加油站智能液位控制系统的制作方法
1.本实用新型涉及电气自动化技术领域,特别是涉及加油站智能液位控制系统。
背景技术:
2.近年来随着加油站销售量的不断增加以及石油价格的普遍高涨,油品的精细化管理也随之受到越来越多油站业主的重视,油站业主可以采用人工测量的方法,但需要大量的人力物力,成本较高,且效率较低,随着信息网络技术和自动化技术普遍提高,目前主要采用液位传感器实时采集加油的液位,输出到控制器(单片机),液位到达时,输出控制信号到阀门驱动器,使阀门动作停止输送,虽然实现了自动控制,但响应慢、控制不够精确。
技术实现要素:
3.针对上述情况,为克服现有技术之缺陷,本实用新型之目的在于提供加油站智能液位控制系统,有效的解决了现有技术响应慢、控制不够精确的问题。
4.其解决的技术方案是,包括液流检测传感器、液位检测传感器、阀门驱动器、信号处理电路,其特征在于,所述液流检测传感器检测的液流信号经滤波稳压后进入模拟乘法器,模拟乘法器还接入经充电电路转换后的响应时间,模拟乘法器乘积运算得出液流量信号,之后进入减法器与目标液位信号进行减法运算,得出修正后目标液位信号,修正后目标液位信号进入比较器ar1与液位检测传感器检测的液位信号进行比较,输出控制信号到阀门驱动器,使阀门动作停止输送。
5.本实用新型结构简单、响应快、自动控制,通过模拟乘法器对液流检测传感器检测的液流信号、经充电电路转换后的响应时间,乘积运算得出液流量信号,之后进入减法器与目标液位信号进行减法运算,得出修正后目标液位信号,修正后目标液位信号进入比较器ar1与液位检测传感器检测的液位信号进行比较,输出控制信号到阀门驱动器,使到达目标液位信号时停止输送,提高了控制信号的精度。
附图说明
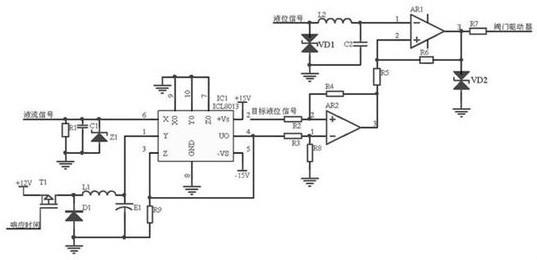
6.图1为本实用新型的电路原理图。
具体实施方式
7.有关本实用新型的前述及其他技术内容、特点与功效,在以下配合参考附图1对实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的结构内容,均是以说明书附图为参考。
8.下面将参照附图描述本实用新型的各示例性的实施例。
9.加油站智能液位控制系统,包括液流检测传感器、液位检测传感器、阀门驱动器、信号处理电路,所述液流检测传感器检测的液流信号经滤波稳压后进入模拟乘法器ic1的引脚6,模拟乘法器ic1的引脚1还接入经充电电路转换后的响应时间,模拟乘法器ic1乘积
运算得出液流量信号,之后进入运算放大器ar2、电阻r2
‑
电阻r4、电阻r8组成的减法器与目标液位信号进行减法运算,得出修正后目标液位信号,修正后目标液位信号进入比较器ar1与液位检测传感器检测的液位信号进行比较,液位到达时,输出控制信号到阀门驱动器,使阀门动作停止输送,使到达目标液位信号时停止输送,提高了控制信号的精度。
10.在上述方案的基础上,所述信号处理电路液流检测传感器检测的液流信号(可采用ldt超声波流量传感器进行检测)经电阻r1和电容c1滤波、稳压管z1稳压后进入模拟乘法器ic1的引脚6,模拟乘法器ic1的引脚1还接入经充电电路转换后的响应时间,具体的响应时间内的高电平(可由振荡器产生,此为现有技术,在此不再详述)加到mos管t1的栅极,+12v经导通的mos管t1的源极、漏极向电解电容e1进行充电,响应时间越长,充电电压越高,模拟乘法器ic1乘积运算得出液流量信号,也即响应时间的液流量信号的总量,之后进入运算放大器ar2、电阻r2
‑
电阻r4、电阻r8组成的减法器与目标液位信号进行减法运算,得出修正后目标液位信号,修正后目标液位信号进入比较器ar1的同相输入端,与液位检测传感器检测的液位信号进行比较,具体可为qmega液位检测传感器进行检测,经瞬态抑制二极管vd1瞬态抑制、电感l2和电容c2滤波后进入比较器ar1的反相输入端,液位到达时,输出控制信号到阀门驱动器,使阀门动作停止输送,使到达目标液位信号时停止输送,提高了控制信号的精度,包括模拟乘法器ic1,模拟乘法器ic1的引脚6、电阻r1的一端、电容c1的一端、稳压管z1的负极均连接液流检测传感器检测的液流信号,电阻r1的另一端、电容c1的另一端、稳压管z1的正极连接地,模拟乘法器ic1的引脚1分别连接电解电容e1的正极、电感l1的右端,电感l1的左端分别连接二极管d1的负极、mos管t1的漏极,mos管t1的源极连接电源+12v,mos管t1的栅极连接响应时间对应的高电平,电解电容e1的负极、二极管d1的正极连接地,模拟乘法器ic1的引脚3和引脚4分别连接接地电阻r9的一端、电阻r3的一端,模拟乘法器ic1的引脚7、引脚8、引脚9、引脚10均连接地,模拟乘法器ic1的引脚2连接电源+15v,模拟乘法器ic1的引脚5连接电源
‑
15v,电阻r3的另一端分别连接运算放大器ar2的反相输入端、接地电阻r8的一端,运算放大器ar2的同相输入端分别连接电阻r2的一端、电阻r4的一端,电阻r2的另一端连接目标液位信号,运算放大器ar2的输出端分别连接电阻r4的另一端、电阻r5的一端,电阻r5的另一端分别连接运算放大器ar1的同相输入端、电阻r6的一端,运算放大器ar1的反相输入端分别连接电感l2的右端、接地电容c2的一端,电感l2的左端和瞬态抑制二极管vd1的上端连接液位检测传感器检测的液位信号,瞬态抑制二极管vd1的下端连接地,运算放大器ar1的输出端分别连接电阻r6的另一端、电阻r7的一端、瞬态抑制二极管vd2的上端,瞬态抑制二极管vd2的下端连接地,电阻r7的另一端连接到阀门驱动器。
11.本实用新型具体使用时,检测传感器检测的液流信号经电阻r1和电容c1滤波、稳压管z1稳压后进入模拟乘法器ic1的引脚6,模拟乘法器ic1的引脚1还接入经充电电路转换后的响应时间,具体的响应时间内的高电平加到mos管t1的栅极,+12v经导通的mos管t1的源极、漏极向电解电容e1进行充电,响应时间越长,充电电压越高,模拟乘法器ic1乘积运算得出液流量信号,也即响应时间的液流量信号的总量,之后进入运算放大器ar2、电阻r2
‑
电阻r4、电阻r8组成的减法器与目标液位信号进行减法运算,得出修正后目标液位信号,修正后目标液位信号进入比较器ar1的同相输入端,与液位检测传感器检测的液位信号进行比较,具体可为qmega液位检测传感器进行检测,经瞬态抑制二极管vd1瞬态抑制、电感l2和电容c2滤波后进入比较器ar1的反相输入端,液位到达时,输出控制信号到阀门驱动器,使阀
门动作停止输送,使到达目标液位信号时停止输送,提高了控制信号的精度。
技术特征:
1.加油站智能液位控制系统,包括液流检测传感器、液位检测传感器、阀门驱动器、信号处理电路,其特征在于,所述液流检测传感器检测的液流信号经滤波稳压后进入模拟乘法器,模拟乘法器还接入经充电电路转换后的响应时间,模拟乘法器乘积运算得出液流量信号,之后进入减法器与目标液位信号进行减法运算,得出修正后目标液位信号,修正后目标液位信号进入比较器ar1与液位检测传感器检测的液位信号进行比较,输出控制信号到阀门驱动器,使阀门动作停止输送。2.根据权利要求1所述的加油站智能液位控制系统,其特征在于,所述信号处理电路包括模拟乘法器ic1,模拟乘法器ic1的引脚6、电阻r1的一端、电容c1的一端、稳压管z1的负极均连接液流检测传感器检测的液流信号,电阻r1的另一端、电容c1的另一端、稳压管z1的正极连接地,模拟乘法器ic1的引脚1分别连接电解电容e1的正极、电感l1的右端,电感l1的左端分别连接二极管d1的负极、mos管t1的漏极,mos管t1的源极连接电源+12v,mos管t1的栅极连接响应时间对应的高电平,电解电容e1的负极、二极管d1的正极连接地,模拟乘法器ic1的引脚3和引脚4分别连接接地电阻r9的一端、电阻r3的一端,模拟乘法器ic1的引脚7、引脚8、引脚9、引脚10均连接地,模拟乘法器ic1的引脚2连接电源+15v,模拟乘法器ic1的引脚5连接电源
‑
15v,电阻r3的另一端分别连接运算放大器ar2的反相输入端、接地电阻r8的一端,运算放大器ar2的同相输入端分别连接电阻r2的一端、电阻r4的一端,电阻r2的另一端连接目标液位信号,运算放大器ar2的输出端分别连接电阻r4的另一端、电阻r5的一端,电阻r5的另一端分别连接运算放大器ar1的同相输入端、电阻r6的一端,运算放大器ar1的反相输入端分别连接电感l2的右端、接地电容c2的一端,电感l2的左端和瞬态抑制二极管vd1的上端连接液位检测传感器检测的液位信号,瞬态抑制二极管vd1的下端连接地,运算放大器ar1的输出端分别连接电阻r6的另一端、电阻r7的一端、瞬态抑制二极管vd2的上端,瞬态抑制二极管vd2的下端连接地,电阻r7的另一端连接到阀门驱动器。
技术总结
本实用新型加油站智能液位控制系统,包括液流检测传感器、液位检测传感器、阀门驱动器、信号处理电路,所述液流检测传感器检测的液流信号经滤波稳压后进入模拟乘法器,模拟乘法器还接入经充电电路转换后的响应时间,模拟乘法器乘积运算得出液流量信号,之后进入减法器与目标液位信号进行减法运算,得出修正后目标液位信号,修正后目标液位信号进入比较器AR1与液位检测传感器检测的液位信号进行比较,输出控制信号到阀门驱动器,使阀门动作停止输送。有效的解决了现有技术响应慢、控制不够精确的问题。问题。问题。
技术研发人员:郑雪雨 齐永华 张可 娄延书
受保护的技术使用者:河南中能智控科技有限公司
技术研发日:2020.12.29
技术公布日:2021/9/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1