一种地铁转向架巡检机器人的制作方法
1.本发明属于机器人领域,尤其涉及一种地铁转向架巡检机器人。
背景技术:
2.转向架是地铁车辆的行走机构,在地铁的安全运行方面有重要作用。地铁转向架巡检是指列车进维修库后对转向架进行全面检查,包括螺栓连接是否松动、轮对部件是否磨损、保持架有无裂纹等,进而降低列车运行中的安全隐患,保证列车正常运行。
3.目前,我国地铁车辆的转向架日常巡检作业全部采用人工巡检的方法。由于所有检修都安排在午夜列车入库之后进行,检修项点多,人员劳动强度大,造成作业人员易疲劳,导致误检、漏检的问题,且检修效率低,经验依赖性强。
4.而现有的相似专利《一种新型变电站移动巡检机器人》(发布号:cn112171650a)和专利《一种巡检机器人》(发布号:cn113650038a)。具有以下缺点:一是缺少保持平台运动稳定性的维稳设置;二是机械臂缺乏自主保护机构。
5.因此,有必要提供一种用于地铁转向架检测的巡检机器人解决上述问题。
技术实现要素:
6.针对现有人工巡检转向架存在的问题和提高巡检效率的需求,以及解决现有技术中的不足,本发明提供一种地铁转向架巡检机器人。
7.本发明的一种地铁转向架巡检机器人,包括运动平台、升降机构、机械臂和图像采集模块。
8.运动平台包括车体、导航控制装置和悬挂机构。
9.导航控制装置包括导航传感器和导航控制器;导航传感器包括一号三维激光雷达和二号三维激光雷达,分别安装于车体的前后端;导航控制器集成在车体上,与导航传感器连接,用于控制车体自主导航。
10.悬挂机构包括运动导轨、高精度滑块、弹簧和运动模组;运动导轨与车体连接,弹簧和高精度滑块安装在运动导轨上面,且高精度滑块在弹簧的上面,运动模组与高精度滑块连接。
11.升降机构包括支撑板、丝杆、同步带和伺服驱动机构;丝杆与车体连接,支撑板安装在丝杆顶部;伺服驱动机构安装在支撑板下侧,伺服驱动机构通过同步带带动丝杆旋转,实现支撑板的升降。
12.机械臂的底座固定在支撑板上,机械臂带有力反馈功能,在机械臂末端安装有图像采集模块。
13.进一步的,图像采集模块采用带有自动补光功能的三维彩色相机。
14.本发明的有益技术效果为:
15.1、本发明通过升降平台调整机械臂的高度,并利用机械臂的姿态调整特性,可以驱动图像采集模块全方位、多角度的进行转向架不同部件的图像采集,特别针对位于转向
架的部分复杂狭窄空间中的巡检部件,机械臂末端能够灵活的调整姿态接近巡检目标进行图像采集。
16.2、本发明机械臂带有力反馈功能,可在转向架狭窄复杂的环境中,避免与转向架部件发生硬碰撞,实现对转向架部件和机械臂、图像采集模块的保护。
17.3、本发明通过导航控制装置的多个三维激光雷达,可以实现机器人在检修地沟中准确的导航和转向架下准确的定位。
18.4、本发明通过悬挂机构与运动模组连接,保证机器人在不平整地面上足够的贴合力,提高了驱动能力和运动平稳性。
附图说明
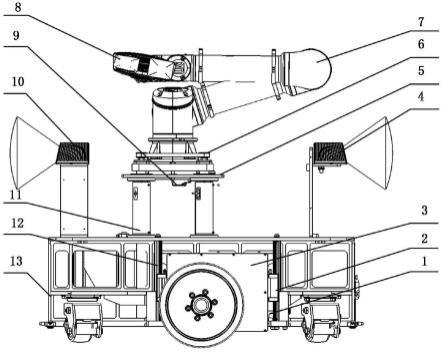
19.图1为本发明地铁转向架巡检机器人结构示意图。
20.图中:1-弹簧,2-高精度滑块,3-运动模组,4-一号三维激光雷达,5-支撑板,6-同步带,7-机械臂,8-图像采集模块,9-伺服驱动机构,10-二号三维激光雷达,11-丝杆,12-运动导轨,13-车体。
具体实施方式
21.下面结合附图和具体实施方法对本发明做进一步详细说明。
22.本发明的一种地铁转向架巡检机器人如图1所示,包括运动平台、升降机构、机械臂7和图像采集模块8。
23.运动平台包括车体13、导航控制装置和悬挂机构。
24.导航控制装置包括导航传感器和导航控制器;导航传感器包括一号三维激光雷达4和二号三维激光雷达10,分别安装于车体13的前后端;导航控制器集成在车体13上,与导航传感器连接,用于控制车体自主导航。
25.悬挂机构包括运动导轨12、高精度滑块2、弹簧1和运动模组3;运动导轨12与车体13连接,弹簧1和高精度滑块2安装在运动导轨12上面,且高精度滑块2在弹簧1的上面,运动模组3与高精度滑块2连接。悬挂机构保证了机器人在不平整地面上巡检时,始终保持与地面足够的贴合力,提高了驱动能力和运动平稳性。
26.升降机构包括支撑板5、丝杆11、同步带6和伺服驱动机构9;丝杆11与车体13连接,支撑板5安装在丝杆11顶部;伺服驱动机构9安装在支撑板5下侧,伺服驱动机构9通过同步带6带动丝杆11旋转,实现支撑板5的升降。
27.机械臂7的底座固定在支撑板5上,机械臂7带有力反馈功能,悬挂机构保证了机器人在不平整地面上巡检时,始终保持与地面足够的贴合力,提高了驱动能力和运动平稳性。
28.在机械臂7末端安装有图像采集模块8,图像采集模块8采用带有自动补光功能的三维彩色相机。
29.本发明导航控制器根据导航传感器采集的数据控制车体13行走。图像采集模块8通过三维相机采集实时图像画面,通过升降平台带动机械臂升降,通过机械臂位姿调整带动三维相机实现全方位多角度采集数据,巡检效果好。
技术特征:
1.一种地铁转向架巡检机器人,其特征在于,包括运动平台、升降机构、机械臂(7)和图像采集模块(8);所述运动平台包括车体(13)、导航控制装置和悬挂机构;所述导航控制装置包括导航传感器和导航控制器;导航传感器包括一号三维激光雷达(4)和二号三维激光雷达(10),分别安装于车体(13)的前后端;导航控制器集成在车体(13)上,与导航传感器连接,用于控制车体自主导航;所述悬挂机构包括运动导轨(12)、高精度滑块(2)、弹簧(1)和运动模组(3);运动导轨(12)与车体(13)连接,弹簧(1)和高精度滑块(2)安装在运动导轨(12)上面,且高精度滑块(2)在弹簧(1)的上面,运动模组(3)与高精度滑块(2)连接;所述升降机构包括支撑板(5)、丝杆(11)、同步带(6)和伺服驱动机构(9);丝杆(11)与车体(13)连接,支撑板(5)安装在丝杆(11)顶部;伺服驱动机构(9)安装在支撑板(5)下侧,伺服驱动机构(9)通过同步带(6)带动丝杆(11)旋转,实现支撑板(5)的升降;所述机械臂(7)的底座固定在支撑板(5)上,机械臂(7)带有力反馈功能,在机械臂(7)末端安装有图像采集模块(8)。2.根据权利要求1所述的一种地铁转向架巡检机器人,其特征在于,所述图像采集模块(8)采用带有自动补光功能的三维彩色相机。
技术总结
本发明公开了一种地铁转向架巡检机器人,包括运动平台、升降机构、机械臂和图像采集模块;运动平台包括车体、导航控制装置和悬挂机构,导航控制装置包括导航传感器和导航控制器,用于控制车体自主导航;悬挂机构包括运动导轨、高精度滑块、弹簧和运动模组,用于保持车体驱动能力和运动平稳性;升降机构包括支撑板、丝杆、同步带和伺服驱动机构,用于控制支撑板的升降;机械臂的底座固定在支撑板上,机械臂带有力反馈功能,在机械臂末端安装有图像采集模块。本发明适应转向架狭窄复杂的环境,运动平稳、驱动能力强,可以全方位、多角度采集转向架不同部件的图像,提高了地铁转向架的巡检效率。效率。效率。
技术研发人员:陈德旺 李沈航 田发存 周辉 陶天平 曾科文 孙永奎 马磊 邓雪 苏宇鑫 严春宏 林逸
受保护的技术使用者:成都运达科技股份有限公司
技术研发日:2022.03.29
技术公布日:2022/8/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1