一种基于轨迹预测的行人碰撞预警方法
1.本发明属于轨迹预测技术领域,具体而言涉及一种基于轨迹预测的行人碰撞预警方法。
背景技术:
2.随着我国人口密度增大以及行人设施的普及,类似步行街、游乐场等场所的步行人密度迅速提升。外加智能手机对行人的影响,行人间发生碰撞的几率增加,导致人员矛盾增加,严重的还会在碰撞时造成的伤害,进而产生的民事纠纷。
3.因此,现在急需一种可以实时对可能发生的碰撞进行检测,有效地对碰撞进行预警,降低事故发生的概率。
技术实现要素:
4.本发明针对现有技术中的不足,提供一种基于轨迹预测的行人碰撞预警方法,通过对行人的历史轨迹进行分析,提前预测行人轨迹和终点,可以有效地对碰撞进行预警,降低事故发生的概率。
5.为实现上述目的,本发明采用以下技术方案:
6.本发明实施例提出了一种基于轨迹预测的行人碰撞预警方法,所述预警方法包括以下步骤:
7.s1,筛选出密集人流数据集中存在碰撞和轨迹重叠的数据,生成轨迹碰撞数据集;
8.s2,针对轨迹碰撞数据集中的每个样本,提取相应的行人的历史轨迹,其中,将行人pj与pk的历史轨迹分别设为与轨迹终点分别设为与
9.s3,采用历史轨迹编码器e
past
对步骤s2中提取的行人的历史轨迹进行编码,将图像信息转换成数组,得到与采用轨迹终点编码器e
end
对轨迹终点进行编码,得到与
10.s4,将上述步骤s3中得到的和级联,输入到潜空间编码器e
latent
,得到刻画变分自编码器潜变量的参数,具体计算方式如下:
[0011][0012][0013]
s5,根据潜变量参数对可能的轨迹终点进行采样,将采样结果分别与级联后送入潜空间解码器d
latent
,得到对轨迹终点的预测;
[0014]
s6,根据所预测的轨迹和终点,对行人进行碰撞预警。
[0015]
进一步地,步骤s1中,生成轨迹碰撞数据集的具体步骤如下:
[0016]
s11,在比对范围l内,预设碰撞预警距离dt1和碰撞安全距离dt2,输入轨迹数据集预警距离dt1和碰撞安全距离dt2,输入轨迹数据集进行轨迹计算,其中,
[0017]
s12,生成轨迹碰撞数据集
[0018]
其中,
[0019][0020]
进一步地,步骤s5中,对轨迹终点的预测的具体步骤如下:
[0021]
s51,根据潜变量参数对可能的轨迹终点进行采样,对行人pj与pk的轨迹终点和进行预测,计算公式如下:
[0022][0023][0024]
s52,将上述步骤s51中得到的轨迹终点和分别与历史轨迹和进行级联,得到对终点约束的碰撞预测与
[0025]
s53,根据上述步骤得到的碰撞预测值与进行级联,送入到碰撞标签预测子网络p
label
,对终点约束的碰撞标签和碰撞中心坐标进行预测,得到预测终点约束的碰撞标签和终点约束的碰撞中心坐标计算公式如下:
[0026][0027][0028]
其中,为进行完整网络的端到端训练,对损失函数进行设计如下:
[0029][0030][0031][0032][0033]
[0034][0035]
其中,kld为散度项用于训练变分自编码器;ael为轨迹终点误差项用于训练轨迹终点编码器e
end
、历史轨迹编码器e
past
、潜空间编码器e
latent
、潜空间解码器d
latent
;atl为轨迹预测损失项用于训练轨迹预测子网络p
future
及相关前处理模块;cll为碰撞标签预测损失项用于训练碰撞标签预测子网络p
label
及相关前处理模块;ccl为碰撞中心坐标预测损失项用于训练碰撞中心坐标预测子网络p
coord
及相关前处理模块。
[0036]
进一步地,所述碰撞检测指标包括精度、准确度、召回率、f1得分和碰撞中心坐标预测误差;其中,碰撞中心坐标误差为预测碰撞中心坐标与真实碰撞中心坐标间的l
2-距离,具体计算公式如下:
[0037][0038][0039][0040][0041][0042]
有益效果:
[0043]
第一,本发明提出的基于轨迹预测的行人碰撞预警方法,通过对样本数据集进行分析,获取行人的历史轨迹,进行预测行人轨迹和终点,可以有效地对碰撞进行预警,降低事故发生的概率。
[0044]
第二,本发明提出的基于轨迹预测的行人碰撞预警方法,通过筛选出密集人流数据集中存在碰撞和轨迹重叠的数据聚集以符合该算法研究的场景与环境,避免了不必要的运算,同时排除一些干扰项,提高了参数的精确度。
[0045]
第三,本发明提出的基于轨迹预测的行人碰撞预警方法,通过二次对预测的轨迹和终点进行行人检测碰撞保证了数据的准确性和精准度。
附图说明
[0046]
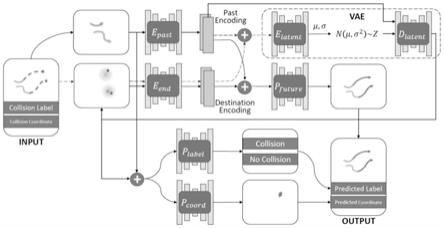
图1为本发明实施例的基于轨迹预测的行人碰撞预警方法的算法流程示意图。
[0047]
图2为本发明实施例的基于轨迹预测的行人碰撞预警方法的数据集算法流程示意图。
具体实施方式
[0048]
下面的实施例可使本专业技术人员更全面地理解本发明,但不以任何方式限制本发明。
[0049]
图1为本发明实施例的基于轨迹预测的行人碰撞预警方法的算法流程示意图。本实施例提出了一种基于轨迹预测的行人碰撞预警方法,该方法包括以下步骤:
[0050]
s1,筛选出密集人流数据集中存在碰撞和轨迹重叠的数据,生成轨迹碰撞数据集。
[0051]
s2,针对轨迹碰撞数据集中的每个样本,提取相应的行人的历史轨迹,其中,将行人pj与pk的历史轨迹分别设为与轨迹终点分别设为与
[0052]
s3,采用历史轨迹编码器e
past
对步骤s2中提取的行人的历史轨迹进行编码,将图像信息转换成数组,得到与采用轨迹终点编码器e
end
对轨迹终点进行编码,得到与
[0053]
s4,将上述步骤s3中得到的和级联,输入到潜空间编码器e
latent
,得到刻画变分自编码器潜变量的参数,具体计算方式如下:
[0054][0055][0056]
s5,根据潜变量参数对可能的轨迹终点进行采样,将采样结果分别与级联后送入潜空间解码器d
latent
,得到对轨迹终点的预测。
[0057]
s6,根据所预测的轨迹和终点,对行人进行碰撞预警。
[0058]
一、获取样品数据集
[0059]
选定检测区域,筛选出密集人流数据集中存在碰撞和轨迹重叠的数据,生成相应的样本数据集。
[0060]
二、提取行人的历史轨迹
[0061]
图2为本发明实施例的基于轨迹预测的行人碰撞预警方法的数据集算法流程示意图。本实施例在比对范围l内,设定碰撞预警距离dt1和碰撞安全距离dt2。
[0062]
通过对数据集的每一样本进行数据提前,设定行人pj与pk的历史轨迹与轨迹终点与
[0063]
输入:轨迹数据集其中
[0064]
输出:轨迹碰撞数据集其中其中
[0065]
通过上述计算获取历史轨迹数据。
[0066]
三、编码
[0067]
通过历史轨迹编码器,我们可以将视频中人流的轨迹信息,转换成可以被潜空间编码器识别的参数。即将图像信息转化为数组,以方便投入潜空间编码器。使用历史轨迹编码器e
past
对历史轨迹进行编码,得到与
[0068]
将筛选出的终点信息进行编码,使用终点轨迹编码器对终点坐标进行编码。即使
用轨迹终点编码器e
end
对轨迹终点进行编码,得到与
[0069]
四、获取潜变量的参数
[0070]
根据上述步骤生成的参数级联到潜空间编码器中。即将与与级联送入潜空间编码器e
latent
,得到刻画变分自编码器潜变量的参数。具体计算方式如下:
[0071][0072][0073]
五、预测轨迹和终点
[0074]
根据潜变量参数对可能的终点轨迹进行采样,并送入解码器,得到轨迹终点的预测。即根据潜变量参数对可能的轨迹终点进行采样,并分别与级联后送入潜空间解码器d
latent
,得到对轨迹终点的预测。
[0075][0076][0077]
得到对行人pj与pk的轨迹终点预测后,将其分别与历史轨迹进行级联,得到终点约束的碰撞预测输入
[0078]
将级联后,送入碰撞标签预测子网络p
label
,得到终点约束的碰撞标签预测:
[0079][0080]
将级联后,送入碰撞中心坐标预测子网络p
coord
,得到终点约束的碰撞中心坐标预测:
[0081][0082]
为进行完整网络的端到端训练,对损失函数进行设计如下:
[0083][0084]
其中,kld为散度项用于训练变分自编码器;ael为轨迹终点误差项,用于训练轨迹终点编码器e
end
、历史轨迹编码器e
past
、潜空间编码器e
latent
、潜空间解码器d
latent
;atl为轨迹预测损失项用于训练轨迹预测子网络p
future
及相关前处理模块;cll为碰撞标签预测损失
项用于训练碰撞标签预测子网络p
label
及相关前处理模块;ccl为碰撞中心坐标预测损失项用于训练碰撞中心坐标预测子网络p
coord
及相关前处理模块,具体计算公式如下:
[0085][0086][0087][0088][0089][0090]
其中,碰撞检测这指标如下:
[0091][0092][0093][0094][0095][0096]
accuracy为精度;precision为准确率;recall为召回率;f1-score为f1得分;coord error为碰撞中心坐标预测误差,即预测碰撞中心坐标与真实碰撞中心坐标间的l
2-距离。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1