一种深海全向机器人
1.本实用新型涉及一种水下机器人,尤其涉及一种深海全向机器人。
背景技术:
2.在对海洋资源的研究和对海底的勘测的过程当中,鉴于海底环境的水压力和能见度、危险程度等诸多方面的问题,给人类对海底进行研究造成了很大的局限性。因此我们需要依靠各种的现代化设备和机器来完成海底作业。而在这其中,“深海机器人”就是一种恰合度相当高的设备,深海机器人不但能够在海中利用推进器进行移动,而且还能在海底利用履带机构进行移动。由于深海机器人具有很强的机动性和灵活性,深海机器人正在作为人类对海洋研究最适合的设备工具。
技术实现要素:
3.本实用新型的目的在于克服上述现有技术的不足,提供了一种深海全向机器人。
4.为了实现上述目的,本实用新型采用的技术方案是:
5.一种深海全向机器人,所述机器人为有线遥控形式,所述深海全向机器人包括镂空的组装式框架结构,所述框架结构包括两个侧板,连接两个侧板的位于底部的底板,连接于两个侧板中上部位置的平行于所述底板的两个边板;所述两个边板中部各设有一个电机、叶片形式的垂直推进器,所述两个边板底面后部各设有一个电机、叶片形式的水平推进器;所述两个垂直推进器和两个水平推进器均对称布置;所述两个边板之间固设有密封舱;所述底板上表面设有与所述密封舱线连的电源仓;所述两个边板上表面设有浮力块;所述密封舱设有控制器和传感器,所述遥控控制线通过密封舱的防水接头连接密封舱内的控制器;所述垂直推进器和水平推进器由所述控制器线控;所述两个侧板的内侧面前部分别设有与所述控制器线连的照明灯。通过控制电机的转向和转速,水平推进器可以实现深海机器人的前进、后退和水中转向等功能;同理,两个垂直推进器可以实现机器人的上升、下降以及悬停等功能。
6.进一步地,所述底板下固设有履带行走机构,所述履带行走机构由所述控制器线控。可以在海底行走,且适应各种地形。
7.进一步地,所述密封舱前部为圆滑的流线型,密封舱的尾部设有防水接头。机器人多数情况是前行,此结构可减小前行阻力,保护线束和接头。
8.本实用新型的有益效果是:与现有技术相比,本实用新型没有很复杂的机械机构,生产成本低,而且动力系统采用的是两个水平推进器和两个垂直推进器组合而成的rov水中动力系统。水平推进器可以实现前进、后退、转向等功能。两个垂直推进器可以实现rov的上升、下潜、和悬停等运动,具有强机动性和高灵活度。该布置形式产生的推进力较为平稳且推进的效率相对较高,能够提升深海机器人的操作性和稳定性,给控制系统提供了很好的基础。采用这样布置推进器的好处是可以实现以最少的推进器数量实现深海的全向运动,实现了多自由度的要求节约了成本。本产品属于中端和民用深海机器人,适用于水下勘
探和水下信息采集。
附图说明
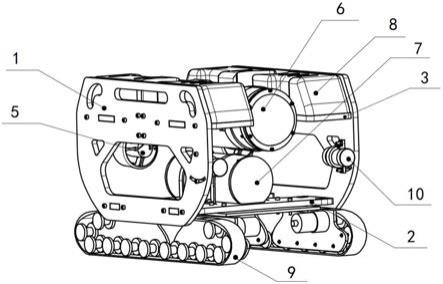
9.图1是本实用新型实施例侧视图;
10.图2是本实用新型实施例侧仰视图;
11.图中标号名称:1-侧板,2-底板,3-边板,4-垂直推进器,5-水平推进器,6-密封舱,7-电源仓,8-浮力块,9-履带行走机构,10-照明灯,11-防水接头。
具体实施方式
12.下面结合实施例对本实用新型作进一步的详细说明,一种深海全向机器人,所述机器人为有线遥控形式,如图1和2所示,所述深海全向机器人包括镂空的组装式框架结构,所述框架结构包括两个侧板1,连接两个侧板1的位于底部的底板2,连接于两个侧板1中上部位置的平行于底板2的两个边板3,所述两个边板3中部分别设有一个电机、叶片形式的垂直推进器4,所述两个边板3底面后部分别设有一个电机、叶片形式的水平推进器5,所述两个垂直推进器4和两个水平推进器5均对称布置;所述两个边板3之间设有密封舱6;所述底板2上表面设有与所述密封舱6线连的电源仓7;所述两个边板3上表面设有浮力块8;所述密封舱6设有控制器和传感器,所述遥控控制线通过密封舱6的防水接头11连接密封舱6内的控制器,所述垂直推进器4和水平推进器5由控制器线控;所述两个侧板1的内侧面前部分别设有与控制器线连的照明灯10;所述底板2下设有履带行走机构9,所述密封舱6前部为圆滑的流线型,密封舱6的尾部设有线束防水接头11。
13.推进器防水电机:电机采用精密的防水设计,采用4级12槽高扭矩马达设计。数控机床加工钢胚,6061-t6铝散热片,二次氧化处理,外观高端精细,高纯铜线圈,能耐高温180 至200度。采用高平衡防爆转子,具有高平滑度,高准确性及高转速性能,动平衡控制在10mg以内,且后期可拆卸,替换。由超薄硅钢片制成,因而电机转子具有高平滑度,高准确性及高转速性能。防水电机是通过现有配置的方式来进行安装在产品上。
14.密封舱6设计:深海机器人密封舱6是其最主要的结构之一,其作用在于把各类的电器元件密封起来,同时还起到抗压并保护深海机器人所配备的电器元件的作用。深海机器人想要完成水下作业,防水是极其重要的一环,密封舱6解决了水下防水的难题。密封舱6主要的材料使用的是耐压玻璃微珠复合材料,耐腐蚀强,海水淡水中均可使用。
15.履带行走机构9:采用hello maker的t800四驱金属坦克底盘机构。优点在于可以越野减震,可以用于多种复杂地形。diy搭配安装,预留多种安装接口,以此来满足安装控制单元的需求,并利用底盘进行改装或者安装其他机构,本设计中t800智能坦克底盘配备防水电机sp-036600-05。
16.控制系统:该深海全向机器人控制系统是由控制器和传感器以及数据传输系统组成。其中控制器的核心是pixhawk飞控处理器,该处理器系统有两个,分别是stm32f427主处理器系统与副处理器系统stm32f100。获取传感器信息与实现与其他计算机的通信主要是由主处理器来完成的,而控制pwm信号的输出则是由副处理器来实现。控制系统需要实现接受和处理各类传感器的数据,由此来实现水下信息获取,图像的采集以及正常作业。最后所设计的控制系统还需要实现获取岸上操作员的操作指令,并将其收集到的各类数据资料发
回到岸上。本专利控制器的基本原理:以树莓派3b作为信息传递的中转站,其可以获得来自地面的指令且传送给主处理系统飞控平台。主处理系统经过一定的控制计算后将信号传递到执行系统,进而控制深海机器人的运动。主处理系统会将获得的传感器数据收集且传送到树莓派3b,再通过数据传递系统以高速以太网的手段传送回岸上操纵系统。
17.传感器系统设计:各类传感器与主处理器stm32f427相连接,pixhawk飞控内部集成有各类传感器,分别有以下几类:l3gd20陀螺仪、lsm303d磁力计/加速度计、mpu6000加速度计以及ms5611气压高度计。其中开源pixhawk飞控应用在深海机器人控制的时候,陀螺仪、加速度计和磁力计三者共同构成了深海机器人的航姿参考系统。由于气压高度计在水下无法正常使用,因此需要在飞控的i2c接口上外接ms5837深度传感器用于测量深海机器人所在的深度。
18.数据传递系统的设计:数据传递系统的功能在于其能够把深海机器人所拍摄的视频传递到岸上操作站以及实现岸上操作站和pixhawk飞控主控制系统之间的中继通信。本深海全向 小型海机器人采用树莓派3b微型计算机配合fathomx以太网通信板来构成深海全向小型机器人的数据传递系统。实现视频数据的收集处理和岸上操作站与pixhawk飞控的中继通信是利用树莓派3b微型计算机来实现,而实现高速稳定的远距离以太网通信则是通过fathomx来实现。
19.以上内容仅用以说明本实用新型的技术方案,本领域的普通技术人员对本实用新型的技术方案进行的简单修改或者等同替换,均不脱离本实用新型技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1