一种视觉跟随点胶系统设备的制作方法
1.本实用新型涉及金属机械点胶技术领域,具体为一种视觉跟随点胶系统设备。
背景技术:
2.在传统的机械点胶加工中,点胶主要靠人工手工完成点胶,没有成熟设备,人工产能约350
‑
400pcs/h,效率低,用工成本高,管理难;
3.在现有点胶加工设备中,点胶主要由人工取料装夹,设备完成点胶,人工产能约350
‑
400pcs/h,通过输送带输送到点胶位置,输送带停下来原后单点打胶,原后再输送走,生产效率低,打胶覆盖不完整,且有可能会导致密封不够好。
技术实现要素:
4.本实用新型的目的在于提供一种视觉跟随点胶系统设备,具备生产效率高、降低生产成本的优点,解决了传统点胶加工设备生产效率低、打胶覆盖不完整,降低密封性,用工成本高的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种视觉跟随点胶系统设备,包括机架以及安装在机架上的跟随移动模组机构,所述机架上设有输送线,所述跟随移动模组机构设于输送线的中间位置;
6.所述机架对应跟随移动模组机构的点胶端设有相机,所述跟随移动模组机构的点胶端对应输送线通过点胶阀升降滑台气缸设有点胶阀,所述输送线对应相机下方和跟随移动模组机构的前端分别设有输送线传感器一和输送线传感器二;
7.所述机架上对应点胶阀的输入端设有打胶桶,所述打胶桶通过气管连接有气动三联体,所述打胶桶设于输送线的输入端。
8.进一步的,所述机架对应输送线的输入端设有对输送线驱动的电机,所述电机固定安装在机架上。
9.进一步的,所述打胶桶采用内置有增压气缸、换向电磁阀、调压阀的打胶容器结构设置。
10.进一步的,所述相机通过支撑架配合微调滑台对应输送线的上方设置,所述相机上设有相机光源。
11.进一步的,所述跟随移动模组机构和电机的输入端连接有控制组件,所述控制组件固定安装在机架上,所述控制组件对应跟随移动模组机构设有急停按键。
12.与现有技术相比,本实用新型的有益效果如下:
13.1、本实用新型输送线上通过相机、输送线传感器一和输送线传感器二配合跟随移动模组机构点胶生产,实现工件通过输送线自动运输,自动检测定位,自动跟随移动打胶,提高生产效率,降低生产成本。
附图说明
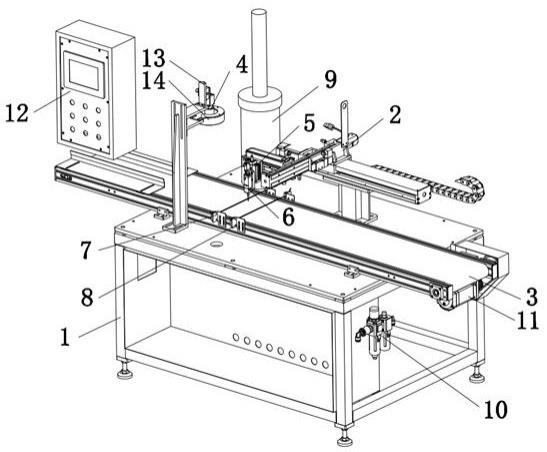
14.图1为本实用新型整体结构示意图。
15.图中:1、机架;2、跟随移动模组机构;3、输送线;4、相机;5、点胶阀升降滑台气缸;6、点胶阀;7、输送线传感器一;8、输送线传感器二;9、打胶桶;10、气动三联体;11、电机;12、控制组件;13、微调滑台;14、相机光源。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.请参阅图1,一种视觉跟随点胶系统设备,包括机架1以及安装在机架1上的跟随移动模组机构2,所述机架1上设有输送线3,所述跟随移动模组机构2设于输送线3的中间位置;
18.所述机架1对应跟随移动模组机构2的点胶端设有相机4,所述跟随移动模组机构2的点胶端对应输送线3通过点胶阀升降滑台气缸5设有点胶阀6,点胶阀升降滑台气缸5对点胶阀6升降断丝作用及工件差异高度调节。所述输送线3对应相机4下方和跟随移动模组机构2的前端分别设有输送线传感器一7和输送线传感器二8;输送线传感器一7检测工件位于ccd触发位,触发相机4进行拍照,输送线传感器二8对整个系统清料作用。
19.所述机架1上对应点胶阀6的输入端设有打胶桶9,所述打胶桶9通过气管连接有气动三联体10,所述打胶桶9设于输送线3的输入端。
20.具体的,所述机架1对应输送线3的输入端设有对输送线3驱动的电机11,所述电机11固定安装在机架1上。输送线3用于运送工件的流转,电机11为输送线3提供运行动力源。
21.具体的,所述跟随移动模组机构2和电机11的输入端连接有控制组件12,所述控制组件12固定安装在机架1上,所述控制组件12对应跟随移动模组机构2设有急停按键。
22.具体的,所述相机4通过支撑架配合微调滑台13对应输送线3的上方设置,所述相机4上设有相机光源14。
23.具体的,所述打胶桶9采用内置有增压气缸、换向电磁阀、调压阀的打胶容器结构设置。通过打胶桶9为点胶阀6提供源源不断的胶,实现连续供应。
24.生产时:可以根据生产需要在机架对应跟随移动模组机构的上方设置围墙结构、由多条铝型材拼装而成、设有两端活动门、前后左右上设有亚克力板的防护罩,通过控制组件12对跟随移动模组机构2和电机11驱动运行,工件由输送线3输送至输送线传感器一7位置时,相机4对工件进行拍照,相机4的输出端对照片进行信息采集,系统计算精准输出工件姿态位置及工件位于输送线3所在的位置,输送线传感器一7检测工件位于ccd触发位,触发相机4进行拍照,输送线传感器二8对整个系统清料作用,打胶桶9为点胶阀6提供源源不断的胶,实现连续供应,输送线3上通过相机4、输送线传感器一7和输送线传感器二8配合跟随移动模组机构2点胶生产,实现工件通过输送线3自动运输,自动检测定位,自动跟随移动打胶,提高生产效率,降低生产成本。
技术特征:
1.一种视觉跟随点胶系统设备,包括机架(1)以及安装在机架(1)上的跟随移动模组机构(2),其特征在于:所述机架(1)上设有输送线(3),所述跟随移动模组机构(2)设于输送线(3)的中间位置;所述机架(1)对应跟随移动模组机构(2)的点胶端设有相机(4),所述跟随移动模组机构(2)的点胶端对应输送线(3)通过点胶阀升降滑台气缸(5)设有点胶阀(6),所述输送线(3)对应相机(4)下方和跟随移动模组机构(2)的前端分别设有输送线传感器一(7)和输送线传感器二(8);所述机架(1)上对应点胶阀(6)的输入端设有打胶桶(9),所述打胶桶(9)通过气管连接有气动三联体(10),所述打胶桶(9)设于输送线(3)的输入端。2.根据权利要求1所述的一种视觉跟随点胶系统设备,其特征在于:所述机架(1)对应输送线(3)的输入端设有对输送线(3)驱动的电机(11),所述电机(11)固定安装在机架(1)上。3.根据权利要求2所述的一种视觉跟随点胶系统设备,其特征在于:所述跟随移动模组机构(2)和电机(11)的输入端连接有控制组件(12),所述控制组件(12)固定安装在机架(1)上,所述控制组件(12)对应跟随移动模组机构(2)设有急停按键。4.根据权利要求1所述的一种视觉跟随点胶系统设备,其特征在于:所述相机(4)通过支撑架配合微调滑台(13)对应输送线(3)的上方设置,所述相机(4)上设有相机光源(14)2。5.根据权利要求2所述的一种视觉跟随点胶系统设备,其特征在于:所述打胶桶(9)采用内置有增压气缸、换向电磁阀、调压阀的打胶容器结构设置。
技术总结
本实用新型公开了一种视觉跟随点胶系统设备,包括机架以及安装在机架上的跟随移动模组机构,所述机架上设有输送线,所述跟随移动模组机构设于输送线的中间位置;所述机架对应跟随移动模组机构的点胶端设有相机,所述跟随移动模组机构的点胶端对应输送线通过点胶阀升降滑台气缸设有点胶阀,所述输送线对应相机下方和跟随移动模组机构的前端分别设有输送线传感器一和输送线传感器二;所述机架上对应点胶阀的输入端设有打胶桶,所述打胶桶通过气管连接有气动三联体,所述打胶桶设于输送线的输入端。该视觉跟随点胶系统设备,具备生产效率高、降低生产成本的优点。降低生产成本的优点。降低生产成本的优点。
技术研发人员:郭新辉
受保护的技术使用者:广州市赛辉机器人自动化有限公司
技术研发日:2021.03.03
技术公布日:2021/11/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1