一种三维直角机器人实训平台的制作方法
1.本实用新型涉及机器人和机器视觉教学领域,具体涉及一种三维直角机器人实训平台。
背景技术:
2.进入21世纪以来,机器人和机器视觉技术不断发展,应用范围不断拓宽。直角机器人作为一种成本低、系统结构简单的自动化机器人系统解决方案,被应用于各种工业生产领域,替代人工,提高生产效率。
3.直角机器人(也称直角坐标机器人)是指能够实现自动控制的、可重复编程的、多自由度建成空间直角关系的、多用途的操作机,其又被称为大型的直角坐标机器人。然而现有的直角机器人不利于教学和实训,因此有必要设计一种适于教学的三维直角机器人。
技术实现要素:
4.为解决现有技术存在的问题,本实用新型提出一种三维直角机器人实训平台,其结合机器人和机器视觉,既符合工业实际要求,又适于教学和实训,能有效训练学员的相关技能。
5.为实现上述目的,本实用新型的三维直角机器人实训平台包括底座、工件平台、机器视觉支架、摄像头、坦克链机构、xyz线性模组,工件平台安装在底座上,机器视觉支架设置在底座的一侧,且延伸至底座的上方,摄像头安装在机器视觉支架上,且位于底座的上方,坦克链机构和xyz线性模组设置在底座的另一侧,底座内形成一个腔室,腔室内设置伺服驱动器、运动控制器、开关电源、空气开关、自复熔断器,伺服驱动器、运动控制器、开关电源、空气开关、自复熔断器靠近底座的端面,底座的端面上设置操作面板。
6.进一步地,操作面板上安装若干个信号端子和按键。
7.进一步地,底座为具有底板的u型框架结构,底座的两个侧壁的上边缘连接导轨,用于与工件平台配合,将工件平台安装至底座。
8.进一步地,机器视觉支架包括竖杆和横杆,竖杆竖立在底座的一侧,横杆位于底座的上方,横杆的一端与竖杆连接。
9.进一步地,竖杆和横杆均由两个连杆组装而成,两个连杆通过螺纹连接,使得竖杆和横杆的长度可调节。
10.进一步地,竖杆和横杆均为空心杆,摄像头的电源线和信号线穿过竖杆和横杆的中心孔。
11.本实用新型的三维直角机器人实训平台具有如下有益效果:
12.(1)本实用新型将机器视觉和机器人技术相结合,既符合工业实际要求,又提供了便于教学的直角机器人实训平台;
13.(2)本实用新型将电气模块和机械模块结合在一起,形成一体式直角机器人,不需要另外的线缆连接,方便运输和维护;
14.(3)实训平台的视觉支架的高度和长度可调,通用性强,工件平台通过导轨安装至底座上,方便根据实训内容更换工件平台;
15.(4)实训平台的空气开关具有短路、过载保护功能,自复熔断器可以在短路时限制电流,待短路消失后,又恢复正常的导电状态,既能保护设备和人员安全,又无需更换熔体,可重复使用。
附图说明
16.下面结合附图对本实用新型作进一步描写和阐述。
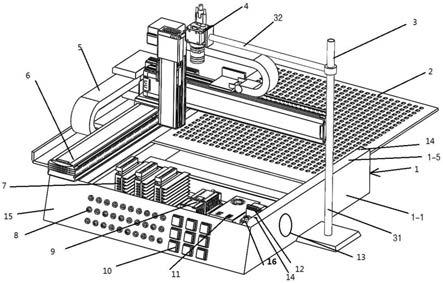
17.图1是本实用新型首选实施方式的三维直角机器人实训平台的示意图。
18.图2是图1中实训平台的机器视觉支架的局部示意图。
具体实施方式
19.下面将结合附图、通过对本实用新型的优选实施方式的描述,更加清楚、完整地阐述本实用新型的技术方案。
20.如图1所示,本实用新型首选实施方式的三维直角机器人实训平台包括底座1、工件平台2、机器视觉支架3、摄像头4、坦克链机构5和xyz线性模组6。
21.工件平台2安装在底座1上。具体地,底座1为具有底板的u型框架结构,底座1的两个侧壁1-1的上边缘连接导轨1-5,用于与工件平台2配合,工件平台2的两侧沿着导轨1-5滑动,即可安装至底座1上。
22.机器视觉支架3设置在底座1的一侧,且延伸至底座1的上方,摄像头4安装在机器视觉支架3上。具体地,机器视觉支架3包含竖杆31和横杆32,竖杆31竖立在底座1的一侧,横杆32位于底座1的上方,其一端与竖杆31连接。
23.如图2所示,竖杆31和横杆32均由两个连杆301、302组装而成,两个连杆301、302通过螺纹连接,通过旋紧或旋松可以调节竖杆31和横杆32的长度,也就实现了机器视觉支架3的高度调节和长度调节。
24.竖杆31和横杆32均为空心杆,这样的设计使得摄像头4的电源线和信号线可以穿过竖杆和横杆的中心孔,便于收纳线缆。摄像头4优选为型号mcd-019的ccd摄像头。
25.坦克链机构5和xyz线性模组6设置在底座1的另一侧,与机器视觉支架的竖杆31相对。优选地,xyz线性模组6的采用型号为fsl40线性模组。
26.底座1内形成一个腔室,腔室内设置伺服驱动器7、运动控制器9、开关电源11、空气开关12、自复熔断器16。其中,空气开关12可以对电路或电气设备发生的短路、严重过载及欠电压等进行保护。自复熔断器16在电路发生短路或者过载的情况时,其温度上升呈现高阻态,从而限制电流,当短路电流消失后,自复熔断器16的温度下降,又恢复正常导电性能,在防止发生意外的同时,又不需要更换熔体,且能重复使用。优选地,伺服驱动器7的型号为110-g04030+a3n-td,运动控制器9的型号为tc55-3,开关电源11的型号为lrs-50-24),空气开关12的型号为ea9rn2c6330c,自复熔断器16的型号为rt18。
27.底座1的一个侧壁上还安装通风扇13,用于降低腔室内的温度。
28.底座1的端面上设置操作面板15,其上安装若干个信号端子8和按键10,便于用户根据实训要求,选择对应的按键和信号端子。优选地,信号端子的型号为bncg/m-01。
29.上述具体实施方式仅仅对本实用新型的优选实施方式进行描述,而并非对本实用新型的保护范围进行限定。在不脱离本实用新型设计构思和精神范畴的前提下,本领域的普通技术人员根据本实用新型所提供的文字描述、附图对本实用新型的技术方案所作出的各种变形、替代和改进,均应属于本实用新型的保护范畴。本实用新型的保护范围由权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1