用于驱动双极性步进电机的配合电路及驱动电路的制作方法
1.本发明涉及步进电机驱动电路,特别涉及一种用于驱动双极性步进电机的配合电路及驱动电路。
背景技术:
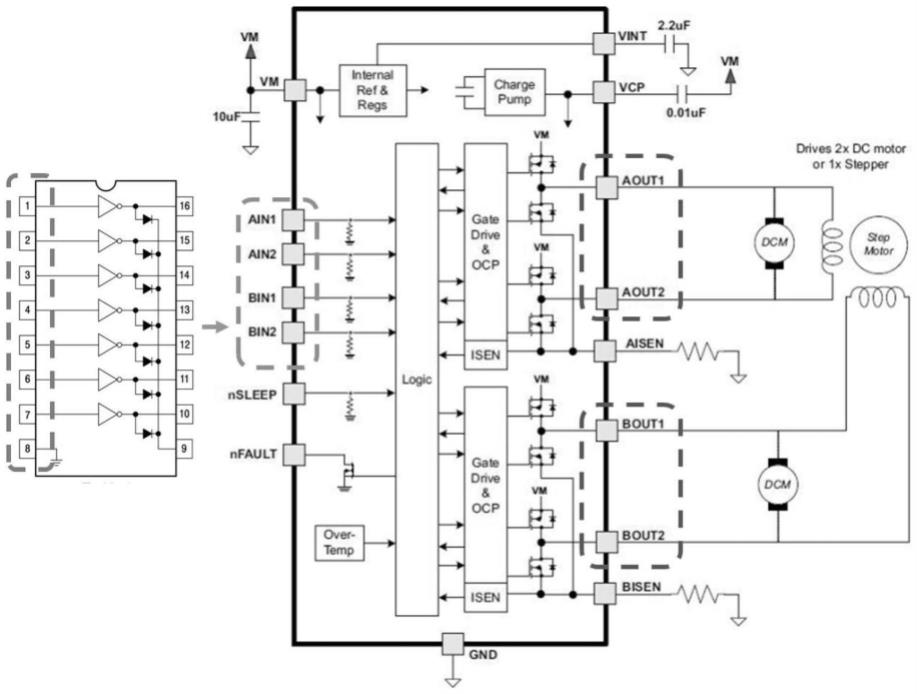
2.双极性步进电机的驱动控制一般需要通过双极性步进电机专用驱动器来与达林顿管连接。达林顿管通过接收来自mcu等可编程器的输入信号,向双极性步进电机专用驱动器输入电平脉冲,然后由双极性步进电机专用驱动器输出电压控制双极性步进电机,具体连接可参见附图1。而单极性步进电机的驱动相对简单,可以直接通过达林顿管与单极性步进电机进行连接,具体可参见附图2。
3.现有市面上存在大量单极性步进电机驱动器控制单极性步进电机的装置。但是由于单极性电机的力矩普遍偏小和转速偏低。随着技术发展,人们需要对这些装置进行改进,常见需求就是想将单极性步进电机更换成双极性步进电机,这样就能将电机的力矩和转速都得到提升。但是在进行双极性步进电机改进时,需要配套相应的双极性步进电机专用驱动器。同时又因为单极性步进电机驱动器通常都集成在客户主板上,因此变更难度大,且增加成本。
技术实现要素:
4.本发明的第一个目的是用于驱动双极性步进电机的配合电路,让已经集成单极性步进电机驱动器的驱动板能够通过简单的改造即可直接用于驱动双极性步进电机,大大降低改造难度,降低改造成本。
5.实现本发明第一个目的的技术方案是:本发明中用于驱动双极性步进电机的配合电路,包括四个三极管q1、q2、q3和q4,四个电阻r1、r2、r3和r4,以及四个用于与双极性步进电机的引出线连接的接线端aout1、aout2、bout1和bout2;三极管q1的基极与电阻r1的一端连接,电阻r1的另一端与三极管q2的集电极汇接在接线端aout2上;三极管q2的基极与电阻r2的一端连接,电阻r2的另一端与三极管q1的集电极汇接在接线端aout1上;
6.三极管q3的基极与电阻r3的一端连接,电阻r3的另一端与三极管q4的集电极汇接在接线端bout2上;三极管q4的基极与电阻r4的一端连接,电阻r4的另一端与三极管q3的集电极汇接在接线端bout1上。
7.进一步,电阻r1与接线端aout2的连接线路上还串联有二极管d1;电阻r2与接线端aout1的连接线路上还串联有二极管d2;电阻r3与接线端bout2的连接线路上还串联有二极管d3;电阻r4与接线端bout1的连接线路上还串联有二极管d4。
8.进一步,上所述三极管q1、q2、q3和q4均采用sot-23型。
9.本发明的第二个目的是提供一种用于驱动双极性步进电机的驱动电路。
10.实现本发明第二个目的的技术方案是:本发明中用于驱动双极性步进电机的驱动电路,包括用于驱动单极性步进电机的达林顿管,上述的用于驱动双极性步进电机的配合
电路以及双极性步进电机;
11.达林顿管的引脚1c、2c、3c、4c分别与接线端aout1、aout2、bout1和bout2连接;达林顿管的钳位二级管公共端与三极管q1的发射极连接;
12.所述接线端aout1、aout2、bout1和bout2连接与双极性步进电机的引出线连接。
13.进一步,上述达林顿管的型号为uln2003a。
14.本发明具有积极的效果:(1)本发明在不改变原有的单极性步进电机控制电路的前提下,只需增加一个配合电路,即可直接用于驱动双极性步进电机,大大降低改造难度,降低改造成本。
15.(2)本发明基于配合电路,相对于传统的h桥上下桥控制方案,没有导通短路电路的风险,这也是为了可以通过配合电路直接驱动双极性步进电机的关键。
16.(3)本发明中配合电路利用四个三极管q1、q2、q3、q4,让vbe的导通电压很低(一般0.5v,远小于mos管导通电压),从而使电路工作在很低电压下。
17.(4)本发明中四个电阻r1、r2、r3、r4为限流电阻,降低三极管的烧毁风险。
18.(5)由于三极管大电流情况下会有一定的压降,本发明通过四个二极管d1、d2、d3、d4,可以保证压降在不大于这个二极管的正向压降(0.7v左右)时,电路运行正常。
附图说明
19.为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明,其中
20.图1为现有的双极性步进电机的驱动电路;
21.图2为现有的单极性步进电机的驱动电路;
22.图3为本发明中用于驱动双极性步进电机的配合电路;
23.图4为本发明中用于驱动双极性步进电机的驱动电路。
具体实施方式
24.见图3,本发明中用于驱动双极性步进电机的配合电路,包括四个三极管q1、q2、q3和q4,四个二极管d1、d2、d3和d4,四个电阻r1、r2、r3和r4,以及四个用于与双极性步进电机的引出线连接的接线端aout1、aout2、bout1和bout2;三极管q1的基极与电阻r1的一端连接,电阻r1的另一端与三极管q2的集电极汇接在接线端aout2上;三极管q2的基极与电阻r2的一端连接,电阻r2的另一端与三极管q1的集电极汇接在接线端aout1上;
25.三极管q1的基极与电阻r1的一端连接,电阻r1的另一端与二极管d1的正极连接,二极管d1的负极与三极管q2的集电极汇接在接线端aout2上;三极管q2的基极与电阻r2的一端连接,电阻r2的另一端与二极管d2的正极连接,二极管d2的负极与三极管q1的集电极汇接在接线端aout1上;
26.三极管q3的基极与电阻r3的一端连接,电阻r3的另一端与二极管d3的正极连接,二极管d3的负极与三极管q4的集电极汇接在接线端bout2上;三极管q4的基极与电阻r4的一端连接,电阻r4的另一端与二极管d4的正极连接,二极管d4的负极与三极管q3的集电极汇接在接线端bout1上。
27.所述三极管q1、q2、q3和q4均采用sot-23型。
28.见图4,本发明中用于驱动双极性步进电机的驱动电路,包括用于驱动单极性步进电机的达林顿管,上述的用于驱动双极性步进电机的配合电路以及双极性步进电机;
29.达林顿管的引脚1c、2c、3c、4c分别与接线端aout1、aout2、bout1和bout2连接;达林顿管的钳位二级管公共端与三极管q1的发射极连接;
30.所述接线端aout1、aout2、bout1和bout2连接与双极性步进电机的引出线连接。
31.其中引脚1c、2c、3c、4c分别对应图4中的引脚编号16、15、14、13;所述达林顿管的钳位二级管公共端对应图4中的引脚编号9。
32.所述达林顿管的型号为uln2003a。
33.以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种用于驱动双极性步进电机的配合电路,其特征在于:包括四个三极管q1、q2、q3和q4,四个电阻r1、r2、r3和r4,以及四个用于与双极性步进电机的引出线连接的接线端aout1、aout2、bout1和bout2;三极管q1的基极与电阻r1的一端连接,电阻r1的另一端与三极管q2的集电极汇接在接线端aout2上;三极管q2的基极与电阻r2的一端连接,电阻r2的另一端与三极管q1的集电极汇接在接线端aout1上;三极管q3的基极与电阻r3的一端连接,电阻r3的另一端与三极管q4的集电极汇接在接线端bout2上;三极管q4的基极与电阻r4的一端连接,电阻r4的另一端与三极管q3的集电极汇接在接线端bout1上。2.根据权利要求1所述的一种用于驱动双极性步进电机的配合电路,其特征在于:电阻r1与接线端aout2的连接线路上还串联有二极管d1;电阻r2与接线端aout1的连接线路上还串联有二极管d2;电阻r3与接线端bout2的连接线路上还串联有二极管d3;电阻r4与接线端bout1的连接线路上还串联有二极管d4。3.根据权利要求1所述的一种用于驱动双极性步进电机的配合电路,其特征在于:所述三极管q1、q2、q3和q4均采用sot-23型。4.一种用于驱动双极性步进电机的驱动电路,其特征在于:包括用于驱动单极性步进电机的达林顿管,权利要求1或2或3所述的用于驱动双极性步进电机的配合电路以及双极性步进电机;达林顿管的引脚1c、2c、3c、4c分别与接线端aout1、aout2、bout1和bout2连接;达林顿管的钳位二级管公共端与三极管q1的发射极连接;所述接线端aout1、aout2、bout1和bout2连接与双极性步进电机的引出线连接。5.根据权利要求4所述的一种用于驱动双极性步进电机的驱动电路,其特征在于:所述达林顿管的型号为uln2003a。
技术总结
本发明涉及一种用于驱动双极性步进电机的配合电路及驱动电路,包括四个三极管Q1、Q2、Q3和Q4,四个电阻R1、R2、R3和R4,四个用于与双极性步进电机的引出线连接的接线端AOUT1、AOUT2、BOUT1和BOUT2;三极管Q1的基极与电阻R1的一端连接,电阻R1的另一端与三极管Q2的集电极汇接在接线端AOUT2上;三极管Q2的基极与电阻R2的一端连接,电阻R2的另一端与三极管Q1的集电极汇接在接线端AOUT1上;三极管Q3的基极与电阻R3的一端连接,电阻R3的另一端与三极管Q4的集电极汇接在接线端BOUT2上;三极管Q4的基极与电阻R4的一端连接,电阻R4的另一端与三极管Q3的集电极汇接在接线端BOUT1上。本发明能够利用单极性步进电机驱动器驱动双极性步进电机,大大降低变更难度。大大降低变更难度。大大降低变更难度。
技术研发人员:于谦
受保护的技术使用者:江苏精研科技股份有限公司
技术研发日:2022.03.29
技术公布日:2022/8/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1