一种自动化上线检验系统的制作方法
1.本发明涉及电感制造设备领域,具体涉及一种自动化上线检验系统。
背景技术:
2.自动化生产线是指由自动化机器体系实现产品工艺过程的一种生产组织形式。它是在连续流水线的进一步发展的基础上形成的。其特点是:加工对象自动地由一台机床传送到另一台机床,并由机床自动地进行加工、装卸、检验等;工人的任务仅是调整、监督和管理自动线,不参加直接操作;所有的机器设备都按统一的节拍运转,生产过程是高度连续的。
3.电感(电感线圈)是用绝缘导线(例如漆包线、纱包线等)绕制而成的电磁感应元件,也是电子电路中常用的元器件之一。其生产工序包括植入—填粉—热压—脱模。在大批、大量生产电感产品时,通常需要采用自动化生产线来提高劳动生产率,稳定和提高产品质量,改善劳动条件,缩减生产占地面积,降低生产成本,缩短生产周期,保证生产均衡性,有显著的经济效益。
4.然而,现有技术中的电感生产的自动化生产线多为单机、单工位人工操作生产,在进行装夹工件、取下工件等操作时,还是需要人工手动完成,影响生产效率低,且人工操作容易产生误差,自动化程度较低。同时在电感生产过程中,需要人工检验电感产品的不良率,当存在不良产品时,需要重新开始,人工检验效率低,且电感产品不良率高。
技术实现要素:
5.本发明的目的在于,提供一种自动化上线检验系统。
6.本发明所解决的技术问题可以采用以下技术方案来实现:
7.本发明提供一种自动化上线检验系统,用于电感生产线,所述生产线上包括依次连通的多个工艺设备,还包括:
8.一传送机构,所述传送机构用于传输模具,所述模具包括多个模腔,多个所述工艺设备内的工件通过所述传送机构依次传输,所述工件放置于所述模腔中;
9.至少一个模具搬运机构,用于将所述传送机构上的所述模具移动至所述工艺设备的进料口,以及将所述工艺设备的出料口的所述模具移动至所述传送机构上;
10.多个检测装置,分别设置于相邻的两个所述工艺设备之间,用于检测前一所述工艺设备出料口的所述模具中每个所述工件是否合格;
11.一控制装置,分别连接所述传送机构、至少一个所述模具搬运机构和多个所述检测装置,用于控制所述传送机构对所述模具进行传输,以及用于接收每个所述检测装置的检测结果,于所述检测结果表示所述模具中存在所述工件不合格时发出报警,并控制所述模具搬运机构将对应的所述模具搬运至一模具回流线上。
12.优选地,所述工艺设备包括:
13.植入设备,用于将所述工件植入到所述模具的每个所述模腔中;
14.所述检测装置包括:
15.一第一检测机构,设置于所述植入设备的下游,用于检测所述模具中植入后的所述工件的不良情况。
16.优选地,所述第一检测机构包括一激光位移传感器,所述激光位移传感器设置于所述传送机构的上方并对准植入后的所述模具,用于连续检测所述模具的每个所述模腔中所述工件的不良情况;
17.每个所述工件的不良情况包括所述工件的放置位置是否正确,所述工件的放置数量是否正确。
18.优选地,所述工艺设备包括:
19.填粉设备,设置于所述植入设备的下游,用于对所述模具中植入的所述工件进行填粉;
20.所述检测装置包括:
21.一第二检测机构,设置于所述填粉设备的下游,用于检测所述模具的填粉后的每个所述工件是否合格。
22.优选地,所述第二检测机构包括:
23.一第一摄像模块,所述第一摄像模块设置于所述传送机构的上方并对准填粉后的所述模具,用于拍摄整个所述模具的模具图像;
24.一人机交互界面,连接所述第一摄像模块,用于显示所述模具图像,以及供用户根据所述模具图像判断所述模具中的填粉后的每个所述工件是否合格。
25.优选地,所述工艺设备包括:
26.热压设备,设置于所述填粉设备的下游,用于对填粉后的所述工件进行热压成型;
27.所述检测装置包括:
28.一第三检测机构,设置于所述热压设备的下游,用于检测是否有所述工件黏附在所述热压设备的上模具冲头上。
29.优选地,所述第三检测机构包括:
30.一光纤发射端,设置于所述上模具冲头的一侧;
31.一光纤接收端,设置于所述上模具冲头的另一侧,且所述光纤发射端和所述光纤接收端的连接轴线与复位后的上模具冲头的下端相距一预设距离。
32.优选地,所述工艺设备包括:
33.冷凝脱模设备,设置于所述热压设备的下游,用于对热压成型的所述工件冷凝,并将冷凝后的所述工件从所述模具中脱出;
34.所述检测装置包括:
35.一第四检测机构,设置于所述冷凝脱模设备的下游,用于检测脱模后的所述模具中是否有未脱落的所述工件。
36.优选地,所述模具包括一模具主体和一模芯,所述模芯可滑动的设置于所述模具主体中;
37.所述第四检测机构包括:
38.一光源,设置于所述模芯的下方;
39.一第二摄像模块,所述第二摄像模块设置于所述模芯的上方并对准脱模后的所述
模芯,用于当执行完冷凝脱模操作后,所述第二摄像模块对抽取出的所述模芯进行拍摄,得到所述模芯背对所述光源的模芯图像。
40.优选地,所述模具搬运机构包括一第一机器人,所述第一机器人包括:
41.一第一机器主体;
42.一第二机器主体,所述第二机器主体设置于所述第一机器主体上,并可围绕所述第一机器主体做旋转和/或升降运动;
43.一第三机器主体,所述第三机器主体设置于所述第二机器主体上,并可围绕所述第二机器主体做旋转和/或升降运动;
44.一夹持部,设置于所述第三机器主体上,所述第三机器主体可带动所述夹持部移动。
45.本发明技术方案的有益效果在于:
46.本发明提供一种自动化上线检验系统,可执行模具从植入—填粉—热压—脱模工序的运转,通过模具搬运机构代替人工,为每一台设备的进料口提供工件,并将每一台设备的出料口的工件取出,通过传送机构来传输模具,保证各环节有序的进行,提高电感的生产效率,实现生产线的自动化;同时在相邻的两台设备之间分别增加一个检测装置,通过检测装置能够检测出执行每一工序后的工件是否符合要求,即便及时通过模具搬运机构将不合格的工件取出,提高电感的生产良率,节省生产成本。
附图说明
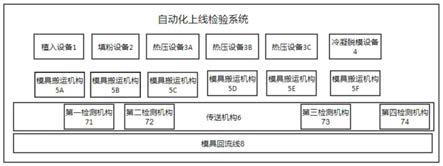
47.图1是本发明中一种自动化上线检验系统的结构示意图;
48.图2是本发明中,模具搬运机构具体实施例的结构示意图,其中,第一检测机构安装在植入设备和填粉设备之间的模具搬运机构具体实施例图;
49.图3是本发明中,第一检测机构具体实施例的原理示意图;
50.图4是本发明中,模具搬运机构具体实施例的结构示意图,其中,第二检测机构安装在热压设备和冷凝脱模设备之间的模具搬运机构具体实施例图;
51.图5是本发明中,第二检测机构具体实施例的原理示意图;
52.图6是本发明中,第三检测机构具体实施例的原理示意图;
53.图7是本发明中,第四检测机构具体实施例的原理示意图。
具体实施方式
54.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
55.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
56.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
57.本发明提供一种自动化上线检验系统,属于电感制造设备领域,参见图 1
‑
7,用于电感生产线,生产线上包括依次连通的多个工艺设备,还包括:
58.一传送机构6,传送机构6用于传输模具,模具包括多个模腔,多个工艺设备内的工件通过传送机构6依次传输,工件放置于模腔中;
59.至少一个模具搬运机构(5a、5b、5c、5d、5e、5f),用于将传送机构 6上的模具移动至工艺设备的进料口,以及将工艺设备的出料口的模具移动至传送机构5上;
60.多个检测装置,分别设置于相邻的两个工艺设备之间,用于检测前一工艺设备出料口的模具中每个工件是否合格;
61.一控制装置(图中未示出),分别连接传送机构6、至少一个模具搬运机构(5a、5b、5c、5d、5e、5f)和多个检测装置,用于控制传送机构6对模具进行传输,以及用于接收每个检测装置的检测结果,于检测结果表示模具中存在工件不合格时发出报警,并控制模具搬运机构6将对应的模具搬运至一模具回流线8上。
62.具体的,在本实施例中,还包括:传送机构6和至少一个模具搬运机构 (5a、5b、5c、5d、5e、5f),传送机构6可以是传送带,用于传输模具 61,模具61包括多个模腔,每个模腔中可放置一个工件,模具61中的工件通过传送机构6依次传输经过多个工艺设备;通过模具搬运机构(5a、5b、 5c、5d、5e、5f)将传送机构6上对应每台工艺设备位置处的模具61运送至对应工艺设备的进料口,以及将每台工艺设备的出料口的模具61再运送至传送机构6上对应的位置处。优选的,模具搬运机构(5a、5b、5c、5d、 5e、5f)可以设置为一个,通过特定的移动机构在每台工艺设备之间移动;或者模具搬运机构(5a、5b、5c、5d、5e、5f)也可以设置为多个,多个模具搬运机构(5a、5b、5c、5d、5e、5f)设置在相邻两工艺设备之间,或对应每台工艺设备均设置一个模具搬运机构(5a、5b、5c、5d、5e、5f)。通过模具搬运机构(5a、5b、5c、5d、5e、5f)代替人工,为每一台工艺设备的进料口提供工件,并将每一台工艺设备的出料口的工件取出,通过传送机构6来传输模具61,保证各环节有序的进行,提高电感的生产效率,实现生产线的自动化;
63.进一步的,还包括:多个检测装置,分别设置于相邻的两台工艺设备之间,用于检测电感生产工序中经前一台工艺设备操作后的模具61中的每个模腔中工件是否合格,如果合格,则继续下一工序,如果不合格,则利用模具搬运机构(5a、5b、5c、5d、5e、5f)将不合格的产品运送至模具回流线 8上,由人工集中处理;
64.采用自动生产线不仅可以把人从繁重的体力劳动、部分脑力劳动以及恶劣、危险的工作环境中解放出来,而且能极大地提高劳动生产率。
65.进一步的,电感生产的自动化生产线上包括植入设备1、填粉设备2、至少一个热压设备(3a、3b、3c)、冷凝脱模设备4,以完成电感生产过程中从植入—填粉—热压—脱模工序的运转,其中,热压设备(3a、3b、3c) 优选为三个,通过三个热压设备(3a、3b、3c),可以将上一次热压过程中,未压合完成的产品重新进行热压,可将工件经三次热压过程,使得制备得到的工件性能更佳,更为优选的,在该自动化生产线上可以任意增加或减少电感生产工序中其他机床设备的数量,例如填粉设备2设置为两个等,以更进一步优化电感生产工序,提升产品性能。
66.作为优选的实施方式,工艺设备包括:
67.植入设备1,用于将工件植入到模具的每个模腔中;
68.填粉设备2,设置于植入设备1的下游,用于对模具中植入的工件进行填粉;
69.检测装置包括:
70.一第一检测机构71,设置于植入设备1和填粉设备2之间,用于检测模具中植入后的工件的不良情况。
71.具体的,在本实施例中,在植入设备1到填粉设备2之间增加检测功能,第一检测机构71主要用于检验植入后的模具61的各个模腔中工件是否植入不良,例如包括但不限于多放、横放、斜放、悬空放、放反、漏放等情况。
72.作为优选的实施方式,如图3所示,第一检测机构71包括一激光位移传感器711,激光位移传感器711设置于传送机构6的上方并对准植入后的模具61,用于连续检测模具61的每个模腔中工件的不良情况;
73.每个工件的不良情况包括工件的放置位置是否正确,工件的放置数量是否正确。
74.具体的,在本实施例中,采用激光位移传感器711对植入后的模具61 进行检测,由于模具61可以包括一个模腔,也可以包括2、4、8、16、32、 64
…
等多个模腔,因此,激光位移传感器711可以连续检测,对每一个模腔中的工件的植入情况进行检测,当发生多放、横放、斜放、悬空放、放反、漏放中的任一情况时,设备发出报警,模具搬运机构(5a、5b、5c、5d、5e、 5f)将模具61搬到不良模具61的模具回流线8上,由人工处理。
75.作为优选的实施方式,工艺设备包括:
76.填粉设备,用于对模具中的工件进行填粉;
77.热压设备,设置于填粉设备的下游,用于对填粉后的工件进行热压成型;
78.检测装置包括:
79.一第二检测机构72,设置于填粉设备2和热压设备(3a、3b、3c)之间,用于检测模具61的填粉后的每个工件是否合格。
80.具体的,在本实施例中,在填粉设备2到热压设备(3a、3b、3c)之间增加检测功能,第二检测机构72主要用于检验是否填粉不良,例如包括但不限于填粉量过多或填粉量过少。
81.作为优选的实施方式,如图5所示,第二检测机构72包括:
82.一第一摄像模块721,第一摄像模块721设置于传送机构6的上方并对准填粉后的模具61,用于拍摄整个模具61的模具61图像;
83.一人机交互界面723,连接第一摄像模块721,用于显示模具61图像,以及供用户根据模具61图像判断填粉后的模具61中的每个工件是否合格。
84.具体的,在本实施例中,采用第一摄像模块721对填粉后的模具61进行检测,第一摄像模块721为相机,相机安装在模具搬运机构(5a、5b、5c、 5d、5e、5f)上,模具搬运机构(5a、5b、5c、5d、5e、5f)上还对应设置有一第一光源722,通过相机抓拍整个模具61的模具61图像;人机交互界面723为一显示器,显示器安装在整线机架上,在人机交互界面723上显示相机实时抓拍整个模具61画面,工作人员根据显示的模具61图像来判断填粉后的工件是否合格,如果不合格,通过模具搬运机构(5a、5b、5c、5d、 5e、5f)将模具61搬到不良模具61的模具回流线8上,并报警由人工处理。
85.作为优选的实施方式,工艺设备包括:
86.热压设备,用于对模具中的工件进行热压成型;
87.冷凝脱模设备,设置于热压设备的下游,用于对热压成型的工件冷凝,并将冷凝后的工件从模具中脱出;
88.检测装置包括:
89.一第三检测机构73,设置于热压设备(3a、3b、3c)和冷凝脱模设备4 之间,用于检测是否有工件黏附在热压设备(3a、3b、3c)的上模具冲头上。
90.具体的,在本实施例中,在热压设备(3a、3b、3c)到脱模设备之间增加检测功能,第三检测机构73主要用于检验压合的工件是否还残留在上模具61冲头上。
91.作为优选的实施方式,如图6所示,第三检测机构73包括:
92.一光纤发射端731,设置于上模具61冲头01的一侧;
93.一光纤接收端732,设置于上模具61冲头01的另一侧,且光纤发射端和光纤接收端的连接线与复位后的上模具61冲头01的下端相距一预设距离。
94.具体的,在本实施例中,光纤发射端731为对射光纤,光纤接收端732 可以为对应的对射光电传感器,当热压工序完成后,上模具61冲头01复位,若有磁芯0黏附在上模具61冲头01上,由于磁芯0遮挡,光纤接收端732 接收到的光亮数值,相对无磁芯0黏附时会明显变小,以此判断是否有磁芯 0黏附在上模具61冲头01上,进一步判断在热压完成后的模具61中是否缺少磁芯0。
95.作为优选的实施方式,工艺设备包括:
96.冷凝脱模设备,用于对模具中的工件进行冷凝,并将冷凝后的工件从模具中脱出;
97.检测装置包括:
98.一第四检测机构74,用于检测脱模后的模具61中是否有未脱落的工件。
99.具体的,在本实施例中,在冷凝脱模设备4之后增加检测功能,第四检测机构74主要用于检验工件是否完全从模具61中脱离出来。
100.进一步的,本实施例中所涉及到的四步检验法无法通过人工检验实现,而通过该四步检验法能够大大的提高生产良率,模具61不易被损坏,节省生产成本,进一步提高生产效率。
101.作为优选的实施方式,如图7所示,模具61包括一模具主体和一模芯611,模芯611可滑动的设置于模具61主体中;
102.第四检测机构74包括:
103.一光源742,设置于模芯611的下方;
104.一第二摄像模块741,第二摄像模块741设置于模芯611的上方并对准脱模后的模芯611,用于当执行完冷凝脱模操作后,第二摄像模块741对抽取出的模芯611进行拍摄,得到模芯611背对光源742的模芯611图像。
105.具体的,在本实施例中,第四检测机构74包括光源742和第二摄像模块741,第二摄像模块741为相机,完成冷却脱模工序后,将模具61的模芯 611从模具61主体中抽出,光源742由模芯611的下方向上打光,通过相机的ccd拍照识别模芯611中是否有未脱落的磁芯0。
106.作为优选的实施方式,如图2或图4所示,模具搬运机构(5a、5b、5c、 5d、5e、5f)包括一第一机器人,第一机器人包括:
107.一第一机器主体51;
108.一第二机器主体52,第二机器主体52设置于第一机器主体51上,并可围绕第一机器主体51做旋转和/或升降运动;
109.一第三机器主体53,第三机器主体53设置于第二机器主体52上,并可围绕第二机
器主体52做旋转和/或升降运动;
110.一夹持部54,设置于第三机器主体53上,第三机器主体53可带动夹持部54移动。
111.具体的,在本实施例中,模具搬运机构(5a、5b、5c、5d、5e、5f)可以是第一机器人,第一机器人包括:第一机器主体51、第二机器主体52、第三机器主体53和夹持部54,优选的,模具搬运机构(5a、5b、5c、5d、 5e、5f)通过夹持部54可具备三个功能,功能1:将模具61夹取并运送至一固定位置;功能2:将模具61从取放处推入至定位处;功能3:将模具61 从定位处拉入至取放处。
112.进一步的,在本实施例中,如图2所示,在植入设备1到填粉设备2之间采用第一机器人,且第一机器人上可安装第一检测机构71,第一机器人可用于带动第一检测机构71移动至检测工站62处的上方,检测工站62设置于相邻两台设备之间。如图4所示,在填粉设备2到热压设备(3a、3b、3c) 之间增加第二机器人,第二机器人的具体结构和第一机器人一致,主要是用于将模具61放入到填粉设备2里,然后再取出来,但第二机器人上安装的是第二检测机构72,带动第二检测机构72移动至填粉设备2到热压设备(3a、 3b、3c)之间的检测工站62处的上方,对填粉后的模具61进行检测;其余设备之间可以均采用第一机器人,也可以采用参照现有技术中能够搬运模具 61的机器人的具体结构。
113.作为优选的实施方式,还包括:
114.一报警装置,分别连接多个检测装置,用于当检测结果表示存在不合格的工件时,发出报警。
115.作为优选的实施方式,热压设备(3a、3b、3c)为三个。
116.于上述较佳的实施例中,模具回流线8为至少一条,本实施例中模具回流线8包括第一模具回流线和第二模具回流线,用于供模具搬运机构(5a、 5b、5c、5d、5e、5f)将不合格的工件取出并移动至模具回流线8上。
117.上述技术方案具有如下优点或有益效果:
118.本发明提供一种自动化上线检验系统,可执行模具从植入—填粉—热压—脱模工序的运转,通过模具搬运机构代替人工,为每一台设备的进料口提供工件,并将每一台设备的出料口的工件取出,通过传送机构来传输模具,保证各环节有序的进行,提高电感的生产效率,实现生产线的自动化;同时在相邻的两台设备之间分别增加一个检测装置,通过检测装置能够检测出执行每一工序后的工件是否符合要求,即便及时通过模具搬运机构将不合格的工件取出,提高电感的生产良率,节省生产成本。
119.以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1