一种无人机定位装置的制作方法
1.本实用新型涉及无人机定位技术领域,具体为一种无人机定位装置。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机这几大类。与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。由于无人驾驶飞机对未来空战有着重要的意义,世界各主要军事国家都在加紧进行无人驾驶飞机的研制工作。
3.无人机在返航时需要使用定位装置进行准确降落,但现有的定位装置只能够起到支撑作用,并不能对降落后的无人机起到固定作用,从而使得无人机在移动时发生偏移或掉落,从而使得无人机损坏,导致财务损失。
技术实现要素:
4.本实用新型的目的在于提供一种无人机定位装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种无人机定位装置,包括底座,所述底座上设置有固定机构,所述固定机构包括支撑块、第一电机、柔性固定带、齿轮和皮带,所述底座上固定安装有对称的两个支撑块,左侧的所述支撑块上固定安装有柔性固定带,两所述支撑块之间固定安装有弧形支撑板,右侧的所述支撑块内开设有空腔,所述空腔转动连接有第一转动轴,所述第一转动轴上固定安装有齿轮,所述柔性固定带上均匀的设置有多个卡槽,所述齿轮与卡槽啮合连接,所述第一转动轴上固定安装有第一传动轮,所述底座上固定安装有第一电机,所述第一电机的输出端固定连接有第二转动轴,所述第二转动轴上固定安装有第二传动轮,所述第一转动轴和第二传动轮上套装有皮带。
7.本实用新型进一步的方案:所述底座上固定安装有底座,所述底座上固定安装有支撑柱,所述支撑柱的上端固定安装有第一支撑框,所述第一支撑框的上端固定安装有第二支撑框,所述第二支撑框上固定安装有第二电机,所述第二电机的输出端固定安装有第三转动轴,所述第三转动轴上固定安装有识别雷达,所述第三转动轴与第一支撑框转动连接。
8.本实用新型进一步的方案:所述第一支撑框上固定安装有处理器,所述处理器与识别雷达之间电性连接。
9.本实用新型进一步的方案:所述第一支撑框上固定安装有显示屏,所述底座上设置有摄像头,所述摄像头与显示屏通过导线相连。
10.本实用新型进一步的方案:所述底座上固定安装有gps定位器,所述gps定位器与
213、第一传动轮209和皮带210,从而带动第一转动轴207转动,从而带动固定安装在第一转动轴207上的齿轮208转动,通过与齿轮208啮合的卡槽203,从而带动柔性固定带 202在通孔205内移动,从而实现对无人机支撑腿的固定,从而避免无人机在移动时发生偏移或掉落,避免无人机损坏,导致财务损失。
23.实施例2
24.无人机在在返航时需要准确的进行指引与定位,但现有的定位装置定位并不准确,故本实施例通过设置定位雷达、处理器和gps定位器,从而实现对无人机的准确定位。
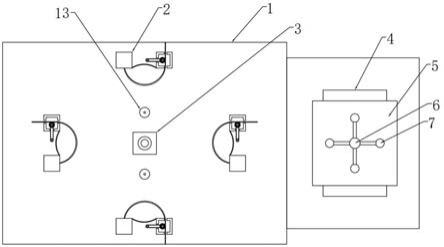
25.请参阅图1和3,所述底座1上固定安装有支撑座4,所述支撑座4上固定安装有支撑柱8,所述支撑柱8的上端固定安装有第一支撑框5,所述第一支撑框5的上端固定安装有第二支撑框10,所述第二支撑框10上固定安装有第二电机9,所述第二电机9的输出端固定安装有第三转动轴6,所述第三转动轴6上固定安装有识别雷达7,所述第三转动轴6与第一支撑框5转动连接。所述第一支撑框5上固定安装有处理器11,所述处理器 11与识别雷达7之间电性连接。所述第一支撑框5上固定安装有显示屏12,所述底座1 上设置有摄像头13,所述摄像头13与显示屏12通过导线相连,所述底座1上固定安装有 gps定位器3,所述gps定位器3与处理器11电性连接。
26.实施例原理:无人机在进行返航时,会通过信号发射器向地面发射信号,启动识别雷达7,通过第二电机9带动识别雷达7转动,从而能够更好的使得识别雷达7进行识别,识别雷达7接收到信号后,将信号传输给处理器11,通过处理器11的处理,将信号传输给gps定位器,从而对无人机进行准确的引导,通过设置在底座1上的摄像头13将降落时的实时画面传输到显示屏12上,从而能够实时看到降落的画面。
27.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
28.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
技术特征:
1.一种无人机定位装置,包括底座(1),其特征在于:所述底座(1)上设置有固定机构(2),所述固定机构包括支撑块(201)、第一电机(212)、柔性固定带(202)、齿轮(208)和皮带(210),所述底座(1)上固定安装有对称的两个支撑块(201),左侧的所述支撑块(201)上固定安装有柔性固定带(202),两所述支撑块(201)之间固定安装有弧形支撑板(204),右侧的所述支撑块(201)内开设有空腔(206),所述空腔(206)转动连接有第一转动轴(207),所述第一转动轴(207)上固定安装有齿轮(208),所述柔性固定带(202)上均匀的设置有多个卡槽(203),所述齿轮(208)与卡槽(203)啮合连接,所述第一转动轴(207)上固定安装有第一传动轮(209),所述底座(1)上固定安装有第一电机(212),所述第一电机(212)的输出端固定连接有第二转动轴(211),所述第二转动轴(211)上固定安装有第二传动轮(213),所述第一传动轮(209)和第二传动轮(213)上套装有皮带(210)。2.根据权利要求1所述的一种无人机定位装置,其特征在于:所述底座(1)上固定安装有支撑座(4),所述支撑座(4)上固定安装有支撑柱(8),所述支撑柱(8)的上端固定安装有第一支撑框(5),所述第一支撑框(5)的上端固定安装有第二支撑框(10),所述第二支撑框(10)上固定安装有第二电机(9),所述第二电机(9)的输出端固定安装有第三转动轴(6),所述第三转动轴(6)上固定安装有识别雷达(7),所述第三转动轴(6)与第一支撑框(5)转动连接。3.根据权利要求2所述的一种无人机定位装置,其特征在于:所述第一支撑框(5)上固定安装有处理器(11),所述处理器(11)与识别雷达(7)之间电性连接。4.根据权利要求2所述的一种无人机定位装置,其特征在于:所述第一支撑框(5)上固定安装有显示屏(12),所述底座(1)上设置有摄像头(13),所述摄像头(13)与显示屏(12)通过导线相连。5.根据权利要求1所述的一种无人机定位装置,其特征在于:所述底座(1)上固定安装有gps定位器(3),所述gps定位器(3)与处理器(11)电性连接。
技术总结
本实用新型公开一种无人机定位装置,包括底座,所述底座上设置有固定机构,所述底座上固定安装有对称的两个支撑块,左侧的所述支撑块上固定安装有柔性固定带,两所述支撑块之间固定安装有弧形支撑板,右侧的所述支撑块内开设有空腔,所述空腔转动连接有第一转动轴,所述第一转动轴上固定安装有齿轮,所述柔性固定带上均匀的设置有多个卡槽,所述齿轮与卡槽啮合连接,所述第一转动轴上固定安装有第一传动轮,所述底座上固定安装有第一电机,所述第一电机的输出端固定连接有第二转动轴,所述第二转动轴上固定安装有第二传动轮,所述第一传动轴和第二传动轴上套装有皮带。通过设置固定机构,从而避免无人机在移动时发生偏移或掉落。从而避免无人机在移动时发生偏移或掉落。从而避免无人机在移动时发生偏移或掉落。
技术研发人员:游加明
受保护的技术使用者:上海基格伽北科技有限公司
技术研发日:2020.08.20
技术公布日:2021/11/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1