一种用于综采工作面巡检机器人的自适应轨道的制作方法
1.本实用新型一种用于综采工作面巡检机器人的自适应轨道,属于煤矿安全生产巡检技术领域。
背景技术:
2.目前采煤工作面的巡检工作依靠人工进行,而工作面环境复杂,片帮严重、空间狭小、积水情况常见,灾害事故隐患严重,一方面,由于综采面环境危险、工况恶劣,巡检人员自身的安全无法保障;另一方面,由于检查人员容易受到个人经验和情绪、主观意识的影响,受到监测手段、数据记录、数据分析方面的制约等原因,导致检查不到位,不能得到有效的数据结果,得到的数据难以形成系统性,事故隐患经常出现漏检漏报,存在很大安全隐患。
技术实现要素:
3.本实用新型克服了现有技术存在的不足,提供了一种用于综采工作面巡检机器人的自适应轨道,解决了现有技术中人工巡检存在的安全隐患问题。
4.为了解决上述技术问题,本实用新型采用的技术方案为:一种用于综采工作面巡检机器人的自适应轨道,包括多个轨道本体、弹性连接件、支撑架和限位块,所述支撑架的一侧用于固定在刮板机上,所述支撑架的另一侧设置有两块上下平行的挡板,两块所述挡板的一端固定设置在支撑架上,两块所述挡板的另一端均设置有一个轨道本体,两个所述轨道本体上下平行设置,且两块所述挡板之间在位于轨道本体一侧的端部活动设置有弧形的单向挡条,两块所述挡板之间在位于支撑架一侧的端部活动设置有腰部内凹的回转体滚轮,所述回转体滚轮、两个挡板和单向挡条配合形成的通道用于限制钢丝绳的活动空间,多个所述轨道本体依次连接,且相邻的两个所述轨道本体之间通过弹性连接件连接在一起,所述弹性连接件用于相邻的两个轨道本体能在360
°
范围内调整,以适应巷道结构,上下平行的两个所述轨道本体之间设置有一个或一个以上的限位块,所述限位块用于限制钢丝绳位于轨道本体的内侧。
5.所述限位块包括第一限位支架和第一限位器,所述第一限位支架固定设置在位于下方的轨道本体上,所述第一限位器呈倒j型,所述第一限位器固定设置在第一限位支架上端,且所述第一限位器的上方与位于其上方的轨道本体之间留有用于巡检机器人本体通过的空间。
6.所述限位块包括第二限位支架和第二限位器,所述第二限位支架固定设置在位于下方的轨道本体上,所述第二限位器呈重心下移的偏心结构,所述第二限位器的下部活动铰接在第二限位支架上端,所述第二限位器的上端紧贴位于其上方的轨道本体设置,所述第二限位器用于巡检机器人本体在压倒其通过后能自动复位。
7.所述单向挡条的上部插接在位于上方挡板下侧的卡槽内,所述单向挡条的下部抵在上方挡板的上侧面上,所述单向挡条的圆心位于靠近回转体滚轮的一侧。
8.所述弹性连接件为弹簧结构。
9.本实用新型与现有技术相比具有的有益效果是:本实用新型用于开发工作面钢丝牵引巡检机器人替代巡检人员,观察采煤机开采姿态、液压支架与采煤机滚筒距离等情况,有效提高煤矿综采自动化水平,提升了监测控制系统的精准性,实现少人或无人作业。
附图说明
10.下面结合附图对本实用新型做进一步的说明。
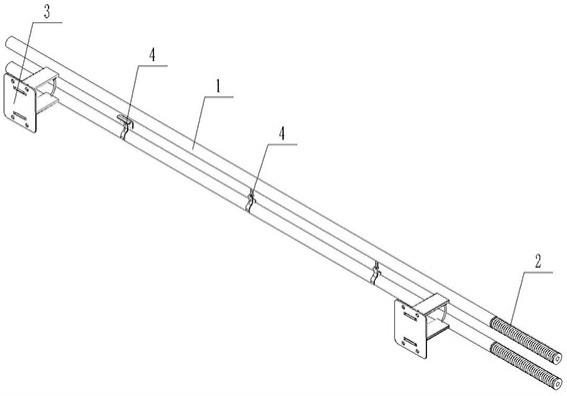
11.图1为本实用新型的结构示意图。
12.图2为本实用新型中支撑架的使用状态示意图。
13.图3为本实用新型中支撑架的使用状态侧视图。
14.图4为本实用新型中回转体滚轮、两个挡板和单向挡条的配合示意图。
15.图5为本实用新型中限位块的示意图一。
16.图6为本实用新型中限位块的示意图二。
17.图中:1为轨道本体、2为弹性连接件、3为支撑架、4为限位块、41为第一限位支架、42为第一限位器、43为第二限位支架、44为第二限位器、5为挡板、6为单向挡条、7为回转体滚轮、
具体实施方式
18.如图1~图6所示,本实用新型一种用于综采工作面巡检机器人的自适应轨道,包括多个轨道本体1、弹性连接件2、支撑架3和限位块4,所述支撑架3的一侧用于固定在刮板机上,所述支撑架3的另一侧设置有两块上下平行的挡板5,两块所述挡板5的一端固定设置在支撑架3上,两块所述挡板5的另一端均设置有一个轨道本体1,两个所述轨道本体1上下平行设置,且两块所述挡板5之间在位于轨道本体1一侧的端部活动设置有弧形的单向挡条6,两块所述挡板5之间在位于支撑架3一侧的端部活动设置有腰部内凹的回转体滚轮7,所述回转体滚轮7、两个挡板5和单向挡条6配合形成的通道用于限制钢丝绳的活动空间,多个所述轨道本体1依次连接,且相邻的两个所述轨道本体1之间通过弹性连接件2连接在一起,所述弹性连接件2用于相邻的两个轨道本体1能在360
°
范围内调整,以适应巷道结构,上下平行的两个所述轨道本体1之间设置有一个或一个以上的限位块4,所述限位块4用于限制钢丝绳位于轨道本体1的内侧。
19.所述限位块4包括第一限位支架41和第一限位器42,所述第一限位支架41固定设置在位于下方的轨道本体1上,所述第一限位器42呈倒j型,所述第一限位器42固定设置在第一限位支架41上端,且所述第一限位器42的上方与位于其上方的轨道本体1之间留有用于巡检机器人本体通过的空间。
20.所述限位块4包括第二限位支架43和第二限位器44,所述第二限位支架43固定设置在位于下方的轨道本体1上,所述第二限位器44呈重心下移的偏心结构,所述第二限位器44的下部活动铰接在第二限位支架43上端,所述第二限位器44的上端紧贴位于其上方的轨道本体1设置,所述第二限位器44用于巡检机器人本体在压倒其通过后能自动复位。
21.所述单向挡条6的上部插接在位于上方挡板5下侧的卡槽内,所述单向挡条6的下部抵在上方挡板5的上侧面上,所述单向挡条6的圆心位于靠近回转体滚轮7的一侧。
22.所述弹性连接件2为弹簧结构。
23.本实用新型中巡检机器人本体沿轨道本体移动,对综采工作面进行巡检,替代巡检人员观察采煤机开采姿态、液压支架与采煤机滚筒距离等情况,有效提高煤矿综采自动化水平,提升了监测控制系统的精准性,实现少人或无人作业。
24.上面结合附图对本实用新型的实施例作了详细说明,但是本实用新型并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。
技术特征:
1.一种用于综采工作面巡检机器人的自适应轨道,其特征在于,包括多个轨道本体(1)、弹性连接件(2)、支撑架(3)和限位块(4),所述支撑架(3)的一侧用于固定在刮板机上,所述支撑架(3)的另一侧设置有两块上下平行的挡板(5),两块所述挡板(5)的一端固定设置在支撑架(3)上,两块所述挡板(5)的另一端均设置有一个轨道本体(1),两个所述轨道本体(1)上下平行设置,且两块所述挡板(5)之间在位于轨道本体(1)一侧的端部活动设置有弧形的单向挡条(6),两块所述挡板(5)之间在位于支撑架(3)一侧的端部活动设置有腰部内凹的回转体滚轮(7),所述回转体滚轮(7)、两个挡板(5)和单向挡条(6)配合形成的通道用于限制钢丝绳的活动空间,多个所述轨道本体(1)依次连接,且相邻的两个所述轨道本体(1)之间通过弹性连接件(2)连接在一起,所述弹性连接件(2)用于相邻的两个轨道本体(1)能在360
°
范围内调整,以适应巷道结构,上下平行的两个所述轨道本体(1)之间设置有一个或一个以上的限位块(4),所述限位块(4)用于限制钢丝绳位于轨道本体(1)的内侧。2.根据权利要求1所述的一种用于综采工作面巡检机器人的自适应轨道,其特征在于,所述限位块(4)包括第一限位支架(41)和第一限位器(42),所述第一限位支架(41)固定设置在位于下方的轨道本体(1)上,所述第一限位器(42)呈倒j型,所述第一限位器(42)固定设置在第一限位支架(41)上端,且所述第一限位器(42)的上方与位于其上方的轨道本体(1)之间留有用于巡检机器人本体通过的空间。3.根据权利要求1所述的一种用于综采工作面巡检机器人的自适应轨道,其特征在于,所述限位块(4)包括第二限位支架(43)和第二限位器(44),所述第二限位支架(43)固定设置在位于下方的轨道本体(1)上,所述第二限位器(44)呈重心下移的偏心结构,所述第二限位器(44)的下部活动铰接在第二限位支架(43)上端,所述第二限位器(44)的上端紧贴位于其上方的轨道本体(1)设置,所述第二限位器(44)用于巡检机器人本体在压倒其通过后能自动复位。4.根据权利要求1所述的一种用于综采工作面巡检机器人的自适应轨道,其特征在于,所述单向挡条(6)的上部插接在位于上方挡板(5)下侧的卡槽内,所述单向挡条(6)的下部抵在上方挡板(5)的上侧面上,所述单向挡条(6)的圆心位于靠近回转体滚轮(7)的一侧。5.根据权利要求1所述的一种用于综采工作面巡检机器人的自适应轨道,其特征在于,所述弹性连接件(2)为弹簧结构。
技术总结
本实用新型公开一种用于综采工作面巡检机器人的自适应轨道,解决了现有技术中人工巡检存在的安全隐患问题;支撑架的一侧用于固定在刮板机上,两块挡板之间在位于轨道本体一侧的端部活动设置有弧形的单向挡条,两块挡板之间在位于支撑架一侧的端部活动设置有腰部内凹的回转体滚轮,回转体滚轮、两个挡板和单向挡条配合形成的通道用于限制钢丝绳的活动空间,多个轨道本体依次连接,且相邻的两个轨道本体之间通过弹性连接件连接在一起,弹性连接件用于相邻的两个轨道本体能在360
技术研发人员:翟德华 梁耀林 张爱民 李响 郭海 王进 刘盛元
受保护的技术使用者:山西中科智能控制技术研究院有限公司
技术研发日:2021.06.09
技术公布日:2021/12/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1