智能防疫机器人
1.本实用新型涉及一种公共卫生防疫机器人技术领域,尤其是智能防疫机器人。
背景技术:
2.目前,疫情防控主要有两种形式:现场人工调控和运用防疫机器人,人工调控的方式效率低下,且成本高。中国实用新型专利cn202020609250.6公开了一种室内消毒防疫机器人,该实用新型利用消毒液可实现室内消毒、自主避障、规划行驶路径等功能,但却无法进行人机交互,无法进行智能救助,只能应用于室内无人的场所。可见在执行复杂任务方面仍有差距。因此,需要进一步的改进。
技术实现要素:
3.为了克服现有技术中防疫机器人产品功能单一,智能化不足的等缺陷,本实用新型提供一款防疫机器人,能够在有人或无人的场所均实现病菌消杀,能够避免人与人之间的接触,进行紫外线消杀,体温监测,还能进行智能救助,为身体不适者提供医疗用品和联系救护人员,既节省了人力,更能保障室内行人的健康和环境的安全。
4.本实用新型解决其技术问题所采用的技术方案是:智能防疫机器人,包括热红外传感摄像模块(1)、红外传感模块(2)、救助柜(3)、电子显示屏(4)、无线通讯模块(5)、紫外线消杀灯(6)、语音模块(7),其特征在于,所述热红外传感摄像模块(1)识别结果可触发所述救助柜(3)自动打开和收回以及发送救助信号,并触发所述紫外线消杀灯(6)打开和关闭。
5.本实用新型的有益效果是:本实用新型可以实现路径巡回,代替人工进行紫外线消杀。本实用新型可以识别晕倒和受伤人员,实现智能救助,本实用新型功能多样,应变场景灵活,智能性强,检测效率更高,反应速度更快,全程从紫外线消杀,体温检测,人机交互,再到提供医疗用品,进行救护通讯,都实现了无接触的特点,代替了人工劳动,减少了疾病传播风险。
附图说明
6.下面结合附图和实施例对本实用新型进一步说明。
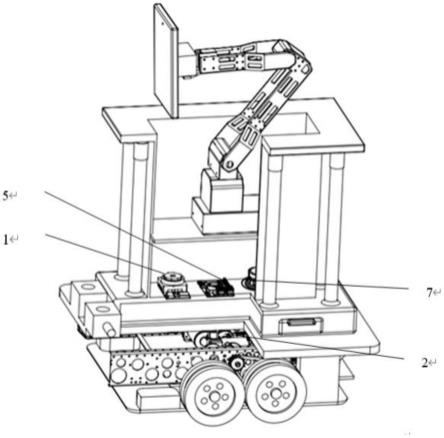
7.图1为本实用新型所述的智能防疫机器人的示意简略图。
8.图2为本实用新型所述的智能防疫机器人的示意剖面图。
9.图3为本实用新型所述的智能救助系统框图。
10.图4为本实用新型所述的智能救助系统的流程示意图。
11.图5为本实用新型所述的紫外线消杀与路径规划系统框图。
12.图6为本实用新型所述的紫外线消杀与路径规划系统的流程示意图。
13.附图标记:1、热红外传感摄像模块;2、红外传感模块;3、救助柜; 4、电子显示屏;5、无线通讯模块;6、紫外线消杀灯;7、语音模块
具体实施方式
14.参见图1和图2为智能防疫机器人的示意图,包括热红外传感摄像模块 1、红外传感模块2、救助柜3、电子显示屏4、无线通讯模块5、紫外线消杀灯6、语音模块7。热红外传感摄像模块1和红外传感模块2用于识别周围环境,发现晕倒人员,无线通讯模块5用于上传获取到的热红外图像到云端控制端的数据库,执行程序进行热红外图像数据库对比;语音模块7用于进行语音播报和呼叫,呼叫救护人员的同时,语音提示现场人员进行暂时利用救助柜3 取得简单的物资进行救助。
15.参见图3为智能救助系统框图,热红外传感与摄像模块获取热红外图像,通过i/o接口传送到控制主板,利用无线通讯模块上传到图像库,然后将该热红外图像与热红外图像数据库对比,再利用无线通讯模块将结果反馈回所述智能防疫机器人的控制面板。如果识别出人员晕倒,则利用图像结果执行语音模块和救助柜板块。如果未识别出人员晕倒,则绕开障碍物,继续行驶。
16.参见图4为所述的智能救助的流程示意图:热红外传感器对检测目标进行温度检测,将所检测的温度数据与人体温度匹配。若所测温度与人体温度不匹配,则智能防疫机器人继续沿规划路径前行。若所测温度与人体温度匹配,则开启热红外摄像,进行图片拍取,同时上传到数据库中。若所拍图片匹配数据库中的模型,则识别出有人晕倒。若所拍图片不匹配数据库中的模型,则返回不匹配信号,智能防疫机器人继续前行。
17.进一步地,参见图4,上述得到有人晕倒的结论后,则会发送救助信号。通过无线通讯模块通知相关救护人员。同时,通过单片机发送信号控制步进电机,同时利用pwm算法精确计算智能救助系统的救助柜伸出距离,提供救护物资,而后发送反向信号所述救助柜自动收缩。
18.详细地,上述的智能救助系统,所述的图像数据库算法采用tensorflow 和pytorch搭建,通过卷积神经网络对图像进行分类识别,系统经过人工智能算法和深度学习训练后,可通过计算结果与图像数据的进行对比识别人员晕倒情况。
19.参见图5为所述的紫外线消杀与路径规划系统框图,热红外传感与摄像模块、红外传感模块通过i/o接口传送到控制主板,利用无线通讯模块上传到云端控制端的数据库,执行程序进行热红外图像数据库对比,判断四周是否有行人,得出结论。红外传感模块用于测量四周有无障碍物,所测数据通过i/o 接口传送到控制主板,利用无线通讯模块上传到数据库。数据库中的信息将会被路径规划程序所提取,用于构建行驶路径。再利用无线通讯模块将结果反馈回机器人的控制面板。若四周无人,则会打开紫外线消杀模块。若四周有人,则不开启紫外线消杀模块,继续正常行驶。
20.具体地,参见图6为所述的紫外线消杀与路径规划系统的流程示意图:无线通讯模块传送的信息会通过数据库进行对比,从而得出四周是否有行人的结论。若四周有行人,则不开启紫外线消杀模块,按d*算法所规划的路径正常行驶。若四周没有行人,则执行路径规划程序。在程序中自动查看栅格地图中的近期行驶路线。然后根据卡尔曼滤波算法和d*算法自动规划近期未开启紫外线消杀模块行驶过的路线。在开启紫外线消杀模块行驶的过程中,通过热红外传感与摄像模块和红外传感模块判断行驶过程中是否有行人。若有行人,则关闭紫外线灯。若没有行人,则继续行驶。
21.详细地,上述的紫外线消杀与路径规划系统,所述的路径规划程序,是利用了卡尔
曼滤波算法精确判定室内流动人员的位置坐标,再采用d*算法实现智能防疫机器人的动态路径规划。
22.本实用新型所述的智能防疫机器人,可以进行紫外线消杀,可以识别人员晕倒并对其进行智能救助,可以提供救助物资,可以进行体温检测,可以进行人机交互。本实用新型功能多样,应变场景灵活,智能性强,检测效率高,反应速度快,可以适用于所有平地室内场所,有效代替人工劳动,减少疾病传播的风险。
23.本实用新型是通过优选实施例进行描述的,部分内容使用了现有技术,望本领域技术人员知悉,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。本实用新型不受此处所公开的具体实施例的限制,其他落入本申请的权利要求内的实施例都属于本实用新型保护的范围。
技术特征:
1.智能防疫机器人,包括热红外传感摄像模块(1)、红外传感模块(2)、救助柜(3)、电子显示屏(4)、无线通讯模块(5)、紫外线消杀灯(6)、语音模块(7),其特征在于,所述热红外传感摄像模块(1)识别结果可触发所述救助柜(3)自动打开和收回以及发送救助信号,并触发触发所述紫外线消杀灯(6)打开和关闭。2.根据权利要求1所述的智能防疫机器人,其特征在于,还包括紫外线消杀与路径规划系统、热红外传感与摄像系统、智能救助系统、人机交互系统,所述无线通讯模块(5)与所述紫外线消杀与路径规划系统、热红外传感与摄像系统、智能救助系统、人机交互系统进行数据的接收和发送。3.根据权利要求2所述的智能防疫机器人,其特征在于,所述热红外传感与摄像系统由热红外传感模块、热红外传感摄像模块(1)、体温检测模块、云端热红外图像数据库和图像模型库对比组成。4.根据权利要求3所述的智能防疫机器人,其特征在于,所述紫外线消杀与路径规划系统由紫外线消杀灯(6)、红外传感模块(2)、路径规划模块、视像播报模块、伺服电机、行驶轮子、语音播报模块、播音器组成。5.根据权利要求4所述的智能防疫机器人,其特征在于,所述智能救助系统由救助柜(3)、步进电机驱动器、单片机、控制主板和控制面板组成。6.根据权利要求5所述的智能防疫机器人,其特征在于,所述人机交互系统由电子显示屏(4)、语音模块(7)、云端语音库、语音特征模型库对比及结果库组成。
技术总结
本实用新型公开了一种智能防疫机器人,包括紫外线消杀与路径规划系统、热红外传感与摄像系统、智能救助系统、人机交互系统。其特征在于,所述紫外线消杀与路径规划系统会通过热红外传感与摄像系统在特定区域进行紫外线消杀,所述热红外传感与摄像系统可识别晕倒人员,从而触发智能救助系统发出警报并通过无线通讯模块进行信号传输,告知相关救护人员。本实用新型可以实现紫外线消杀,自动避障,进行人机交互,红外测温,进行路径规划,为晕倒者或身体不适者进行智能救助,功能多样,应变场景灵活,智能性强,有效代替人工劳动,有效弥补夜间、复杂情况下(人员混杂等)的防疫巡检弱点,保障区域环境的安全,减少了疾病传播的风险。减少了疾病传播的风险。减少了疾病传播的风险。
技术研发人员:姚屏 陈浩民 陈弘州 刘浩然 徐志城 胡菲颖 聂筠
受保护的技术使用者:广东技术师范大学
技术研发日:2021.09.06
技术公布日:2022/8/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1