带有位置信息的X光数据二维标定处理方法与流程
带有位置信息的x光数据二维标定处理方法
技术领域:
1.本发明涉及数据处理技术领域,具体的说是一种能够有效提高数据精度,进而降低微创手术风险、提高手术效率和成功率的带有位置信息的x光数据二维标定处理方法。
背景技术:
2.在传统的外科手术中,往往是使用移动式的c形臂x光机作为诊断设备,通过调整c形臂的姿态来获取含有手术工具与患者解剖结构之间的位置关系的透视图像,根据当前手术工具与解剖结构的相对位置关系调整手术工具的姿态,使之接近于手术目标。但由于手术工具的调整无法实时显示,医生往往需要不断地重复上述调整过程,直至手术工具达到目标位置。整个手术步骤既繁琐又耗时,而且整个过程中医生均会受到x光线的放射性所带来的伤害。因此亟需一种能够在二维的透视图像中实时显示位置信息的数据处理方法及装置。
技术实现要素:
3.本发明针对现有技术中存在的缺点和不足,提出了一种能够有效提高数据精度,进而降低微创手术风险、提高手术效率和成功率的带有位置信息的x光数据二维标定处理方法。
4.本发明可以通过以下措施达到:
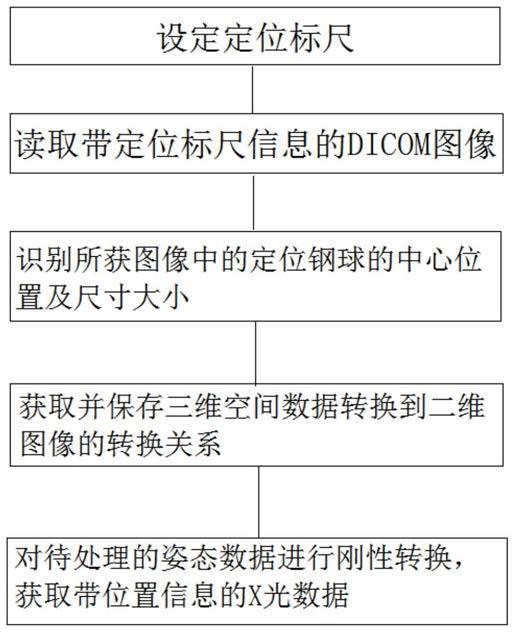
5.一种带有位置信息的x光数据二维标定处理方法,其特征在于,包括以下步骤:
6.步骤1:设置定位标尺,所述定位标尺包括彼此平行的两个平面,每个平面上设置6个小钢球,其中四个小钢球分别位于标定正方形的四个顶角上,一个钢球位于所述标定正方形的中心点处,第6个小钢球位于标定正方形一边长的延长线末端,且所述延长线长度为标定正方形变长的一半;
7.步骤2:数据采集模块读取含有标记点信息的dicom图像,识别所获数据中的小钢球的中心位置及尺寸大小;
8.步骤3:获取并保存三维空间数据转换到二维图像的转换关系;
9.步骤4:获取待处理的姿态数据后,将姿态数据和步骤3所获的三维到二维转换关系,通过刚性变换即可获得最终结果,即通过c形臂拍摄的x光图实时显示手术工具的空间位置信息。
10.本发明所述步骤2具体为:
11.步骤2-1:通过hough变换来识别图像中的圆形;
12.步骤2-2:求取圆形的hough变换算子与原始灰度图像之梯度矩阵或边缘强度图像之间的卷积,卷积结果为一个2d积累空间;
13.步骤2-3:对步骤2-2获得的2d积累空间进行分析,确定其中峰的位置及高度,对位置及高度数据再进行处理,最终求取原始图像中待测圆形物体的中心位置及尺寸大小。
14.本发明步骤3具体为:
15.步骤3-1:将小钢球在理想图像中投影的质心的像素坐标记为[u,v]
t
,
[0016][0017]
表示小钢球在图像中投影的质心的像素坐标q
11
,q
12
,q
13
,q
14
,q
15
,q
16
,q
17
,q
21
,q
22
,q
23
,q
24
,q
25
,q
26
,q
27
为带求解矩阵参数,[x,y,z,xy,yz,xz,1]
t
为小钢球中心三维坐标的二次形式,则即为待求的3d到2d的转换映射参数;步骤3-2:采用最小二乘法求解矩阵(2),其中[x,y,z]
t
为线性部分,将空间位置和图像中对应的投影位置进行线性拟合,[xy,yz,xz]
t
作为误差补偿;
[0018]
步骤3-3:将所得的三维空间数据转换到二维图像的转换关系保存到存储器中。
[0019]
本发明与现有技术相比,能够在二维的透视图像中实时显示其位置信息,整个手术过程的效率及成功率将大大提高。
附图说明:
[0020]
附图1是本发明中定位标尺的示意图。
[0021]
附图2是本发明的流程图。
具体实施方式:
[0022]
实施例1:
[0023]
如附图1及附图2所示,本发明提出了一种带有位置信息的x光数据二维标定处理方法,具体为:
[0024]
步骤1:读取含有标记点信息的dicom图像(正位或侧位),所述标记点是安装在定位标尺上的钢球,其中定位标尺上的钢球分布如附图1所示,编号为1,3,4,5的钢球分别位于标定正方形的四个顶角,编号6的钢球在正方形的中心点,编号2的钢球在标定正方形的在一条边的延长线上,且编号为2钢球位置是标定正方形边长的一半;
[0025]
步骤2:识别dicom图像中的圆形,其中具体包括:
[0026]
步骤2-1:使用opencv中的高斯模糊函数,消除dicom图像的噪点;
[0027]
步骤2-2:使用opencv的canny函数,对步骤2-1处理后的图像进行锐化处理,以便加强图像的边沿和轮廓;
[0028]
步骤2-3:通过hough变换来识别步骤2-2处理后的图像中的圆形,得到圆形的中心位置及尺寸大小;
[0029]
步骤3:获取三维空间数据转换到二维图像的转换关系,具体为:
[0030]
步骤3-1:定位标尺上的钢球空间三维坐标是已知的,通过上述步骤,也知晓了钢
球在dicom图像中的二维坐标,根据公式
[0031][0032]
则即为待求的钢球的空间三维坐标与其在dicom图像中的二维坐标之间的转换关系;
[0033]
步骤3-2:采用最小二乘法求解矩阵(2),其中[x,y,z]
t
为线性部分,将空间位置和图像中对应的投影位置进行线性拟合,[xy,yz,xz]
t
作为误差补偿;
[0034]
步骤3-3:将所得的三维空间数据转换到二维图像的转换关系保存到存储器中;
[0035]
步骤4:获取具有位置信息的x光图像;获取待处理的姿态数据后,将姿态数据和步骤3所获的三维到二维转换关系,通过刚性变换即可获得最终结果,即通过c形臂拍摄的x光图可以实时显示手术工具的空间位置信息。
[0036]
本发明与现有技术相比,能够在二维的透视图像中实时显示其位置信息,整个手术过程的效率及成功率将大大提高。
技术特征:
1.一种带有位置信息的x光数据二维标定处理方法,其特征在于,包括以下步骤:步骤1:设置定位标尺,所述定位标尺包括彼此平行的两个平面,每个平面上设置6个小钢球,其中四个小钢球分别位于标定正方形的四个顶角上,一个钢球位于所述标定正方形的中心点处,第6个小钢球位于标定正方形一边长的延长线末端,且所述延长线长度为标定正方形变长的一半;步骤2:数据采集模块读取含有标记点信息的dicom图像,识别所获数据中的小钢球的中心位置及尺寸大小;步骤3:获取并保存三维空间数据转换到二维图像的转换关系;步骤4:获取待处理的姿态数据后,将姿态数据和步骤3所获的三维到二维转换关系,通过刚性变换即可获得最终结果,即通过c形臂拍摄的x光图实时显示手术工具的空间位置信息。2.根据权利要求1所述的一种带有位置信息的x光数据二维标定处理方法,其特征在于,所述步骤2具体为:步骤2-1:通过hough变换来识别图像中的圆形;步骤2-2:求取圆形的hough变换算子与原始灰度图像之梯度矩阵或边缘强度图像之间的卷积,卷积结果为一个2d积累空间;步骤2-3:对步骤2-2获得的2d积累空间进行分析,确定其中峰的位置及高度,对位置及高度数据再进行处理,最终求取原始图像中待测圆形物体的中心位置及尺寸大小。3.根据权利要求1所述的一种带有位置信息的x光数据二维标定处理方法,其特征在于,步骤3具体为:步骤3-1:将小钢球在理想图像中投影的质心的像素坐标记为[u,v]
t
,,表示小钢球在图像中投影的质心的像素坐标q
11
,q
12
,q
13
,q
14
,q
15
,q
16
,q
17
,q
21
,q
22
,q
23
,q
24
,q
25
,q
26
,q
27
为带求解矩阵参数,[x,y,z,xy,yz,xz,1]
t
为小钢球中心三维坐标的二次形式,则即为待求的3d到2d的转换映射参数;步骤3-2:采用最小二乘法求解矩阵(2),其中[x,y,z]
t
为线性部分,将空间位置和图像中对应的投影位置进行线性拟合,[xy,yz,xz]
t
作为误差补偿;步骤3-3:将所得的三维空间数据转换到二维图像的转换关系保存到存储器中。
技术总结
本发明涉及一种带有位置信息的X光数据二维标定处理方法,设置定位标尺,所述定位标尺包括彼此平行的两个平面,每个平面上设置6个小钢球,其中四个小钢球分别位于标定正方形的四个顶角上,一个钢球位于所述标定正方形的中心点处,第6个小钢球位于标定正方形一边长的延长线末端,且所述延长线长度为标定正方形变长的一半;数据采集模块读取含有标记点信息的DICOM图像,识别所获数据中的小钢球的中心位置及尺寸大小;获取并保存三维空间数据转换到二维图像的转换关系;获取待处理的姿态数据后,将姿态数据和所获的三维到二维转换关系,通过刚性变换即可获得最终结果,即通过C形臂拍摄的X光图实时显示手术工具的空间位置信息。息。
技术研发人员:王炳强 刘畅 康伟伟 孙之建
受保护的技术使用者:威海威高骨科手术机器人有限公司
技术研发日:2021.01.30
技术公布日:2022/5/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1