一种应用于隧道钢筋焊接的视觉定位系统的制作方法
1.本发明属于视觉定位系统技术领域,尤其涉及一种应用于隧道钢筋焊接的视觉定位系统。
背景技术:
2.钢筋为现代钢筋混凝土建筑物中一种重要且主要的建筑材料,钢筋网结构可作为例如楼板或墙面等的支撑结构。钢筋网制作时一般可通过焊接方式将钢筋相互固定于其相交位置。
3.但是现有的隧道钢筋在焊接的过程中大多采用人工示教对其进行焊接,影响隧道钢筋焊接的精度,且使得隧道钢筋焊接工期长。
技术实现要素:
4.本发明的目的在于:为了解决现有的隧道钢筋在焊接的过程中大多采用人工示教对其进行焊接,影响隧道钢筋焊接的精度,且使得隧道钢筋焊接工期长而提出的一种应用于隧道钢筋焊接的视觉定位系统。
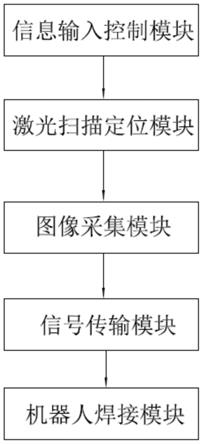
5.为了实现上述目的,本发明采用了如下技术方案:一种应用于隧道钢筋焊接的视觉定位系统,包括信息输入控制模块、激光扫描定位模块、图像采集模块、信号传输模块和机器人焊接模块;所述信息输入控制模块用于编辑扫描轨迹,并且输入钢筋的参数;所述激光扫描定位模块用于执行扫描轨迹,一次性扫描多点或单个交点;所述图像采集模块用于将扫描的多个或单个交点进行采集并生成3d模型,计算交点;所述信号传输模块用于将计算出的交点传输给所述机器人焊接模块,所述机器人焊接模块按照工艺执行焊接。
6.作为上述技术方案的进一步描述:
7.所述信号输入控制模块包括机器人示教器和控制器。
8.作为上述技术方案的进一步描述:
9.所述控制器连接在所述机器人焊接模块上。
10.作为上述技术方案的进一步描述:
11.所述激光扫描定位模块包括激光跟踪传感器。
12.作为上述技术方案的进一步描述:
13.所述机器人焊接模块包括机器人和焊接头,所述激光扫描定位模块连接在所述焊接头上。
14.综上所述,由于采用了上述技术方案,本发明的有益效果是:
15.本发明中,通过设置信息输入控制模块、激光扫描定位模块、图像采集模块、信号传输模块和机器人焊接模块,通过编辑信息输入控制模块上的机器人示教器,来编辑扫描的轨迹,并输入钢筋的参数,使得控制器控制机器人焊接模块,其中机器人焊接模块上的焊接头设置有激光扫描定位模块,可完成一次性扫描多点或单个交点,图像采集模块用于将扫描的多个或单个交点进行采集并生成3d模型,计算交点,并将交点信息用信号传输模块
传输给所述机器人焊接模块,所述机器人焊接模块按照工艺执行焊接,焊接好一个隧道钢筋交点后,到下一个循环扫描焊接,直到焊接完成,此定位系统大大提高了焊接精度,提高了隧道钢筋焊接的效率。
附图说明
16.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
17.图1为一种应用于隧道钢筋焊接的视觉定位系统的工作流程图。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
19.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
20.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.请参阅图1,本发明提供一种技术方案:一种应用于隧道钢筋焊接的视觉定位系统,包括信息输入控制模块、激光扫描定位模块、图像采集模块、信号传输模块和机器人焊接模块;所述信息输入控制模块用于编辑扫描轨迹,并且输入钢筋的参数;所述激光扫描定位模块用于执行扫描轨迹,一次性扫描多点或单个交点;所述图像采集模块用于将扫描的多个或单个交点进行采集并生成3d模型,计算交点;所述信号传输模块用于将计算出的交点传输给所述机器人焊接模块,所述机器人焊接模块按照工艺执行焊接。
22.所述信号输入控制模块包括机器人示教器和控制器。
23.所述控制器连接在所述机器人焊接模块上。控制器控制机器人焊接模块对隧道钢筋交点进行焊接。
24.所述激光扫描定位模块通过激光跟踪传感器对交叉点进行全方位的扫描和数据采集,完成对交叉点的扫描定位。
25.所述机器人焊接模块包括机器人和焊接头,所述激光扫描定位模块连接在所述焊接头上。方便焊接头处的激光扫描定位模块对钢筋交点进行扫描定位。
26.工作原理:通过设置信息输入控制模块、信息输入控制模块、激光扫描定位模块、图像采集模块、信号传输模块和机器人焊接模块,通过编辑信息输入控制模块上的机器人
示教器,来编辑扫描的轨迹,并输入钢筋的参数,使得控制器控制机器人焊接模块,其中机器人焊接模块上的焊接头设置有激光扫描定位模块,来进行扫描,一次性扫描多点或单个交点,图像采集模块用于将扫描的多个或单个交点进行采集并生成3d模型,计算交点,并将交点信息用信号传输模块传输给所述机器人焊接模块,所述机器人焊接模块按照工艺执行焊接,焊接好一个隧道钢筋交点后,到下一个循环扫描焊接,直到焊接完成,此定位系统大大提高了焊接精度,提高了隧道钢筋焊接的效率。
27.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
技术特征:
1.一种应用于隧道钢筋焊接的视觉定位系统,其特征在于,包括信息输入控制模块、激光扫描定位模块、图像采集模块、信号传输模块和机器人焊接模块;所述信息输入控制模块用于编辑扫描轨迹,并且输入钢筋的参数;所述激光扫描定位模块用于执行扫描轨迹,一次性扫描多点或单个交点;所述图像采集模块用于将扫描的多个或单个交点进行采集并生成3d模型,计算交点;所述信号传输模块用于将计算出的交点传输给所述机器人焊接模块,所述机器人焊接模块按照工艺执行焊接。2.根据权利要求1所述的一种应用于隧道钢筋焊接的视觉定位系统,其特征在于,所述信号输入控制模块包括机器人示教器和控制器。3.根据权利要求2所述的一种应用于隧道钢筋焊接的视觉定位系统,其特征在于,所述控制器连接在所述机器人焊接模块上。4.根据权利要求1所述的一种应用于隧道钢筋焊接的视觉定位系统,其特征在于,所述机器人焊接模块包括机器人和焊接头,所述激光扫描定位模块连接在所述焊接头上。
技术总结
本发明公开了一种应用于隧道钢筋焊接的视觉定位系统,属于视觉定位系统技术领域,包括信息输入控制模块、激光扫描定位模块、图像采集模块、信号传输模块和机器人焊接模块;所述信息输入控制模块用于编辑扫描轨迹,并且输入钢筋的参数;所述激光扫描定位模块用于执行扫描轨迹,一次性扫描多点或单个交点;所述图像采集模块用于将扫描的多个或单个交点进行采集并生成3D模型,计算交点;所述信号传输模块用于将计算出的交点传输给所述机器人焊接模块,所述机器人焊接模块按照工艺执行焊接。本发明的视觉定位系统大大提高了焊接精度,提高了隧道钢筋焊接的效率。高了隧道钢筋焊接的效率。高了隧道钢筋焊接的效率。
技术研发人员:周志强 朱海良 李开建 蒋涛 万洋 舒钢强
受保护的技术使用者:上海隧道工程智造海盐有限公司
技术研发日:2022.03.11
技术公布日:2022/5/20
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1