一种车载MEMS激光雷达的角度放大光学系统的制作方法
一种车载mems激光雷达的角度放大光学系统
技术领域
1.本发明涉及一种车载激光雷达,尤其是涉及一种车载激光雷达的角度放大光学系统。
背景技术:
2.激光雷达是实现高级别自动驾驶和车路协同的核心传感器。随着汽车安全驾驶系统的应用及普及,激光雷达应用于前车碰撞的预警需求也越来越多。现有的机械旋转式激光雷达在成本、环境适应性和可靠性等方面难以满足规模化车载应用的问题。研制mems(微机电扫描镜)成像激光雷达,是近几年国际上激光雷达发展的主流技术方案之一。但是mems扫描镜的扫描角度较小,一般在25度左右。
技术实现要素:
3.本发明所要解决的技术问题是提供一种应用于车载激光雷达角度放大光学系统,该光学系统能够实现3.75倍左右的角放大倍率。
4.本发明解决上述技术问题所采用的技术方案为:一种车载mems激光雷达的角度放大光学系统,由从物侧到像侧依次设置的前透镜组、中一透镜组、中二透镜组和后透镜组组成,所述的前透镜组具有正光焦度,所述的中一透镜组具有负光焦度,所述的中二透镜组具有正光焦度,所述的前透镜组、所述的中一透镜组和所述的中二透镜组三者组合成的焦距f’具有正光焦度,且满足:115>∣f’∣>90,所述的后透镜组具有负光焦度,所述的后透镜组的焦距f
后
满足:37>∣f
后
∣>29。
5.所述的前透镜组由光焦度为负的第一透镜和光焦度为正的第二透镜胶合构成,所述的中一透镜组由光焦度为负的第三透镜、光焦度为正的第四透镜和光焦度为负的第五透镜胶合构成,所述的中二透镜组由光焦度为正的第六透镜、光焦度为负的第七透镜和光焦度为正的第八透镜胶合构成,所述的后透镜组由光焦度为负的第九透镜构成。
6.所述的前镜组由光焦度为正的第一透镜构成,所述的中一透镜组由光焦度为负的第二透镜构成,所述的中二镜组由光焦度为正的第三透镜、光焦度为负的第四透镜和光焦度为正的第五透镜构成,所述的后透镜组由光焦度为负的第六透镜构成。
7.所述的中二透镜组为双凸透镜组。
8.所述的后透镜组的物侧为凹面,像侧为凸面或平面。
9.与现有技术相比,本发明的优点在于通过4镜组的设计,搭配合理的光焦度,通过合理地参数匹配,能够使φ5mm平行入射的光斑经过此光学系统后,各个视场角的光斑均匀,大小一致,且有较高的准直性,并且光斑面积不大于原光斑面积,并实现3.75倍左右的角放大倍率,将扫描角度由24度左右扩大到90度左右。
附图说明
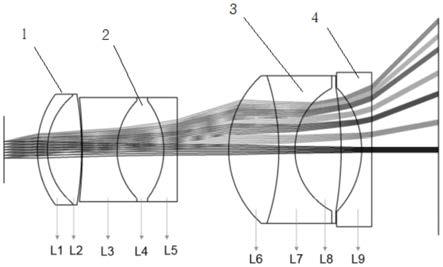
10.图1是本发明实施例1的光学结构图;
11.图2是本发明实施例1的光斑图;
12.图3是本发明实施例1的畸变图;
13.图4是本发明实施例2的光学结构图;
14.图5是本发明实施例2的光斑图;
15.图6是本发明实施例2的畸变图。
具体实施方式
16.以下结合附图实施例对本发明作进一步详细描述。
17.在本说明书中,第一、第二、第三等表述仅用于将一个特征与另一个特征区分开,不代表对特征作任何限制。
18.在本文中,除非另外限定,否则本文所使用的所有用语(包括科学用语与技术用语)均具有与本申请所属领域普通技术人员的通常理解相同的含义。
19.在本文中,除非另外限定,所有用语应被解释为具有与它们在相关技术的上下文的含义一致的含义,而不被过度地或理想化地正式意义的解释。
20.以下对本申请的特征、原理和其他方面进行详细描述
21.下面结合附图,具体阐明本发明的实施方式,附图仅供参考和说明使用,不构成对本发明专利保护范围的限制。
22.实施例1:
23.如图1所示,入射角为24度的平行光从光阑g入射到本发明的角度放大光学系统,角度放大光学系统从物侧到像侧依次为由光焦度为负的第一透镜l1与光焦度为正的第二透镜2胶合构成的前透镜组1;由光焦度为负的第三透镜l3、光焦度为正的第四透镜ll4和光焦度为负的第五透镜l5胶合构成的中一透镜组2;由光焦度为正的第六透镜l6、光焦度为负的第七透镜l7和光焦度为正的第八透镜l8胶合构成的中二透镜组3,由光焦度为负的第九透镜l9构成的后透镜组4。
24.本实施例中,前透镜组1、中一透镜组2、中二透镜组3、后透镜组4均为球面透镜。
25.本实施例的主要设计参数见下表:
[0026][0027]
本实施例中,整个镜头的物理光学参数如下表示
[0028][0029][0030]
本发明实施例采用九片式结构,实现入射视场角由24度扩大到90度,角放大倍率约为3.75倍。本实施例中,前透镜组1、中一透镜组2、中二透镜组3、后透镜组4也可以是非球面透镜组。
[0031]
实施例2:
[0032]
如图4所示,入射角为24度的平行光从光阑g入射到本发明的角度放大光学系统,
角度放大光学系统从物侧到像侧依次为由光焦度为正的第一透镜l1构成前镜组10;由光焦度为负的第二透镜l2构成中一透镜组20;由光焦度为正的第三透镜l3、光焦度为负的第四透镜l4和光焦度为正的第五透镜l5构成中二镜组30;由光焦度为负的第六透镜l6构成后透镜组40。
[0033]
本实施例中,前透镜组10、中一透镜组20、中二透镜组30、后透镜组40均为球面透镜,也可为非球面镜片。
[0034]
本实施例的主要设计参数见下表:
[0035][0036]
本实施例中,整个镜头的物理光学参数如下表示
[0037][0038]
[0039]
本发明实施例采用六片式结构,实现入射视场角由24度扩大到90度,角放大倍率约为3.75倍。上述实施例中可以看出,由于整个系统是近似无限远系统,焦平面很远,因此并不需要限定光学总长。
技术特征:
1.一种车载mems激光雷达的角度放大光学系统,其特征在于由从物侧到像侧依次设置的前透镜组、中一透镜组、中二透镜组和后透镜组组成,所述的前透镜组具有正光焦度,所述的中一透镜组具有负光焦度,所述的中二透镜组具有正光焦度,所述的前透镜组、所述的中一透镜组和所述的中二透镜组三者组合成的焦距f’具有正光焦度,且满足:115>∣f’∣>90,所述的后透镜组具有负光焦度,所述的后透镜组的焦距f
后
满足:37>∣f
后
∣>29。2.如权利要求1所述的一种车载mems激光雷达的角度放大光学系统,其特征在于所述的前透镜组由光焦度为负的第一透镜和光焦度为正的第二透镜胶合构成,所述的中一透镜组由光焦度为负的第三透镜、光焦度为正的第四透镜和光焦度为负的第五透镜胶合构成,所述的中二透镜组由光焦度为正的第六透镜、光焦度为负的第七透镜和光焦度为正的第八透镜胶合构成,所述的后透镜组由光焦度为负的第九透镜构成。3.如权利要求1所述的一种车载mems激光雷达的角度放大光学系统,其特征在于所述的前镜组由光焦度为正的第一透镜构成,所述的中一透镜组由光焦度为负的第二透镜构成,所述的中二镜组由光焦度为正的第三透镜、光焦度为负的第四透镜和光焦度为正的第五透镜构成,所述的后透镜组由光焦度为负的第六透镜构成。4.如权利要求1所述的一种车载mems激光雷达的角度放大光学系统,其特征在于所述的中二透镜组为双凸透镜组。5.如权利要求1所述的一种车载mems激光雷达的角度放大光学系统,其特征在于所述的后透镜组的物侧为凹面,像侧为凸面或平面。
技术总结
本发明公开了一种车载MEMS激光雷达的角度放大光学系统,特点是由从物侧到像侧依次设置的前透镜组、中一透镜组、中二透镜组和后透镜组组成,前透镜组具有正光焦度,中一透镜组具有负光焦度,中二透镜组具有正光焦度,前透镜组、中一透镜组、中二透镜组三者组合成的焦距f’具有正光焦度,且满足:115>∣f’∣>90,后透镜组具有负光焦度,后透镜组的焦距f
技术研发人员:崔志英 张丽芝 段帆琳 李世丹
受保护的技术使用者:宁波永新光学股份有限公司
技术研发日:2021.12.17
技术公布日:2022/4/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1