一种基于大数据分析的人车共享方法与流程
1.本发明属于自动驾驶技术领域,具体涉及一种基于大数据分析的人车共享方法。
背景技术:
2.目前很多车辆都具备了一定的自动驾驶功能,如高速上的车道保持acc,基于一些车厂的号称l3的自动驾驶,实现在高速上的巡航。另外如低速自动驾驶系统,比如自动泊车,可以在司机需要泊车的时候,司机仍在座位上,但是系统可以全程完成泊车动作。
3.但是这些自动驾驶功能在使用过程中都存在的一个普遍的问题就是不考虑驾驶员本身的驾驶习惯,从而导致以下两个问题:
4.降低了系统使用的安全性。如针对自动泊车系统,如何设计泊车的合理车速是一个工程问题。但是过高会让在车上的驾驶员变得很紧张,而且是在靠近障碍物时。即使系统很安全,保证能在障碍物前刹停下来,但是由于司机的紧张感,则会去干预系统,如采用接管或者刹车,从而反倒造成了不安全的后果。另外如高速场景,当有车cut
‑
in到本车道,或者两旁车道驶来大型卡车时,则司机的紧张感同样会导致干预,引起不安全。
5.降低了系统使用的体验。原因同上,即使车辆最终被司机成功的接管,则总体上体验不佳。
6.以上问题本质的原因是这些自动驾驶系统的设计有可能考虑了驾驶员从统计意义上的体验和感受,但未能做到针对个体驾驶员的个性化的定制,从而在个体驾驶员使用这些系统时,这些问题无法有效的得到解决。
技术实现要素:
7.本发明的目的在于提供一种基于大数据分析的人车共享方法,以解决现有的问题。
8.为实现上述目的,本发明提供如下技术方案:一种基于大数据分析的人车共享方法,包括步骤:
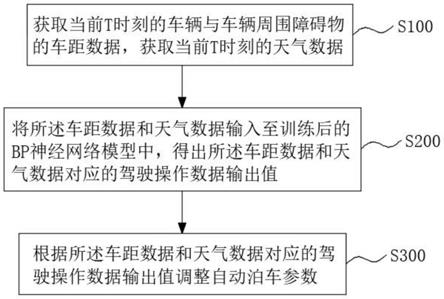
9.s100获取当前t时刻的车辆与车辆周围障碍物的车距数据,获取当前t时刻的天气数据;
10.s200将所述车距数据和天气数据输入至训练后的bp神经网络模型中,得出所述车距数据和天气数据对应的驾驶操作数据输出值;
11.s300根据所述车距数据和天气数据对应的驾驶操作数据输出值调整自动泊车参数。
12.作为本发明一种基于大数据分析的人车共享方法优选地,通过车辆上安装的激光雷达和ccd摄像机采集所述车辆周围环境信息,所述车辆周围障碍物包括道路类型、信号灯、标志牌和旁车;
13.通过汽车can获取驾驶操作数据,所述驾驶操作数据包括驾驶员驾驶车辆行驶过程中的速度、加速度、加速踏板开度信号、方向盘转速、刹车信息、和刹车踏板频率;
14.通过气象系统获取天气数据。
15.作为本发明一种基于大数据分析的人车共享方法优选地,在所述的s100获取当前t时刻的车辆与车辆周围障碍物的车距数据,获取当前t时刻的天气数据之前包括步骤:
16.s10预先建立所述bp神经网络模型。
17.作为本发明一种基于大数据分析的人车共享方法优选地,在所述的s100获取当前t时刻的车辆与车辆周围障碍物的车距数据,获取当前t时刻的天气数据之前还包括步骤:
18.s20采集tn时刻车辆与车辆周围障碍物的车距数据和/或天气数据,获取驾驶员根据所述车距数据和天气数据所作出的驾驶动作;
19.s30根据所述车辆与车辆周围障碍物的车距数据和/或天气数据以及驾驶员作出的驾驶动作分析驾驶习惯,并获取所述驾驶习惯对应的驾驶操作数据;
20.s40建立车距数据和/或天气数据与驾驶操作数据之间的映射关系模型;
21.s50将所述映射关系模型输入至bp神经网络模型,对所述bp神经网络模型进行训练,得到训练后的bp神经网络模型。
22.作为本发明一种基于大数据分析的人车共享方法优选地,在所述的s20采集tn时刻车辆与车辆周围障碍物的车距数据和/或天气数据,获取驾驶员根据所述车距数据和天气数据所作出的驾驶动作之后包括步骤:
23.s21将所述车距数据传输至云端服务器。
24.作为本发明一种基于大数据分析的人车共享方法优选地,在所述的s30根据所述车辆与车辆周围障碍物的车距数据和/或天气数据以及驾驶员作出的驾驶动作分析驾驶习惯,并获取所述驾驶习惯对应的驾驶操作数据之后包括步骤:
25.s31将所述驾驶操作数据传输至云端。
26.作为本发明一种基于大数据分析的人车共享方法优选地,所述的s50将所述映射关系模型输入至bp神经网络模型,对所述bp神经网络模型进行训练,得到训练后的bp神经网络模型具体包括步骤:
27.s51在云端服务器中对所述bp神经网络模型进行训练。
28.作为本发明一种基于大数据分析的人车共享方法优选地,在所述的s300根据所述车距数据和天气数据对应的驾驶操作数据输出值调整自动泊车参数之后包括步骤:
29.s400根据所述自动泊车参数,对车辆进行自动驾驶。
30.作为本发明一种基于大数据分析的人车共享方法优选地,在所述的s100获取当前t时刻的车辆与车辆周围障碍物的车距数据,获取当前t时刻的天气数据之前还包括步骤:
31.s60与气象系统建立连接。
32.作为本发明一种基于大数据分析的人车共享方法优选地,在所述的s100获取当前t时刻的车辆与车辆周围障碍物的车距数据,获取当前t时刻的天气数据之前还包括步骤:
33.s70与云端服务器建立连接。
34.本发明与现有技术相比,具有以下有益效果:自动驾驶系统在未能实现最终的完全自动驾驶时,很长一段时间内都会是人车共驾驶的模式。自动驾驶系统在投入使用后,可以通过用户自行驾驶时的数据,以及自动驾驶启动时用户的接管数据等这些输入,形成对于该特定驾驶员的使用画像,并做针对性的参数调整,从而可以解决人车共驾时由于自动驾驶与人为驾驶习惯差异大,导致人为对自动驾驶进行干预的问题,从而提高了系统使用
的安全性,也提高了系统使用的体验感。
35.综上,本发明缓解或者解决自动驾驶系统在人车共驾模式下司机在各种场景下的紧张感,从而减少人为干预,提高系统的安全性和提升体验。
附图说明
36.图1
‑
7为本发明的流程图。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.请参阅图1和图7所示,本发明提供如下技术方案:一种基于大数据分析的人车共享方法,包括步骤:
39.s100获取当前t时刻的车辆与车辆周围障碍物的车距数据,获取当前t时刻的天气数据;
40.s200将所述车距数据和天气数据输入至训练后的bp神经网络模型中,得出所述车距数据和天气数据对应的驾驶操作数据输出值;
41.s300根据所述车距数据和天气数据对应的驾驶操作数据输出值调整自动泊车参数。
42.具体地,通过车辆上安装的激光雷达和ccd摄像机采集所述车辆周围环境信息,所述车辆周围障碍物包括道路类型、信号灯、标志牌和旁车;
43.通过汽车can获取驾驶操作数据,所述驾驶操作数据包括驾驶员驾驶车辆行驶过程中的速度、加速度、加速踏板开度信号、方向盘转速、刹车信息、和刹车踏板频率;
44.通过气象系统获取天气数据。
45.当车辆与车辆周围障碍物的距离不同时,驾驶员根据驾驶习惯会采取不同的驾驶方式,在不同的天气状况下,驾驶员也会采取不同的驾驶方式,例如,在大雨天气时,驾驶员会会控制车速为30km/h,本实施例中,采取当前时刻下的车辆与车辆周围障碍物的车距数据以及天气数据,并将车距数据和天气数据输入至训练后的bp神经网络模型中,得出对应的驾驶操作数据输出值,再根据驾驶操作数据输出值调整自动泊车参数,该自动泊车参数与驾驶员的驾驶习惯所产生的驾驶数据相近或相同,因此,自动泊车方式与人为驾驶行为相似,能够避免在自动泊车时使驾驶员产生不好的体验从而人为干预自动驾驶,提高了安全性的同时也提高了驾驶员的体验。
46.请参阅图2
‑
4所示,具体地,在所述的s100获取当前t时刻的车辆与车辆周围障碍物的车距数据,获取当前t时刻的天气数据之前包括步骤:
47.s10预先建立所述bp神经网络模型。
48.具体地,在所述的s100获取当前t时刻的车辆与车辆周围障碍物的车距数据,获取当前t时刻的天气数据之前还包括步骤:
49.s20采集tn时刻车辆与车辆周围障碍物的车距数据和/或天气数据,获取驾驶员根
据所述车距数据和天气数据所作出的驾驶动作;
50.s30根据所述车辆与车辆周围障碍物的车距数据和/或天气数据以及驾驶员作出的驾驶动作分析驾驶习惯,并获取所述驾驶习惯对应的驾驶操作数据;
51.s40建立车距数据和/或天气数据与驾驶操作数据之间的映射关系模型;
52.s50将所述映射关系模型输入至bp神经网络模型,对所述bp神经网络模型进行训练,得到训练后的bp神经网络模型;
53.s60与气象系统建立连接。
54.本实施例中,tn为人为驾驶时的随机时刻;当前为人为驾驶时,采集该时刻的车辆与车辆周围障碍物的车距数据、该时刻的天气数据,并获取不同车距、天气下驾驶员采取的驾驶行为,并建立映射关系,来对预先建立的bp神经网络模型进行训练、更新、迭代,使得根据bp神经网络模型产生的数据调整的自动驾驶行为更加贴近驾驶员的驾驶习惯。
55.请参阅图5所示,具体地,在所述的s20采集tn时刻车辆与车辆周围障碍物的车距数据和/或天气数据,获取驾驶员根据所述车距数据和天气数据所作出的驾驶动作之后包括步骤:
56.s21将所述车距数据传输至云端服务器。
57.具体地,在所述的s30根据所述车辆与车辆周围障碍物的车距数据和/或天气数据以及驾驶员作出的驾驶动作分析驾驶习惯,并获取所述驾驶习惯对应的驾驶操作数据之后包括步骤:
58.s31将所述驾驶操作数据传输至云端。
59.具体地,所述的s50将所述映射关系模型输入至bp神经网络模型,对所述bp神经网络模型进行训练,得到训练后的bp神经网络模型具体包括步骤:
60.s51在云端服务器中对所述bp神经网络模型进行训练。
61.具体地,在所述的s100获取当前t时刻的车辆与车辆周围障碍物的车距数据,获取当前t时刻的天气数据之前还包括步骤:
62.s70与云端服务器建立连接。
63.本实施例中,将所获取到的数据传输至云端服务器,并在云端服务器进行模型训练、更新和迭代,一方面能够保存大量数据,一方面能够提高运算效率。
64.请参阅图6所示,具体地,在所述的s300根据所述车距数据和天气数据对应的驾驶操作数据输出值调整自动泊车参数之后包括步骤:
65.s400根据所述自动泊车参数,对车辆进行自动驾驶。
66.本发明采用大数据对于驾驶员的泊车行为进行分析,了解该驾驶员在泊车时的常用车速、刹车时一般离障碍物的距离、常用的泊车路线、泊车过程花费的时间等,从而调整自动泊车系统在刹车距离、与障碍物的安全边界、倒车时的车速等参数,最终给用户提供一个即能解决用户泊车,同时在泊车过程中让用户不紧张,符合预期行为的系统。
67.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1