回转式传送装置以及组装设备的制作方法
[0001]
本发明涉及组装设备的技术领域,尤其涉及一种回转式传送装置以及组装设备。
背景技术:
[0002]
随着工业规模的提升,自动化生产已经成为重要的发展趋势。相较于人力生产,自动化生产具有高效率、品质稳定以及低人力成本的优点。在现有的自动化组装设备中,一般采用两条传输线。其中,一条传输线用于产品组装作业,另一条传输线用于将载具回流。如此一来,便能够实现连续的自动化生产,减少人力的参与。然而,两条传输线所占据的面积较大,造成空间利用率不高。另一方面,位于传输线上的载具若没有精确定位,也会导致产品组装的精度不佳,使产品质量降低。
技术实现要素:
[0003]
本发明提供一种回转式传送装置,解决目前的自动化设备使用两条传输线导致空间利用率低下的问题。
[0004]
为了解决上述技术问题,本发明是这样实现的:
[0005]
第一方面,提供了一种回转式传送装置,其包括基架、两个限位座、输送组件以及驱动组件。两个限位座间隔设置于基架上,且沿第一方向延伸。输送组件包括驱动轮、受动轮以及环状输送带。驱动轮以及受动轮分别设置于两个限位座的两端。环状输送带设置于驱动轮和受动轮,部分的环状输送带位于两个限位座之间,环状输送带被配置为承载载具。载具位于两个限位座之间,以限制载具在第二方向上的位移,第二方向与第一方向正交。驱动组件与驱动轮连接,以带动环状输送带循环输送。
[0006]
在一实施例中,回转式传送装置还包括张紧机构,张紧机构与输送组件连接,张紧机构包括基座、调整座、连接板、固定座以及张紧件。调整座沿着第一方向滑动设置于基座上,调整座连接受动轮。连接板设置于调整座。固定座固定设置于基座。张紧件两端分别连接连接板和固定座,张紧件通过调整调整座与固定座之间的距离,使环状输送带张紧。
[0007]
在一实施例中,两个限位座相对的两个表面中的一个或两个上设置有定位槽,定位槽沿着第一方向延伸,定位槽与载具的定位柱配合,以限制载具在第三方向上的位移,第三方向与第一方向以及第二方向正交。
[0008]
在一实施例中,回转式传送装置还包括止挡件,止挡件与基架固定连接,并位于环状输送带的下层部分的下方,且沿第一方向延伸,止挡件被配置于限制载具在第三方向上的位移,第三方向正交于第一方向以及第二方向。
[0009]
在一实施例中,环状输送带上间隔设置有多个连接件,每个连接件上可拆卸地连接一个载具。
[0010]
第二方面,提供了一种组装设备,其包括如第一方面所述的回转式传送装置以及工站装置。工站装置包括工站支架、工站座以及工站驱动模块。工站座设置于工站支架的一侧,工站座具有至少一个工站,工站处设有定位组件。工站驱动模块设置于工站支架上,工
站驱动模块被配置为在第二方向上驱动定位组件,使定位载具在第一方向上定位位于输送通道中的载具。
[0011]
在一实施例中,定位组件包括沿着第二方向延伸的两个定位杆,两个定位杆能够插置于载具相对的两侧,以在第一方向上定位载具。
[0012]
在一实施例中,两个定位杆中的至少一个具有倒角,倒角与载具一侧的随动器配合。
[0013]
在一实施例中,至少一个工站包括定位工站,定位工站包括第一载台、第一导轨、第一限位件、导向针、第一挡圈、第一弹性件以及第一驱动器。第一载台设置于该工站处的两个定位杆之间。第一导轨设置于第一载台上,第一导轨沿着第二方向延伸。第一限位件滑动设置于第一导轨上,第一限位件包括相对设置的两个第一抵接凸部。导向针可活动地穿设于第一限位件的两个第一抵接凸部。第一挡圈套固于导向针上并位于两个第一抵接凸部之间。第一弹性件套设于导向针,第一弹性件的两端抵接于第一挡圈和一个第一抵接凸部之间。第一驱动器设置于第一载台上,第一驱动器被配置为驱动第一限位件移动。
[0014]
在一实施例中,至少一个工站还包括检测工站,检测工站包括第二载台、第二导轨、第二限位件、探针、第二挡圈、第二弹性件、第二驱动器以及第一传感器。第二载台设置于该工站处的两个定位杆之间。第二导轨设置于第二载台上,第二导轨沿着第二方向延伸。第二限位件滑动设置于第二导轨上,第二限位件包括相对设置的两个第二抵接凸部。探针可活动地穿设于第二限位件的两个第二抵接凸部。第二挡圈套固于探针上并位于两个第一抵接凸部之间。第二弹性件套设于探针,第二弹性件的两端抵接于第二挡圈和一个第二抵接凸部之间。第二驱动器设置于第二载台上,第二驱动器被配置为驱动第二限位件移动。第一传感器设置于第二载台上,并位于探针的移动路径上,第一传感器被配置为传感探针。
[0015]
在一实施例中,至少一个工站还包括上料工站以及下料工站,上料工站、定位工站、检测工站以及下料工站沿着第一方向依序设置。
[0016]
在一实施例中,组装设备还包括第二传感器以及第三传感器。第二传感器设置于两个限位座中远离工站装置的一个,第二传感器被配置为传感载具上的工件,以判断载具是否到位。第三传感器设置于两个限位座中靠近工站装置的一个,第三传感器被配置传感载具上的遮断块,以判断载具是否到位。
[0017]
在本发明实施例中,回转式传送装置中的传输组件由驱动轮、受动轮以及环状输送带构成,并通过驱动组件在垂直于地面的平面上进行载具的循环输送,实现了产品组装以及载具回流的功效。如此一来,便能够解决自动化设备要使用两条传输线而导致空间利用率低下的问题。进一步地,回转式传送装置中的两个限位座限制了载具在第二方向上的位移,有效地提高了组装过程的精度。除此之外,组装设备中的定位工站以及检测工站可以分别对载具上的工件进行加工以及检测。进一步地,通过定位工站以及检测工站上的导向针以及探针可以确认组装是否出现异常,以提高组装质量并降低人工判断的需求。因此,回转式传送装置以及组装设备可以有效地利用空间,并提高自动组装的精度以及效率。
附图说明
[0018]
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0019]
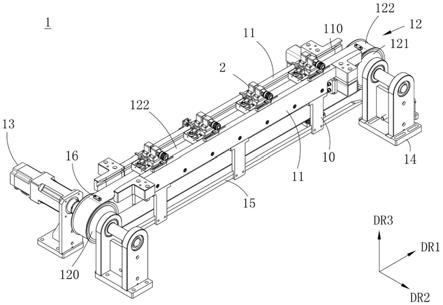
图1是本发明一实施例的回转式传送装置的立体图;
[0020]
图2是本发明一实施例的张紧机构的示意图;
[0021]
图3是本发明一实施例的组装设备的立体图;
[0022]
图4是本发明一实施例的工站装置的立体图;
[0023]
图5是本发明一实施例的定位工站的示意图;
[0024]
图6是本发明一实施例的工件的示意图;
[0025]
图7是本发明一实施例的检测工站的示意图;
[0026]
图8是本发明一实施例的组装设备的另一立体图;
[0027]
图9是图8中区域a的放大示意图;
[0028]
图10是本发明一实施例的载具的立体图;
[0029]
图11是本发明一实施例的载具的分解图;
[0030]
图12是图10的线段b-b’的截面图;
[0031]
图13是本发明一实施例的工件固定座的示意图;
[0032]
图14是本发明一实施例的工件固定座以及工件的示意图;
[0033]
图15是本发明另一实施例的工件固定座的示意图;以及
[0034]
图16是本发明另一实施例的工件固定座以及工件的示意图。
具体实施方式
[0035]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0036]
请参阅图1,其是本发明一实施例的回转式传送装置的立体图。如图所示,回转式传送装置1包括基架10、两个限位座11、输送组件12以及驱动组件13。两个限位座11间隔设置于基架10上,且沿第一方向dr1延伸。输送组件12包括驱动轮120、受动轮121以及环状输送带122。驱动轮120以及受动轮121分别设置于两个限位座11的两端。环状输送带122设置于驱动轮120和受动轮121上,且部分的环状输送带122位于两个限位座11之间。环状输送带122被配置为承载载具2。载具2位于两个限位座11之间,两个限位座11可以限制载具2在第二方向dr2上的位移,第二方向dr2与第一方向dr1正交。驱动组件13与驱动轮120连接,以带动环状输送带122循环输送。除此之外,环状输送带122可以分为上层部分以及下层部分。上层部分沿着第一方向dr1移动,且产品在上层部分进行组装。下层部分沿着相反于第一方向dr1的方向移动,且载具通过下层部分回流。如此一来,回转式传送装置1能够仅以一条传输线实现组装产品以及回流载具的功效。在下文中,将更详细地介绍回转式传送装置1中的各个部件。
[0037]
在一些实施例中,两个限位座11相对的两个表面中的至少一个上设置有定位槽110。定位槽110沿着第一方向dr1延伸,定位槽110与载具2的定位柱配合,以限制载具2在第三方向dr3上的位移,第三方向dr3与第一方向dr1以及第二方向dr2正交。换句话说,载具2的定位柱在定位槽110中仅能沿着第一方向dr1移动。亦即,在输送的过程中,载具2除了在第三方向dr3上的位置被固定,其在第二方向dr2上的位置也被固定。因此,实现了载具2的
高精度定位。另外,载具2的详细介绍将在后续的实施例中提及。
[0038]
在一些实施例中,驱动组件13可以包括基座、带减速器电机以及传动轴。基座设置于驱动轮120的一侧。带减速器电机设置于基座上,并通过传动轴连接驱动轮120。如此一来,带减速器电机通过传动轴带动位于驱动轮120上的环状输送带122循环输送。然而,本申请不限于此,驱动组件13也可以包括其他种类的电机。举例来说,在其他实施例中,电机也可以是使用交流电或是直流电的大扭力电机。
[0039]
请一并参阅图2,其是本发明一实施例的张紧机构的示意图。如图所示,在一些实施例中,回转式传送装置1还可以包括张紧机构14,张紧机构14与输送组件12连接。张紧机构14包括基座140、调整座141、连接板142、固定座143以及张紧件144。调整座141沿着第一方向dr1滑动设置于基座140上,调整座141连接受动轮121。连接板142设置于调整座141。固定座143固定设置于基座140。张紧件144的两端分别连接连接板142和固定座143。张紧件144通过调整调整座141与固定座143之间的距离,使环状输送带122张紧。具体来说,张紧件144与固定座143之间的距离可以通过螺栓相对于螺母的旋进程度来调节。
[0040]
举例而言,当调整座141远离固定座143时,调整座141带动受动轮121沿着相反于第一方向dr1的方向移动。换句话说,受动轮121会朝向驱动轮120靠近。如此一来,位在受动轮121以及驱动轮120上的环状输送带122会出现松弛。或者,当调整座141靠近固定座143时,调整座141带动受动轮121沿着第一方向dr1移动。换句话说,受动轮121会朝向驱动轮120远离。如此一来,位在受动轮121以及驱动轮120上的环状输送带122会出现张紧。因此,回转式传送装置1可以通过张紧机构14调节环状输送带122的松弛或是张紧,以使输送过程更加顺畅。除此之外,当需要更换新的调节环状输送带122时,可以先通过张紧机构14使旧的环状输送带122松弛,并更换新的调节环状输送带122。最后,可以通过张紧机构14使新的环状输送带122张紧。
[0041]
请复参阅图1,在一些实施例中,回转式传送装置1还可以包括止挡件15,止挡件15与基架10固定连接,并位于环状输送带122的下层部分的下方,且沿第一方向dr1延伸。止挡件15被配置于限制载具2在第三方向dr3上的位移。止挡件15的数量可以是一个或是两个。具体地说,止挡件15用于托住环状输送带122的下层部位的载具2,避免载具2在回流过程中朝向地面掉落。或者,避免载具2在回流过程中朝向地面下垂,使得环状输送带122拉伸而导致定位精确度下降。
[0042]
在一些实施例中,环状输送带122上还可以间隔设置有多个连接件16,每个连接件上可拆卸地连接一个载具2。更具体地,连接件16可以是凸块,凸块与载具2下方的连接槽相对应。如此一来,连接件16可以与载具2互相卡合,但本发明不限于此。举例来说,连接件16还可以通过螺丝、卡榫、磁力吸附等本领域的普通技术人员所认知的方式与载具2可拆卸地连接。
[0043]
请参阅图3以及图4,其分别是本发明一实施例的组装设备以及工站装置的立体图。如图所示,组装设备包括回转式传送装置1以及工站装置3。本实施例中的回转式传送装置1可以与上述实施例中的回转式传送装置1相似或是相同,因此不再赘述。工站装置3包括工站支架30、工站座31以及工站驱动模块32。工站座31设置于工站支架30的一侧,工站座31具有至少一个工站33,工站33处设有定位组件34。工站驱动模块32设置于工站支架30上,工站驱动模块32被配置为在第二方向dr2上驱动定位组件34,使定位组件34在第一方向dr1上
定位位于两个限位座11中的载具2。在本实施例中,定位组件34沿着第二方向dr2靠近位于回转式传送装置1上的载具2,以固定载具2进行加工。或者,定位组件34沿着相反于第二方向dr2的方向远离位于回转式传送装置1上的载具2,以解除固定并继续输送载具2。换句话说,本实施例的工站装置3可以配合回转式传送装置1进行组装作业,实现自动化组装的功效。在下文中,将更详细地介绍工站装置3中的各个部件。
[0044]
在一些实施例中,工站驱动模块32可以包括驱动器以及驱动轴。驱动器设置在工站支架30上,且驱动轴的两端分别连接驱动器以及定位组件34。举例来说,驱动器可以是汽缸,其通过将压缩空气的压力转换为机械能,驱动定位组件34直线(亦即,第二方向dr2)往复运动。或者,驱动器也可以是油压缸或是电动马达等具有相同或相似效果的元件,以实现相同功效。
[0045]
在一些实施例中,定位组件34可以包括沿着第二方向dr2延伸的两个定位杆340,两个定位杆340能够插置于载具2相对的两侧,以在第一方向dr1上定位载具2。换句话说,当定位组件34靠近载具2时,定位组件34上的两个定位杆340会与载具2容置定位,使载具2不会在第一方向dr1上移动。如此一来,便能够精确地定位载具2。
[0046]
除此之外,在一些实施例中,两个定位杆340中的至少一个可以具有倒角3400。亦即,两个定位杆340中的一个具有倒角3400,或者两个定位杆340都具有倒角3400。倒角3400与载具2一侧的随动器配合。倒角3400的角度可以是15度、30度、45度、60度或是75度,但本发明不限于此。在其他实施例中,倒角3400的角度可以在大于0度且小于90度之间,并根据实际情况配置。
[0047]
请参阅图4以及图5,图5是本发明一实施例的定位工站的示意图。如图所示,在一些实施例中,至少一个工站33可以包括定位工站330,定位工站330包括第一载台3300、第一导轨3301、第一限位件3302、导向针3303、第一挡圈3304、第一弹性件3305以及第一驱动器3306。
[0048]
第一载台3300设置于该工站33处的两个定位杆340之间。第一导轨3301设置于第一载台3300上,第一导轨3301沿着第二方向dr2延伸。第一限位件3302滑动设置于第一导轨3301上,第一限位件3302包括相对设置的两个第一抵接凸部33020。导向针3303可活动地穿设于第一限位件3302的两个第一抵接凸部33020。第一挡圈3304套固于导向针3303上并位于两个第一抵接凸部33020之间。第一弹性件3305套设于导向针3303,第一弹性件3305的两端抵接于第一挡圈3304和一个第一抵接凸部33020之间。第一驱动器3306设置于第一载台3300上,第一驱动器3306被配置为驱动第一限位件3302移动。举例来说,第一驱动器3306可以是汽缸,其通过将压缩空气的压力转换为机械能,驱动第一限位件3302直线往复运动。或者,第一驱动器3306也可以是油压缸或是电动马达等具有相同或相似效果的元件,以实现相同功效。为使定位工站330更加浅显易懂,下文中将详细描述定位工站330的运作。
[0049]
请请参阅图4、图5以及图6,图6是本发明一实施例的工件的示意图。第一驱动器3306驱动第一限位件3302沿着第一导轨3301(亦即,沿着第二方向dr2)移动,以使第一限位件3302靠近位于回转式传送装置1上的载具2。当第一限位件3302上的导向针3303进入到载具2上的工件4内部时,工件4被导向针3303固定以防止窜动。如此一来,经固定的工件4可以被高精度地加工。举例来说,在本实施例中,工件4是高速连接器,其穿设有连接孔40。连接孔40一端40b被导向针3303固定后,连接端子被安装在另一端40a中。然而,本发明不限于
此,在其他实施例中,工件4也可以是具有相似形状的其他产品。
[0050]
另一方面,当第一限位件3302进入到工件4的连接孔40中并抵住工件4的一部分时,第一驱动器3306仍在推动第一限位件3302移动。此时,无法前进的导向针3303相对于第一限位件3302向后移动(亦即,相反于第二方向dr2),使得第一弹性件3305被压缩。随着第一驱动器3306驱动第一限位件3302返回,套设于导向针3303的第一弹性件3305释放压缩力量,以使导向针3303复位。除此之外,第一挡圈3304用于限位第一弹性件3305,以使导向针3303复位时不超出初始位置。
[0051]
在一些情况下,当导向针3303由于偏差而未进入到工件4的连接孔40时(例如,抵住连接孔40的周围),导向针3303可能会相对于第一限位件3302向后移动更多的距离。因此,在一些实施例中,定位工站330还可以包括传感器,例如光学传感器。传感器可以设置于第一载台3300上,并位于导向针3303的移动路径上(也可以解读成导向针3303位于传感器的移动路径上)。当第一限位件3302抵住工件4(并非位于连接孔40中)而停止移动时,传感器会随着第一限位件3302沿着第二方向dr2继续移动。由于导向针3303位于传感器的移动路径上,如此一来,移动的传感器被静止的导向针3303所遮蔽。此时,作业人员或是控制系统就能通过传感器的回馈判断定位失败。应当注意的是,上述的说明仅是示例,本发明不限于此。举例来说,在一些实施例中,作业人员或是控制系统并非通过传感器是否被遮蔽来判断异常,而是通过传感器是否提早被遮蔽来判断异常。举例来说,在定位正常的情况下,传感器可能在特定时间后被遮断。然而,在定位失败的情况下,传感器可能在早于特定时间就被遮断。因此,可以通过传感器提早被遮断来判断异常。
[0052]
请参阅图4以及图7,图7是本发明一实施例的检测工站的示意图。如图所示,在一些实施例中,至少一个工站33还包括检测工站331,检测工站331包括第二载台3310、第二导轨3311、第二限位件3312、探针3313、第二挡圈3314、第二弹性件3315、第二驱动器3316以及第一传感器3317。
[0053]
第二载台3310设置于该工站33处的两个定位杆340之间。第二导轨3311设置于第二载台3310上,第二导轨3311沿着第二方向dr2延伸。第二限位件3312滑动设置于第二导轨3311上,第二限位件3312包括相对设置的两个第二抵接凸部33120。探针3313可活动地穿设于第二限位件3312的两个第二抵接凸部33120。第二挡圈3314套固于探针3313上并位于两个第二抵接凸部33120之间。第二弹性件3315套设于探针3313,第二弹性件3315的两端抵接于第二挡圈3314和一个第二抵接凸部33120之间。第二驱动器3316设置于第二载台3310上,第二驱动器3316被配置为驱动第二限位件3312移动。举例来说,第二驱动器3316可以是汽缸,其通过将压缩空气的压力转换为机械能,驱动第二限位件3312直线往复运动。或者,第二驱动器3316也可以是油压缸或是电动马达等具有相同或相似效果的元件,以实现相同功效。第一传感器3317设置于第二载台3310上,并位于探针3313的移动路径上(也可以解读成探针3313位于第一传感器3317的移动路径上)。第一传感器3317被配置为传感探针3313。为使检测工站331更加浅显易懂,下文中将详细描述检测工站331的运作。
[0054]
第二驱动器3316驱动第二限位件3312沿着第二导轨3311(亦即,沿着第二方向dr2)移动,以使第二限位件3312靠近位于回转式传送装置1上的载具2。当第二限位件3312上的探针3313进入到载具2上的工件4内部时,探针3313会接触到经组装的端子。此时,第一驱动器3306仍在推动第一限位件3302移动。无法前进的探针3313相对于第二限位件3312向
后移动(亦即,相反于第二方向dr2),使得第二弹性件3315被压缩。随着第二驱动器3316驱动第二限位件3312返回,套设于探针3313的第二弹性件3315释放压缩力量,以使探针3313复位。除此之外,第二挡圈3314用于限位第二弹性件3315,以使探针3313复位时不超出初始位置。
[0055]
另一方面,当探针3313抵住连接孔40中的端子而停止移动时,第一传感器3317会随着第二限位件3312沿着第二方向dr2移动。由于探针3313位于第一传感器3317的移动路径上,因此,移动的第一传感器3317会被静止的探针3313所遮蔽。此时,作业人员或是控制系统就能通过传感器的回馈判断组装的结果。举例来说,当工件4未成功组装端子时,探针3313不会抵住端子而继续前进。如此一来,第一传感器3317可能不会被探针3313的一端所遮蔽,或是较晚才会被探针3313的一端所遮蔽。因此,作业人员或是控制系统就能通过第一传感器3317的回馈判断组装结果异常。
[0056]
请复阅图4。在一些实施例中,至少一个工站33还可以包括上料工站332以及下料工站333。其中,上料工站332、定位工站330、检测工站331以及下料工333站沿着第一方向dr1依序设置。上料工站332用于将未组装的工件4放置于载具2上。下料工站333用于将经组装的工件4从载具2上取下。当环状输送带122的上层部分沿着第一方向dr1移动时,位于环状输送带122上的载具2会依序进行上料、定位、检测以及下料四个制程。也就是说,通过上述的四个工站33,本发明可以实现自动组装的功效。
[0057]
请参阅图8以及图9,其分别是本发明一实施例的组装设备的另一立体图以及图8中的区域a的放大示意图。如图所示,在一些实施例中,组装设备还可以包括第二传感器35。第二传感器35设置于两个限位座11中远离工站装置3的一个,第二传感器35被配置为感测载具2上的工件4,以判断载具2是否到位。举例来说,第二传感器35可以是红外线传感器。当第二传感器35侦测到载具2上的工件4已移至其上方时,第二传感器35可以发出信号至组装设备的控制系统,以停止环状输送带122的运行。
[0058]
除此之外,在一些实施例中,组装设备还可以包括第三传感器36。第三传感器36设置于两个限位座11中靠近工站装置3的一个,第三传感器36被配置感测载具2上的遮断块,以判断载具2是否到位。举例来说,第三传感器36可以是光学传感器。当第三传感器36被载具2上的遮断块遮蔽,第三传感器36可以发出信号至组装设备的控制系统,以停止环状输送带122的运行。
[0059]
请参阅图10至图12,其分别是本发明一实施例的载具的立体图、分解图以及图10的线段b-b’的截面图。如图所示,载具2包括基座20、工件安装座21以及随动器22。基座20具有凹槽200。工件安装座21沿着第一方向dr1滑动设置于凹槽200。随动器22沿着第一方向dr1设置于工件安装座21的一侧。
[0060]
在本实施例中,随动器22可以与工站装置3的定位组件34配合。具体来说,当工站驱动模块32驱动定位组件34的两个定位杆340靠近载具2时,两个定位杆340中的一个会与随动器22接触。在接触时,随动器22会沿着定位杆340上的倒角3400调整其在第一方向dr1上的位置。也就是说,设置于工件安装座21上的随动器22通过接触定位杆340上的倒角3400,带动工件安装座21在凹槽200中滑动。如此一来,工件安装座21与工站33之间的相对位置能够通过随动器22与定位杆340来调整。
[0061]
在一些实施例中,载具2还可以包括导轨23以及滑块24,导轨23以及滑块24沿着第
一方向dr1设置于凹槽200中。另外,工件安装座21包括滑动座210以及工件固定座211。滑动座210通过滑块24可滑动地设置于导轨23上。工件固定座211可拆卸地设置于滑动座210上,并用于固定工件4。应当注意的是,图中所示出的工件固定座211的样式仅是示例。在实际使用中,载具2可以通过更换不同的工件固定座211以对应于不同的工件。下文中将提供两种不同的实施例,以使工件固定座211的说明更加浅显易懂。
[0062]
请一并参阅图13以及图14,其分别是本发明一实施例的工件固定座以及工件的示意图。如图所示,在一些实施例中,工件固定座211可以具有朝向第二方向dr2的固定穿槽2110a以及穿孔2111a,穿孔2111a以及固定穿槽2110a对应于工件4a的一端。更具体地,固定穿槽2110a套设于工件4a的连接部41a,以固定工件4a。穿孔2111a套设于工件4a的定位端42a。在组装过程中,工件4a的定位端42a会被导向针3303或是探针3313穿过,而另一端则会被安装连接端子。
[0063]
除此之外,请一并参阅图15以及图16,其分别是本发明另一实施例的工件固定座以及工件的示意图。如图所示,在其他实施例中,工件固定座211可以具有朝向第二方向dr2的固定穿槽2110b以及穿孔2111b,穿孔2111b以及固定穿槽2110b对应于工件4b的一端。更具体地,固定穿槽2110b套设于工件4b的连接部41b,以固定工件4b。穿孔2111b套设于工件4b的定位端42b。在组装过程中,工件4b的定位端42b会被导向针3303或是探针3313穿过,而另一端则会被安装连接端子。如此一来,载具2可以通过更换不同的工件固定座211以对应于不同的工件。
[0064]
请复参阅图10至图12。在一些实施例中,随动器22包括滚轮220以及连接杆221,连接杆221设置于滑动座210,滚轮220设置于连接杆221远离滑动座210的一端。滚轮220可以与组装设备的定位杆340顺畅地配合,以减少接触时的摩擦力。然而,本发明不限于此,在其他的实施例中,随动器22可以包括具有倒角的连接杆。随动器22的连接杆可以通过倒角与定位杆340的倒角3400配合,实现调整工件固定座211位置的功效。
[0065]
如图12所示,在一些实施例中,基座20还具有第一侧壁20a以及第二侧壁20b,第一侧壁20a与第二侧壁20b在第一方向dr1上彼此相对。除此之外,载具2还包括第一限位件25以及弹性件26。第一限位件25穿设于基座20的第一侧壁20a上并延伸至凹槽200中。弹性件26套设于第一限位件25,且弹性件26的两端抵接于工件安装座21或是滑块24和第一侧壁20a之间。在本实施例中,弹性件26的两端抵接于滑块24和第一侧壁20a之间。然而,本发明不限于此,在其他实施例中,当工件安装座21直接设置于导轨23上时,则弹性件26的两端抵接于工件安装座21和第一侧壁20a之间。
[0066]
弹性件26用于提高整个载具的阻尼。具体地说,当随动器22与组装设备的定位杆340接触时,与随动器22连接的工件安装座21可能会因为接触而晃动。此时,弹性件26可以通过压缩吸收晃动。除此之外,工件安装座21也可能会因为接触的作用力而沿着第一方向dr1远离定位杆340。因此,弹性件26还可以抵住滑块24,使与滑块24连接的随动器22持续抵住定位杆340。另外,第一限位件25则是用做弹性件26的导向功能。
[0067]
在一些实施例中,载具2还可以包括第二限位件27,第二限位件27穿设于基座20的第二侧壁20b上并延伸至凹槽200中。第二限位件27被配置为约束工件安装座21。具体来说,第二限位件27被配置为限制位于滑块24上的工件安装座21在第一方向dr1上的移动。
[0068]
如图10以及图11所示,在一些实施例中,基座140还具有第三侧壁20c以及第四侧
壁(未示出),第三侧壁20c与第四侧壁在第二方向dr2上彼此相对,第二方向dr2与第一方向dr1正交,第三侧壁20c或/和第四侧壁上设置有定位柱201。定位柱201对应于回转式传送装置1的两个限位座11的定位槽110。更具体地说,当载具2随着环状输送带122移动至上层部分时,载具2的定位柱201会进入到定位槽110中,使得载具2在第三方向dr3上的移动被限制。
[0069]
在一些实施例中,载具2还包括连接槽,连接槽设置于基座140的底面。连接槽对应于回转式传送装置1的连接件16。更具体地,在上述实施例中,连接件16可以是凸块。因此,载具2下方的连接槽与连接件16相对应。如此一来,载具2可以与连接件16互相卡合。
[0070]
在一些实施例中,载具2还可以包括遮断块28,遮断块28设置于工件安装座21上,并且位于工件安装座21靠近随动器22的一侧。遮断块28被配置遮断工站装置3上的第三传感器36,以判断载具2是否到位。当第三传感器36被载具2上的遮断块遮蔽,第三传感器36可以发出信号至组装设备的控制系统,以停止环状输送带122的运行。
[0071]
在一些实施例中,载具2还可以包括挡条29,挡条29设置于工件安装座21远离随动器22的一侧上。挡条29的一端或两端设置有倒角290。挡条29的倒角290可以与定位杆340的倒角3400配合,实现调整工件固定座211位置的功效。
[0072]
综上所述,回转式传送装置中的传输组件由驱动轮、受动轮以及环状输送带构成,并通过驱动组件在垂直于地面的平面上进行载具的循环输送,实现了产品组装以及载具回流的功效。如此一来,便能够解决自动化设备要使用两条传输线而导致空间利用率低下的问题。进一步地,回转式传送装置中的两个限位座限制了载具在第二方向上的位移,有效地提高了组装过程的精度。除此之外,组装设备中的定位工站以及检测工站可以分别对载具上的工件进行加工以及检测。进一步地,通过定位工站以及检测工站上的导向针以及探针可以确认组装是否出现异常,以提高组装质量并降低人工判断的需求。因此,回转式传送装置以及组装设备可以有效地利用空间,并提高自动组装的精度以及效率。
[0073]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
[0074]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1