一种新型快速反应车辆
1.本实用新型涉及一种新型快速反应车辆。
背景技术:
2.随着城市面积的扩大及新能源汽车与汽车智能化的发展,小型快速反应车辆也相应得到发展。一般来说快速反应车辆需要由城市及附近的相关单位出发,通过良好的铺装路面,然后进入复杂地形的越野路段进行相关工作。一般用于侦察或救援,需要在短时间内到达预定地点,对其速度和地形通过性的要求较高。
3.现有车型对于其地形的适应性比较局限,一般为suv或全地形越野车,无法同时兼顾良好铺装路面的高速行驶及越野和复杂地形的通过性,这大大制约了车辆到达事件发生地的速度(侦察,救援或急救车辆等),可能会由于时间的延长而错过最佳的时机。故由此需求出发,针对高速行驶与复杂地形的通过性,基于汽车电子控制系统与新能源汽车技术,设计一种兼顾良好铺装路面的低阻力与各种复杂地形的越野性能的小型车辆结构具有一定的实际意义。
技术实现要素:
4.鉴于现有技术的不足,本实用新型所要解决的技术问题是提供一种新型快速反应车辆。
5.为了解决上述技术问题,本实用新型的技术方案是:一种新型快速反应车辆,包括座舱,座舱两侧分别通过两轮式机械腿支撑,所述轮式机械腿均包括六个控制臂,相邻控制臂间均相互铰接,其中最内端的第一控制臂内端与座舱铰接,最外端的第六控制臂转动连接车轮,每个控制臂均通过不同的驱动装置驱动。
6.进一步的,所述座舱两侧分别凸出有四个固定座,位于轮式机械腿最内端的第一控制臂均通过竖向设置的第一铰接杆与固定座铰接,第一控制臂外经横向穿过的第二铰接杆铰接有第二控制臂,第二控制臂外端经横向穿过的第三铰接杆铰接第三控制臂,第三控制臂外端经横向穿过的第四铰接杆铰接有第四控制臂,第四控制臂外经竖向穿过的第五铰接杆铰接有第五控制臂,第五控制臂外经纵向穿过的第六铰接杆铰接有第六控制臂。
7.进一步的,轮式机械腿共设有四个,中心对称设置在座舱周侧,所述车轮均经轮毂电机驱动。
8.与现有技术相比,本实用新型具有以下有益效果:1.该车辆结构使用电机控制的轮腿式完全独立悬架,座舱部分可根据车辆具体的实际应用场景进行调整改装(例如改装座舱变为无人车或其他运载支架等);2.采用分布式轮毂电机驱动,噪声小,方便判断周围环境情况;3.由于使用轮腿式完全独立悬架,其车轮具有多自由度调节的功能,可根据情况调整各种悬架参数或使车轮倾斜辅助转向。4.可将车轮锁死变为机械腿模型增强地形通过性,相对于普通车辆将能发挥更多基于机械腿的功能;5.通过合适的控制策略保证座舱的舒适性(救援时搭载伤员时对车辆的舒适度要求);6.轮胎分别位于车辆最前端和最末端,
故车辆的接近角离去角均大于90
°
,紧急情况能将轮胎作为缓冲块,并使用轮式机械腿来主动控制受到冲击时的泄力方向,从而提高车辆的安全性。
9.下面结合附图和具体实施方式对本实用新型做进一步详细的说明。
附图说明
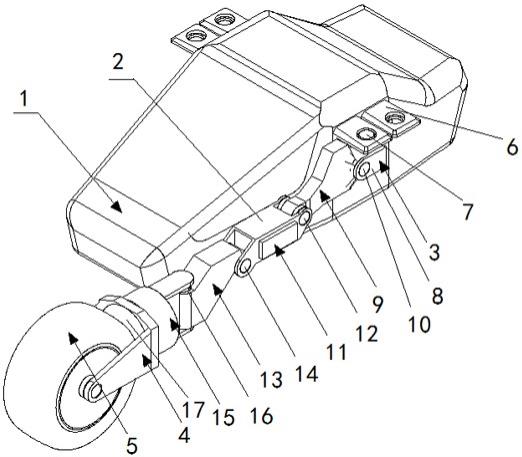
10.图1为本实用新型实施例中座舱与轮式机械腿的连接构造示意图;
11.图2为本实用新型实施例中车辆处于高速低阻状态示意图;
12.图3为本实用新型实施例中车辆处于车轮倾斜辅佐转弯状态示意图;
13.图4为本实用新型实施例中车辆处于普通越野状态示意图;
14.图5为本实用新型实施例中车辆处于机械腿攀爬状态示意图;
15.图6本实用新型实施例的立体图。
16.图中:1
‑
座舱,2
‑
轮式机械腿,3
‑
第一控制臂,4
‑
第六控制臂,5
‑
车轮,6
‑
固定座,7
‑
第一铰接杆,8
‑
铰接端头,9
‑
第二控制臂,10
‑
第二铰接杆,11
‑
第三控制臂,12
‑
第三铰接杆,13
‑
第四控制臂,14
‑
第四铰接杆,15
‑
第五控制臂,16
‑
第五铰接杆,17
‑
第六铰接杆。
具体实施方式
17.为让本实用新型的上述特征和优点能更明显易懂,下文特举实施例,并配合附图,作详细说明如下。
18.如图1~6所示,一种新型快速反应车辆,包括座舱1,座舱两侧分别通过两轮式机械腿2支撑,所述轮式机械腿均包括六个控制臂,相邻控制臂间均相互铰接,其中最内端的第一控制臂3内端与座舱铰接,最外端的第六控制臂4转动连接车轮5,每个控制臂均通过不同的驱动装置驱动,实现多自由度旋转。
19.在本实用新型实施例中,所述座舱两侧分别凸出有四个固定座6,分别连接四个轮式机械腿,位于轮式机械腿最内端的第一控制臂均通过竖向设置的第一铰接杆7与固定座铰接,所述固定座上设有驱动及限制第一铰接杆转动的驱动电机,第一控制臂外端朝外延伸出铰接端头8,通过该铰接端头将第二控制臂9内端夹设在内并经横向穿过的第二铰接杆10铰接;所述第三控制臂11内外端均延伸出铰接端头,第二控制臂外端插入第三控制臂内端的铰接端头并经横向穿过的第三铰接杆12铰接,第三控制臂外端铰接端头将第四控制臂13内端夹设在内并经横向穿过的第四铰接杆14铰接,所述第五控制臂15内外端均延伸出铰接端头,第四控制臂外端插入第五控制臂内端的铰接端头并经竖向穿过的第五铰接杆16铰接,第五控制臂外端铰接端头将第六控制臂内端夹设在内并经纵向穿过的第六铰接杆17铰接,上述每个铰接端头上均固设有与各控制臂一一对应的小型驱动电机。
20.在本实用新型实施例中,轮式机械腿共设有四个,中心对称设置在座舱周侧,所述车轮均经轮毂电机驱动。
21.在良好的铺装路面,如图2所示,轮腿式悬架将缩小车辆的离地间隙,通过第一控制臂适当减小轮距,增加轴距,并通过第六控制臂调整车轮角度参数以适应高速低阻行驶状态。在此情况下,车辆拥有最小迎风面积,在保持稳定性的同时尽量减小空气阻力,必要时可调整轮胎角度,适当减小轮胎与路面的接触面积,减小滚动阻力。此外,在高速转弯时可通过悬架及轮胎的侧倾来辅助过弯,减少座舱的侧倾,如图3所示。
22.在普通越野路面,如图4所示,轮腿式悬架将车辆的离地间隙提高,增大轮距来改善车辆的稳定性。同时使用对应的控制策略提升越野时座舱的舒适性。在地形有所变化时还可根据路面情况(涉水,侧倾坡面,小坑洞等)调整悬架的具体设置。
23.在复杂困难路面情况,如图5所示,车辆通过驱动电机将车轮锁死,使悬架处于机械腿模式,通过第一控制臂水平转动该悬架,使用攀爬姿态来克服复杂地形,极大地提高车辆的通过性。同时,狭小的空间内,可将机械腿尽量收缩减小车辆体积,使用机械腿模式或竖向旋转车轮方向,可在狭小空间内完成的转向与全方位移动。
24.本实用新型不局限于上述最佳实施方式,任何人在本实用新型的启示下都可以得出其他各种形式的新型快速反应车辆。凡依本实用新型申请专利范围所做的均等变化与修饰,皆应属本实用新型的涵盖范围。
技术特征:
1.一种新型快速反应车辆,其特征在于:包括座舱,座舱两侧分别通过两轮式机械腿支撑,所述轮式机械腿均包括六个控制臂,相邻控制臂间均相互铰接,其中最内端的第一控制臂内端与座舱铰接,最外端的第六控制臂转动连接车轮,每个控制臂均通过不同的驱动装置驱动。2.根据权利要求1所述的一种新型快速反应车辆,其特征在于:所述座舱两侧分别凸出有四个固定座,位于轮式机械腿最内端的第一控制臂均通过竖向设置的第一铰接杆与固定座铰接,第一控制臂外经横向穿过的第二铰接杆铰接有第二控制臂,第二控制臂外端经横向穿过的第三铰接杆铰接第三控制臂,第三控制臂外端经横向穿过的第四铰接杆铰接有第四控制臂,第四控制臂外经竖向穿过的第五铰接杆铰接有第五控制臂,第五控制臂外经纵向穿过的第六铰接杆铰接有第六控制臂。3.根据权利要求2所述的一种新型快速反应车辆,其特征在于:轮式机械腿共设有四个,中心对称设置在座舱周侧,所述车轮均经轮毂电机驱动。
技术总结
本实用新型涉及一种新型快速反应车辆,包括座舱,座舱两侧分别通过两轮式机械腿支撑,所述轮式机械腿均包括六个控制臂,相邻控制臂间均相互铰接,其中最内端的第一控制臂内端与座舱铰接,最外端的第六控制臂转动连接车轮,每个控制臂均通过不同的驱动装置驱动,该快速反应车辆通过其四个轮式机械腿作为完全独立的悬架,并通过控制臂调节悬架参数以多自由度调节车轮,适用性强。适用性强。适用性强。
技术研发人员:查云飞 吴昊 马芳武 侯乃仁 权晓玉 刘鑫烨
受保护的技术使用者:福建工程学院
技术研发日:2021.01.30
技术公布日:2021/10/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1