无人叉车线控助力装置的制作方法
1.本实用新型属于无人叉车技术领域,更具体的说涉及一种无人叉车线控助理装置。
背景技术:
2.电动助力转向系统(eps)是一种直接依靠电机提供辅助扭矩的动力转向系统,与传统的液压助力转向系统相比,eps系统具有很多优点。
3.随着自动化生产的推进,目前越来越多的厂家采用无人叉车来进行搬运转移货物,目前的无人叉车均采用电源作为动力能源,而无人叉车的转向系统,通常也采用电动控制,其基本包括转向拉杆和助力装置,而其中助力装置通常采用电机作为动力,以驱动转向拉杆的移动。
4.目前的无人叉车上助力装置的电机为单电机,但无人叉车在无负载时,其重量很轻,易于转动车轮,助力装置的电机通常动力过剩,而在负载时,又非常重,车轮转动阻力大,此时助力装置的电机易造成动力不足,无法有效进行调节。
技术实现要素:
5.针对现有技术的不足,本实用新型提供了一种可以根据无人叉车的负载选择是否启用辅助驱动电机,在负载较轻时,仅利用主驱动电机即可轻松驱动车轮转动,而在负载较重时,可以使离合器结合,启动辅助驱动电机与主驱动电机共同来驱动车轮转动,提高扭矩,即根据实际情况进行选择,避免造成动力浪费或动力不足。
6.为实现上述目的,本实用新型提供了如下技术方案:一种无人叉车线控助力装置,包括主驱动电机和传动组件,还包括辅助驱动电机,所述辅助驱动电机与传动组件之间设置有离合器。
7.进一步的所述传动组件设置有两组,其中一组传动组件为主传动组件,其与主驱动电机连接,另一组传动组件为辅助传动组件,其与离合器连接,两组传动组件结构相同且相互连接。
8.进一步的所述传动组件包括轴承、旋转螺纹筒和驱动轮,轴承套在旋转螺纹筒上,旋转螺纹筒与转向拉杆螺纹连接,所述驱动轮与旋转螺纹筒的外侧连接。
9.进一步的所述驱动轮与旋转螺纹筒之间通过皮带连接。
10.进一步的所述离合器为电磁离合器。
11.与现有技术相比,本实用新型的有益效果是:通过设置辅助驱动电机和离合器,在负载较轻时,选择利用离合器将辅助驱动电机和传动组件断开,仅利用主驱动电机驱动传动组件使转向拉杆移动达到转向的目的,而在负载较重时,仅依靠主驱动电机其动力不足,通过离合器将辅助驱动电机与传动组件结合,此时利用主驱动电机和辅助驱动电机同驱动传动组件使转向拉杆移动达到转向的目的,提供较大的力矩,保证转向动力充足。
附图说明
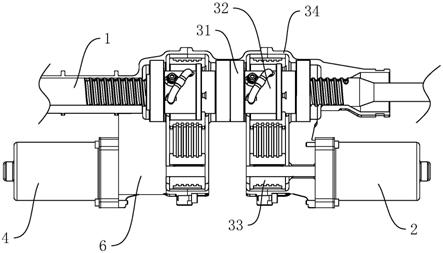
12.图1为本实用新型的结构示意图;
13.图2为助力装置的结构示意图;
14.图3为本实用新型的控制示意图。
15.附图标记:1、转向拉杆;2、主驱动电机;3、主传动组件;31、轴承;32、旋转螺纹筒;33、驱动轮;34、壳体;4、辅助驱动电机;5、辅助传动组件;6、离合器;7、重力传感器;8、控制器。
具体实施方式
16.参照图1至图3对本实用新型远程操控式agv叉车线控转向装置的实施例做进一步说明。
17.在本实用新型的描述中,需要说明的是,对于方位词,如有术语“中心”,“横向(x)”、“纵向(y)”、“竖向(z)”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示方位和位置关系为基于附图所示的方位或位置关系,仅是为了便于叙述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定方位构造和操作,不能理解为限制本实用新型的具体保护范围。
18.此外,如有术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明技术特征的数量。由此,限定有“第一”、“第二”特征可以明示或者隐含包括一个或者多个该特征,在本实用新型描述中,“数个”、“若干”的含义是两个或两个以上,除非另有明确具体的限定。
19.一种远程操控式agv叉车线控转向装置,包括转向拉杆1和助力装置,所述助力装置包括主驱动电机2和传动组件,传动组件连接转向拉杆1,助力装置还包括辅助驱动电机4,所述辅助驱动电机4与传动组件之间设置有离合器6,还包括控制器8和重力传感器7,所述控制器8电连接重力传感器7和离合器6。
20.本实用新型中重力传感器7可以置于货叉处,用于获得货物的重量,并将数据传输至控制器8,通过控制器8控制离合器6的结合与分离,本实用新型中控制器8还电连接主驱动电机2和辅助驱动电机4。
21.工作时,可以在控制器8内设置重力的阈值,当重力传感器7获得的负载未达到阈值时,离合器6处于分离断开状态,同时辅助驱动电机4不启动,当负载达到或高于阈值时,离合器6处于结合状态,并辅助驱动电机4与主驱动电机2同时启动,保持同步。
22.也可以没有重力传感器7,工作人员远程根据叉车是否装载货物来选择是否启用离合器6和辅助驱动电机4也可以。
23.本实用新型中所述传动组件设置有两组,其中一组传动组件为主传动组件3,其与主驱动电机2连接,另一组传动组件为辅助传动组件5,其与离合器6连接,两组传动组件结构相同且相互连接。
24.如图2所示,主传动组件3和辅助传动组件5相互固定连接,二者始终保持同步运动。
25.本实施例优选的所述传动组件包括轴承31、旋转螺纹筒32和驱动轮33,轴承31套
在旋转螺纹筒32上,旋转螺纹筒32与转向拉杆1螺纹连接,所述驱动轮33与旋转螺纹筒32的外侧连接。
26.具体的传动组件还包括壳体34,轴承31的外侧固定在壳体34上,旋转螺纹筒32通过轴承31可以在壳体34内进行转动,驱动轮33位于壳体34内,主传动组件3的旋转螺纹筒32与辅助传动组件5的旋转螺纹筒32固定连接,其中主传动组件3的驱动轮33直接与主驱动电机2连接,在主驱动电机2运行时,两个旋转螺纹筒32始终保持同步转动,而辅助传动组件5的驱动轮33通过离合器6间接连接辅助驱动电机4,在离合器6断开时,两组传动组件跟随主驱动电机2动作,在离合器6结合时,主驱动电机2和辅助驱动电机4同步,同时驱动两组传动组件。
27.在本实用新型中实际还可以将离合器6置于两旋转螺纹筒32之间。
28.本实施例优选的在主驱动电机2与主传动组件3之间也设置有离合器6,此时可以根据需要选择采用其中任意一个或两个作为转向的动力源。
29.本实施例优选的所述驱动轮33与旋转螺纹筒32之间通过皮带连接。
30.本实施例优选的所述离合器6为电磁离合器。
31.以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种无人叉车线控助力装置,包括主驱动电机和传动组件,其特征在于:还包括辅助驱动电机,所述辅助驱动电机与传动组件之间设置有离合器。2.根据权利要求1所述的无人叉车线控助力装置,其特征在于:所述传动组件设置有两组,其中一组传动组件为主传动组件,其与主驱动电机连接,另一组传动组件为辅助传动组件,其与离合器连接,两组传动组件结构相同且相互连接。3.根据权利要求2所述的无人叉车线控助力装置,其特征在于:所述传动组件包括轴承、旋转螺纹筒和驱动轮,轴承套在旋转螺纹筒上,旋转螺纹筒与转向拉杆螺纹连接,所述驱动轮与旋转螺纹筒的外侧连接。4.根据权利要求3所述的无人叉车线控助力装置,其特征在于:所述驱动轮与旋转螺纹筒之间通过皮带连接。5.根据权利要求4所述的无人叉车线控助力装置,其特征在于:所述离合器为电磁离合器。
技术总结
本实用新型公开了一种无人叉车线控助力装置,包括主驱动电机和传动组件,还包括辅助驱动电机,所述辅助驱动电机与传动组件之间设置有离合器,本实用新型可以根据无人叉车的负载选择是否启用辅助驱动电机,在负载较轻时,仅利用主驱动电机即可轻松驱动车轮转动,而在负载较重时,可以使离合器结合,启动辅助驱动电机与主驱动电机共同来驱动车轮转动,提高扭矩,即根据实际情况进行选择,避免造成动力浪费或动力不足。费或动力不足。费或动力不足。
技术研发人员:高志良 黄蓉 周连军 孔庆团 陈波 吴云峰
受保护的技术使用者:浙江国芯科技有限公司
技术研发日:2021.06.11
技术公布日:2022/1/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1