一种喷水效果检测装置、变电站水冲洗机器人及方法
1.本发明涉及变电站自动化控制领域,具体涉及一种喷水效果检测装置、变电站水冲洗机器人及方法。
背景技术:
2.电网输变电设备绝缘子在长期运行中,大气中的尘埃微粒沉积到其表面形成污秽层,在干燥气象条件下,污秽层电阻很大,绝缘性能不会降低,但在雾、露、雨、雪等气象条件下,污秽层中的电解质湿润后,使表面电导率增加,绝缘性能下降,从而使其憎水性下降,造成绝缘子湿润表面的闪络放电,简称污闪,危及电网的运行安全。
3.为了掌握绝缘子表面污秽物的严重程度、及时消除事故隐患,电力部门需要定期对绝缘子进行监测并进行污秽物清理。带电水冲洗工作作为电气设备有效防止污闪事故的措施之一被广泛采用。但在水冲洗工作结束后,绝缘子表面污秽物是否冲洗完全需要进行检测,以此来判断冲洗的结果。
4.传统检测绝缘子憎水性的方法通常采用简单喷水装置并且结合人工经验完成分级判断,某些电网公司已设计出的电动喷水装置也均为手持性设备,需要工人攀爬杆塔进行作业,该过程检测效率低下且危险系数较高。
技术实现要素:
5.针对上述存在的问题,本发明的目的在于提供一种安全可靠,简便直观,且在不需要将绝缘子取下的条件下即可自动检测和远程控制的变电站水冲洗机器人喷水效果检测装置、包括该装置的变电站水冲洗机器人及方法。
6.为了实现上述目的,本发明所采用的技术方案如下:
7.第一方面,本发明提供了一种变电站水冲洗机器人喷水效果检测装置,包括喷水单元、拍摄单元、空心绝缘杆和机械臂连接单元;所述的喷水单元与拍摄单元均布置在空心绝缘杆的一端,且拍摄单元位于喷水单元的上方,所述的拍摄单元包括图片采集装置和测距仪,所述的图片采集装置采集绝缘子片图片,所述的测距仪可实时测量水冲洗机器人效果检测装置到绝缘子片的距离;所述的数码摄像机、测距仪与信号采集及处理装置相连,所述的信号采集及处理装置与上位机相连;所述的喷水单元与控制系统相连,控制系统与上位机相连。
8.进一步的,所述的信号采集及处理装置内设有憎水性检测模块,所述的憎水性检测模块对绝缘子串的憎水性进行评级,并将评价结果发送到上位机。
9.第二方面,本发明还提供了一种变电站水冲洗机器人,包括所述的变电站水冲洗机器人喷水效果检测装置。在空心绝缘杆的另一端安装有机械臂连接单元,所述的机械臂连接单元与机器人相连。
10.第三方面,本发明还提供了一种利用变电站水冲洗机器人对喷水效果检测进行检测方法,如下:
11.(1)通过测距仪确定目标检测点的位置,并将位置信息传输到上位机,上位机控制变电站机器人带动检测装置移动到检测位置;
12.(2)通过图片采集装置对喷水前绝缘子图片进行采集,并发送给信号采集及处理装置,图像采集装置发送给上位机;
13.(4)上位机通过控制系统控制喷水单元进行喷水,达到指定时间后喷头自动停止工作;
14.(5)图片采集装置对喷水后的绝缘子图片进行采集,并发送给信号采集及处理装置,图像采集装置发送给上位机;
15.(6)憎水性检测模块对获取到的绝缘子片图片进行预处理、变化检测、边缘提取、特征提取,选取标准的憎水性分类等级hc1~7级的绝缘子,提取标准分级的水珠与水迹的特征,获得hc1~7级对应的特征分级,依据标准分级对目标绝缘子的水珠与水迹特征进行分类,目标绝缘子的憎水性等级属于与其水珠与水迹特征最相似的分级标准,从而判定目标绝缘子的憎水性等级,由此判断变电站水冲洗机器人喷水效果的检测。
16.本发明的有益效果:
17.本发明利用图像采集装置进行采集现场图像,并对测距仪发出的光斑进行自动识别,进而确定检测装置要检测的位置;并通过机器视觉相关算法实现了对水冲洗机器人冲洗效果检测装置的视觉引导控制,有效提高了冲洗作业的准确性。
18.本发明可现场完成对于水冲洗机器人喷水效果的检测,不必拆卸绝缘子,绝缘子的憎水性分级通过上位机判定而不是人,有效的提高了检测的准确度。
附图说明
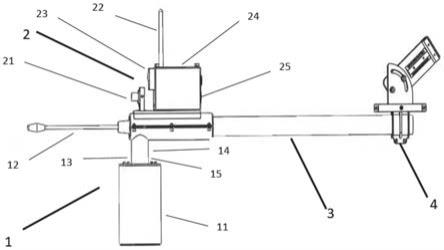
19.图1为本发明整体结构示意图;
20.图2为本发明中确定检测位置的流程图;
21.图3为本发明提出的检测方法总流程图;
22.图中:1喷水单元,2拍摄单元,3空心绝缘管,4机械臂连接单元;11储水箱、12喷头、13微型电泵,14可充电电源,15连接筒;16连接附件;21微型数码摄像机、22无线通讯器、23测距仪、24可充电电源。
具体实施方式
23.下面结合附图和实施例对本发明做进一步的说明:
24.如图1所示,本实施例公开的变电站水冲洗机器人喷水效果检测装置由喷水单元1、拍摄单元2、空心绝缘管3和机械臂连接单元4组成,喷水单元1与拍摄单元2分别布置在空心绝缘杆3的一端,且拍摄单元2在喷水单元1的上方,机械臂连接单元4布置在空心绝缘杆3的另一端,通过将上述三个单元集成在空心绝缘杆3上,实现了通过水冲洗机器人检测操作。所述的数码摄像机、测距仪与信号采集及处理装置相连,所述的信号采集及处理装置与上位机相连;所述的喷水单元与控制系统相连,控制系统与上位机相连。
25.其中,所述的喷水单元1包括储水箱11、喷头12、微型电泵13和可充电电源14,微型电泵13与可充电电源14封装于连接筒15中,并通过导线与无线信号接收和车载控制器相连。连接筒15通过连接附件16与储水箱11和喷头12连接,微型电泵13通过输水管道与储水
42.s4:通过对坐标偏差的值进行判断,当δx的绝对值小于给定阈值t,检测装置停止横向运动,当δx大于t则控制检测装置向右运动,当δx小于
‑
t则控制检测装置向左运动;当δy的绝对值小于给定阈值t,检测装置停止纵向运动,当δy大于t则控制检测装置向下运动,当δy小于
‑
t则控制检测装置向上运动;
43.(2)通过图片采集装置对喷水前绝缘子图片进行采集,并发送给信号采集及处理装置,图像采集装置发送给上位机;
44.(4)上位机通过控制系统控制喷水单元进行喷水,达到指定时间后喷头自动停止工作;
45.(5)图片采集装置对喷水后的绝缘子图片进行采集,并发送给信号采集及处理装置,图像采集装置发送给上位机;
46.(6)憎水性检测模块对获取到的绝缘子片图片进行预处理、变化检测、边缘提取、特征提取,选取标准的憎水性分类等级hc1~7级的绝缘子,提取标准分级的水珠与水迹的特征,获得hc1~7级对应的特征分级,依据标准分级对目标绝缘子的水珠与水迹特征进行分类,目标绝缘子的憎水性等级属于与其水珠与水迹特征最相似的分级标准,从而判定目标绝缘子的憎水性等级,由此判断变电站水冲洗机器人喷水效果的检测。
47.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种喷水效果检测装置,其特征在于,包括喷水单元、拍摄单元和空心绝缘杆;所述的喷水单元与拍摄单元均布置在空心绝缘杆的一端,且拍摄单元位于喷水单元的上方,所述的拍摄单元包括图片采集装置和测距仪,所述的图片采集装置采集绝缘子片图片,所述的测距仪可实时测量水冲洗机器人效果检测装置到绝缘子片的距离;所述的图片采集装置、测距仪与信号采集及处理装置相连,所述的信号采集及处理装置与上位机相连;所述的喷水单元与控制系统相连,控制系统与上位机相连。2.如权利要求1所述的喷水效果检测装置,其特征在于,所述的喷水单元包括储水箱、喷头、微型电泵和连接筒,所述的储水箱通过连接筒与空心绝缘杆相连,微型电泵安装在连接筒内,微型电泵用于将储水箱内的水泵入喷头,所述喷头安装在空心绝缘杆上,喷头的喷射方向与测距仪发射方向相同。3.如权利要求2所述的喷水效果检测装置,其特征在于,所述的微型电泵与可充电电源相连。4.如权利要求1所述的喷水效果检测装置,其特征在于,所述的微型电泵通过无线装置与控制系统通讯。5.如权利要求1所述的喷水效果检测装置,其特征在于,所述的信号采集及处理装置与上位机之间通过无线通讯。6.如权利要求1所述的喷水效果检测装置,其特征在于,所述的信号采集及处理装置包括憎水性检测模块,所述的憎水性检测模块对绝缘子串的憎水性进行评级。7.如权利要求1所述的喷水效果检测装置,其特征在于,所述的空心绝缘杆材料为玻璃纤维增强环氧树脂基复合材料。8.一种变电站水冲洗机器人,其特征在于,包括权利要求1
‑
7任一所述的喷水效果检测装置。9.如权利要求8所述的变电站水冲洗机器人,其特征在于,在空心绝缘杆的另一端安装有机械臂连接单元,所述的机械臂连接单元与机器人相连。10.如权利要求8
‑
9任一所述的变电站水冲洗机器人对喷水效果检测进行检测方法,其特征在于,如下:(1)通过测距仪确定目标检测点的位置,并将位置信息传输到上位机,上位机控制变电站机器人带动检测装置移动到检测位置;(2)通过图片采集装置对喷水前绝缘子图片进行采集,并发送给信号采集及处理装置,图像采集装置发送给上位机;(4)上位机通过控制系统控制喷水单元进行喷水,达到指定时间后喷头自动停止工作;(5)图片采集装置对喷水后的绝缘子图片进行采集,并发送给信号采集及处理装置,图像采集装置发送给上位机;(6)憎水性检测模块对获取到的绝缘子片图片进行预处理、变化检测、边缘提取、特征提取,选取标准的憎水性分类等级hc1~7级的绝缘子,提取标准分级的水珠与水迹的特征,获得hc1~7级对应的特征分级,依据标准分级对目标绝缘子的水珠与水迹特征进行分类,目标绝缘子的憎水性等级属于与其水珠与水迹特征最相似的分级标准,从而判定目标绝缘子的憎水性等级,由此判断变电站水冲洗机器人喷水效果的检测。
技术总结
本发明公开了一种喷水效果检测装置、变电站水冲洗机器人及方法,装置包括喷水单元、拍摄单元、空心绝缘杆和机械臂连接单元;喷水单元与拍摄单元均布置在空心绝缘杆的一端,且拍摄单元在喷水单元的上方,机械臂连接单元布置在绝缘杆的另一端;通过将上述三个单元集成在空心绝缘杆上,实现了通过水冲洗机器人检测操作,结构简单,操作方便,且节约人力。且节约人力。且节约人力。
技术研发人员:鲁守银 李志鹏 隋首钢 王涛 高焕兵 汤承龙
受保护的技术使用者:山东建筑大学
技术研发日:2021.09.07
技术公布日:2021/12/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1