一种机器人焊接系统的制作方法
1.本实用新型涉及管道焊接技术领域,具体涉及一种机器人焊接系统。
背景技术:
2.随着时代的进步和劳动力成本的大幅提高,对管道预制的自动化需求越来越强烈。相贯线的开孔已经实现了自动化,但是相贯线的焊接还是人工来实现的,人工焊接效率慢,不能适应大多数管道预制的相贯线的自动焊接。
技术实现要素:
3.本实用新型设计一种机器人焊接系统,以解决现有背景技术中提到的目前人工焊接,效率慢,不能适应大多数管道预制的相贯线的自动焊接问题。
4.具体技术方案如下:一种机器人焊接系统,包括:焊接机器人,具有焊接功能;第二轨道,所述第二轨道处于所述焊接机器人下方,所述焊接机器人可沿着所述第二轨道上滑动位置;第一轨道,所述第一轨道相对于所述第二轨道平行的设置在所述第二轨道一侧;支撑小车,所述支撑小车可沿着所述第一轨道上滑动位置,所述支撑小车用于支撑安装在变位机上的管道;变位机,所述变位机设于所述第一轨道一端,所述变位机用于驱动安装在变位机卡盘上的管道旋转。
5.进一步的技术方案,所述焊接机器人为五轴焊接机器人。
6.进一步的技术方案,所述焊接机器人上安装有步进电机,所述第二轨道包括一对滑轨以及安装在滑轨一侧的齿条,所述焊接机器人与一对滑轨滑动配合,所述步进电机齿轮与所述齿条咬合,当焊接机器人需要滑动位置时,通过步进电机驱动。
7.进一步的技术方案,所述第一轨道上设有一对轻轨连接板,所述支撑小车底部安装有被动行走轮,所述被动行走轮与所述轻轨连接板滑动配合。
8.进一步的技术方案,至少两个支撑小车与所述第一轨道滑动配合。
9.进一步的技术方案,所述支撑小车还包括有滚轮架以及安装在所述滚轮架上的一对滚轮,一对所述滚轮的间距可调节,以便适应对不同的管道直径支撑。
10.进一步的技术方案,所述滚轮架上等间距的设有滚轮轴槽,调节一对所述滚轮间距时,可将滚轮安装在不同的滚轮槽内。
11.本实用新型的有益效果:
12.应用本实用的技术方案,包括:焊接机器人、第二轨道、第一轨道、支撑小车、变位机,焊接机器人具有焊接功能,第二轨道处于焊接机器人下方,焊接机器人可沿着所述第二轨道上滑动位置,第一轨道相对于第二轨道平行的设置在第二轨道一侧,支撑小车可沿着第一轨道上滑动位置,支撑小车用于支撑安装在变位机上的管道,变位机设于第一轨道一端,变位机用于驱动安装在变位机卡盘上的管道旋转。本方案利用变位机把管道旋转起来,焊接机器人可在第二轨道上主动移动位置,增加了移动范围进而可以对管道不同位置的相管线焊接,利用支撑小车起到支撑作用,与变位机配合实现管道旋转,实现自动焊接,提高
作业效率。
附图说明
13.构成本申请的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
14.在附图中:
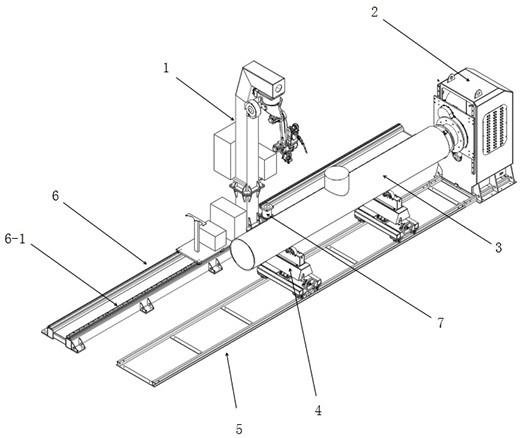
15.图1是本实用新型实施例结构示意图;
16.图2是本实用新型图1的支撑小车放大图。
17.图中:1焊接机器人、2变位机、3管道、4支撑小车、4-1滚轮、4-2滚轮架、4-3被动行走轮、4-4滚轮槽、5第一轨道、5-1轻轨连接板、6第二轨道、6-1齿条、7步进电机。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.参照图1-2,本实用提供一种机器人焊接系统,包括:焊接机器人1、第二轨道6、第一轨道5、支撑小车4、变位机2,焊接机器人1具有焊接功能,所述第二轨道6处于所述焊接机器人1下方,所述焊接机器人1可沿着所述第二轨道6上滑动位置,所述第一轨道5相对于所述第二轨道6平行的设置在所述第二轨道6一侧,所述支撑小车4可沿着所述第一轨道5上滑动位置,所述支撑小车4用于支撑安装在变位机2上的管道3,所述变位机2设于所述第一轨道5一端,所述变位机2用于驱动安装在变位机2卡盘上的管道3旋转。本方案利用变位机2把管道3旋转起来,焊接机器人1可在第二轨道6上主动移动位置,增加了焊接机器人1移动范围进而可以对管道3不同位置的相管线焊接,利用支撑小车4起到支撑作用,与变位机2配合实现管道3旋转,实现自动焊接,提高作业效率。
20.本实用新型中所述的变位机1以及焊接机器人1为标准件,通过市场可获得,其中所述焊接机器人1为五轴焊接机器人,焊接动作灵活姓高。
21.实施例1,基于上述描述,作为本实施例的焊机机器人1可沿着所述第二轨道6上滑动位置的实现方式如下:所述焊接机器人1上安装有步进电机7,所述第二轨道6包括一对滑轨以及安装在滑轨一侧的齿条6-1,所述焊接机器人1与一对滑轨滑动配合,所述步进电机7齿轮与所述齿条6-1咬合,当焊接机器人1需要滑动位置时,通过步进电机7驱动,焊接机器人1的位置移动,利于对管道2不同位置的焊接,增加了焊接范围。
22.基于上述描述,所述支撑小车4可沿着所述第一轨道5上滑动位置,所述支撑小车4用于支撑安装在变位机2上的管道3,实现方式如下,所述第一轨道5上设于一对轻轨连接板5-1,所述支撑小车4底部安装有被动行走轮4-3,所述被动行走轮4-3与所述轻轨连接板5-1滑动配合,当需要对管道3不同位置支撑时,手动推动支撑小车4到指定支撑位置即可,为了更好的支撑管道3,至少两个支撑小,4与所述第一轨道5滑动配合,本实施例中使用两个支撑小车4,作业人员可根据实际管道2长度增加支撑小车4数量。
23.本实施例中,所述支撑小车4还包括有滚轮架4-2以及安装在所述滚轮架4-2上的一对滚轮4-1,一对所述滚轮4-1的间距可调节,以便适应对不同的管道3直径支撑。更进一步的,所述滚轮架4-2上等间距的设有滚轮轴槽4-4,调节一对所述滚轮4-1间距时,可将滚轮4-1安装在不同的滚轮槽4-4内,通过上述方式实现对不同直径的管道3进行支撑。
24.需要指出的是,上述较佳实施例仅为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种机器人焊接系统,其特征在于,包括:焊接机器人,具有焊接功能;第二轨道,所述第二轨道处于所述焊接机器人下方,所述焊接机器人可沿着所述第二轨道上滑动位置;第一轨道,所述第一轨道相对于所述第二轨道平行的设置在所述第二轨道一侧;支撑小车,所述支撑小车可沿着所述第一轨道上滑动位置,所述支撑小车用于支撑安装在变位机上的管道;变位机,所述变位机设于所述第一轨道一端,所述变位机用于驱动安装在变位机卡盘上的管道旋转。2.根据权利要求1所述的一种机器人焊接系统,其特征在于,所述焊接机器人为五轴焊接机器人。3.根据权利要求1所述的一种机器人焊接系统,其特征在于,所述焊接机器人上安装有步进电机,所述第二轨道包括一对滑轨以及安装在滑轨一侧的齿条,所述焊接机器人与一对滑轨滑动配合,所述步进电机齿轮与所述齿条咬合,当焊接机器人需要滑动位置时,通过步进电机驱动。4.根据权利要求1所述的一种机器人焊接系统,其特征在于,所述第一轨道上设有一对轻轨连接板,所述支撑小车底部安装有被动行走轮,所述被动行走轮与所述轻轨连接板滑动配合。5.根据权利要求1所述的一种机器人焊接系统,其特征在于,至少两个支撑小车与所述第一轨道滑动配合。6.根据权利要求4所述的一种机器人焊接系统,其特征在于,所述支撑小车还包括有滚轮架以及安装在所述滚轮架上的一对滚轮,一对所述滚轮的间距可调节,以便适应对不同的管道直径支撑。7.根据权利要求6所述的一种机器人焊接系统,其特征在于,所述滚轮架上等间距的设有滚轮轴槽,调节一对所述滚轮间距时,可将滚轮安装在不同的滚轮槽内。
技术总结
本实用新型公开了一种机器人焊接系统,包括焊接机器人,具有焊接功能;第二轨道,所述第二轨道处于所述焊接机器人下方,所述焊接机器人可沿着所述第二轨道上滑动位置;第一轨道,所述第一轨道相对于所述第二轨道平行的设置在所述第二轨道一侧;支撑小车,所述支撑小车可沿着所述第一轨道上滑动位置,所述支撑小车用于支撑安装在变位机上的管道;变位机,所述变位机设于所述第一轨道一端,所述变位机用于驱动安装在变位机卡盘上的管道旋转。本方案利用变位机将管道旋转,焊接机器人可在第二轨道上主动移动位置,增加了移动范围对管道不同位置的相管线焊接,利用支撑小车起到支撑作用,与变位机配合实现管道旋转,实现自动焊接,提高作业效率。高作业效率。高作业效率。
技术研发人员:戚觊 戚发明 袁越
受保护的技术使用者:江苏前山管道技术有限公司
技术研发日:2022.01.13
技术公布日:2022/8/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1