上立柱移动伺服电机的自锁功能可以在立柱移动精准距离之后停止并能使立柱稳如泰山犹如站桩。
附图说明:
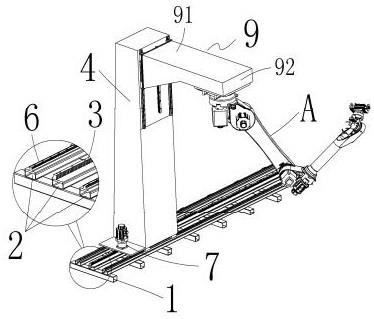
11.图1是本实用新型的结构示意图;
12.图2是本实用新型去部分结构示意图;
13.图3是图1另一角度的结构示意图。
具体实施方式:
14.下面结合附图对本实用新型作进一步详细的阐述。
15.参阅图1至图3,一种站桩车机器人,包括根据使用场地大小按间距排布的枕轨1,铺设固定于枕轨1上的若干条导轨2,在其中一导轨上方设有齿条3;一立柱4的底部通过滑块5扣于安装有工字滑轨6的导轨上,立柱4一侧安装有立柱移动伺服电机7,立柱移动伺服电机7的输出端装有轮齿8啮合于齿条3上;在所述立柱4的顶端侧边安装有连接机器臂a的悬臂架9。
16.在本实施例实施时,枕轨1通过螺栓固定于使用场地预设地面上,导轨2 可通过螺栓固定于枕轨1上,亦可通过焊接固定于枕轨上。枕轨1的数量按照场地大小按排,通常两根枕轨间距为立柱4的一个底部大小至两个底部大小之间。滑块5由两部分组成,一部分通过螺栓固定在立柱4底部,另一部分与工字滑轨 6的剖面匹配,可卡在工字滑轨6的两侧凹槽内,即可起到导向又可防止滑块5 从工字滑轨6脱轨。
17.立柱移动伺服电机7的正反转动通过啮合齿条即可带动立柱4在工字滑轨6 的导轨上前后精准距离的移动。另外,移动伺服电机的自锁功能可以在立柱停止后使立柱稳如泰山。
18.在实施时,为了方便枕轨1上安装导轨2,在枕轨1上可设置槽口,导轨2 铺于槽内即可完成多个枕轨相对应导轨2的位置的定位,之后再将枕轨1固定于地面上即可。
19.另外,在后期实施时,所述导轨2可以按照使用场地要求采用弯轨,工字滑轨6、滑块5可进行适配的修改以适应导轨2的轨体变形,用于使站桩机器人适应一些场地要求。
20.进一步,作为对本实用新型的改进,所述悬臂架9包括底座91以及供机器臂安装的悬臂座92,所述底座91内设有一升降伺服电机93,底座91外侧设有升降滑块94,升降滑块94所对应立柱4表面设有与供升降滑块94卡入供其滑动的升降轨道95,在升降轨道95的一侧安装一升降齿条96,所述升降伺服电机93的输出端贯穿底座91底部且套有升降轮齿97啮合于升降齿条96上。
21.在本实施例实施时,该底座91由一剖面呈梯形的壳体组成,该壳体梯形面的下底对应着底座91与立柱4接触的一面,这样壳体梯形面的腰可以将安装了机器臂a的悬臂座92受力转向立柱4表面设置的降轨道95上。
22.升降伺服电机93通过升降轮齿97啮合于升降齿条96可以精准进行悬臂架 9的上升以及下降,还有升降伺服电机93通过自锁功能稳定悬臂架9在立柱4 上的定位。
23.上述结构的设置可以扩展机器臂a在垂直方向上的工位范围。
24.进一步,作为对本实用新型的改进,所述立柱4内设有为立柱移动伺电机7 供电的控制电路(图未示),该控制电路设有无线模块。
25.在实施时,通过无线模块,工作人员可通过pc或移动端对立柱移动伺电机 7的供电控制电路进行控制,以达到在操作室就可以控制站桩车的移动以及工位的按排。
技术特征:
1.一种站桩车机器人,其特征在于:包括根据使用场地大小按间距排布的枕轨,铺设固定于枕轨上的若干条导轨,在其中一导轨上方设有齿条;一立柱的底部通过滑块扣于安装有工字滑轨的导轨上,立柱一侧安装有立柱移动伺服电机,立柱移动伺服电机的输出端装有轮齿啮合于齿条上;在所述立柱的顶端侧边安装有连接机器臂的悬臂架。2.根据权利要求1所述的一种站桩车机器人,其特征在于:所述悬臂架包括底座以及供机器臂安装的悬臂座,所述底座内设有一升降伺服电机,底座外侧设有升降滑块,升降滑块所对应立柱表面设有与供升降滑块卡入供其滑动的升降轨道,在升降轨道的一侧安装一升降齿条,所述升降伺服电机的输出端贯穿底座底部且套有升降轮齿啮合于升降齿条上。3.根据权利要求1所述的一种站桩车机器人,其特征在于:所述立柱内设有为立柱移动伺电机供电的控制电路,该控制电路设有无线模块。
技术总结
一种站桩车机器人,包括根据使用场地大小按间距排布的枕轨,铺设固定于枕轨上的若干条导轨,在其中一导轨上方设有齿条;一立柱的底部通过滑块扣于安装有工字滑轨的导轨上,立柱一侧安装有立柱移动伺服电机,立柱移动伺服电机的输出端装有轮齿啮合于齿条上;在所述立柱的顶端侧边安装有连接机器臂的悬臂架。本实用新型通过枕轨提供导轨在场所地面的固定再加上立柱移动伺服电机的自锁功能可以在立柱移动精准距离之后停止并能使立柱稳如泰山犹如站桩。站桩。站桩。
技术研发人员:刘文甫
受保护的技术使用者:河北中电信普智能科技有限公司
技术研发日:2022.01.22
技术公布日:2022/6/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1