一种智能图像识别人体联动控制装置的制作方法
1.本实用新型属于智能图像识别技术领域,具体为一种智能图像识别人体联动控制装置。
背景技术:
2.图像识别,是指利用计算机对图像进行处理、分析和理解,以识别各种不同模式的目标和对象的技术,是应用深度学习算法的一种实践应用。现阶段图像识别技术一般分为人脸识别与商品识别,人脸识别主要运用在安全检查、身份核验与移动支付中;商品识别主要运用在商品流通过程中,特别是无人货架、智能零售柜等无人零售领域。
3.一般的智能图像识别人体联动控制装置在使用的过程中,由于其视角范围有限,因此需要被识别图像来回晃动提高识别的可能性,操作较为繁琐。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本实用新型提供一种智能图像识别人体联动控制装置,有效的解决了一般的智能图像识别人体联动控制装置在使用的过程中,由于其视角范围有限,因此需要被识别图像来回晃动提高识别的可能性,操作较为繁琐的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种智能图像识别人体联动控制装置,包括底座,所述底座的顶端连接有支撑杆,支撑杆的顶端连接有壳体,壳体的内部设置有驱动组件,驱动组件上转动连接有移动板,移动板上转动连接有安装板,安装板上连接有摄像头,且移动板与顶盖之间滑动连接,顶盖与驱动组件之间转动连接。
6.优选的,所述驱动组件包括与壳体连接的电机,电机的输出端连接有主动齿轮,主动齿轮啮合连接有移动齿轮,移动齿轮与内齿圈啮合连接,内齿圈与壳体连接。
7.优选的,所述移动齿轮位于主动齿轮与内齿圈之间,且移动齿轮的半径尺寸大于壳体与顶盖之间形成的间隙尺寸。
8.优选的,所述移动板与安装板之间通过销轴转动连接,销轴上套接有扭簧,扭簧的一端与移动板连接,扭簧的另一端与安装板连接。
9.优选的,所述顶盖与主动齿轮之间转动连接,顶盖上开设有环形槽,环形槽内滑动连接有环形块,环形块与移动板连接。
10.优选的,所述壳体的边缘还等距连接有凸块,凸块的两侧均形成斜面,且斜面对称设置。
11.优选的,所述底座上等距开设有安装孔,且底座的内部还嵌设有磁铁。
12.与现有技术相比,本实用新型的有益效果是:
13.1)、在工作中,通过设置的驱动组件,能够带动摄像头进行圆周运动,从而增加摄像头的视角范围,提高其对图像识别的成功率;
14.2)、在工作中,通过设置的凸块,在摄像头运动的过程中,当安装板移动到靠近凸
块的位置处,安装板受到凸块的挤压后转动,从而使其上的摄像头发生倾斜,然后在扭簧作用下,安装板回到原始位置,循环动作,能够进一步提高图像识别时的可能性,不需要被识别图像来回晃动。
附图说明
15.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。
16.在附图中:
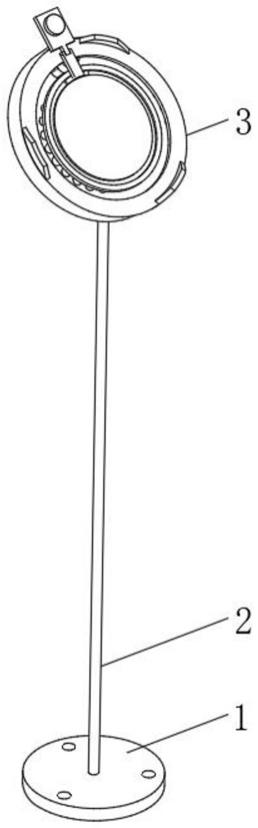
17.图1为本实用新型的结构示意图;
18.图2为本实用新型的壳体结构示意图;
19.图3为本实用新型的壳体内部结构示意图;
20.图中:1、底座;2、支撑杆;3、壳体;4、驱动组件;401、电机;402、主动齿轮;403、移动齿轮;404、内齿圈;5、移动板;6、安装板;7、摄像头;8、顶盖;801、环形槽;802、环形块;9、凸块;901、斜面。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.实施例一,由图1、图2和图3给出,本实用新型包括底座1,底座1的顶端连接有支撑杆2,支撑杆2的顶端连接有壳体3,壳体3的内部设置有驱动组件4,驱动组件4上转动连接有移动板5,移动板5上转动连接有安装板6,安装板6上连接有摄像头7,且移动板5与顶盖8之间滑动连接,顶盖8与驱动组件4之间转动连接,底座1上等距开设有安装孔101,且底座1的内部还嵌设有磁铁;
23.能够通过驱动组件4带动移动板5移动,移动板5带动安装板6上的摄像头7运动,从而增加摄像头7的视角范围,提高图像识别时的成功率;通过设置的磁铁便于将底座1吸附在适合的位置处。
24.实施例二,在实施例一的基础上,驱动组件4包括与壳体3连接的电机401,电机401的输出端连接有主动齿轮402,主动齿轮402啮合连接有移动齿轮403,移动齿轮403与内齿圈404啮合连接,内齿圈404与壳体3连接,移动齿轮403位于主动齿轮402与内齿圈404之间,且移动齿轮403的半径尺寸大于壳体3与顶盖8之间形成的间隙尺寸,顶盖8与主动齿轮402之间转动连接,顶盖8上开设有环形槽801,环形槽801内滑动连接有环形块802,环形块802与移动板5连接;
25.能够通过电机401带动主动齿轮402转动,主动齿轮402通过啮合的方式带动移动齿轮403转动,移动齿轮403沿着内齿圈404进行圆周运动,从而通过移动齿轮403带动移动板5运动,移动板5通过带动安装板6带动摄像头7运动,从而增加摄像头7的视角范围。
26.实施例三,在实施例二的基础上,移动板5与安装板6之间通过销轴转动连接,销轴上套接有扭簧,扭簧的一端与移动板5连接,扭簧的另一端与安装板6连接,壳体3的边缘还
等距连接有凸块9,凸块9的两侧均形成斜面901,且斜面901对称设置;
27.在摄像头7运动的过程中,当安装板6移动到靠近凸块9的位置处,安装板6受到凸块9的挤压后转动,从而使其上的摄像头7发生倾斜,然后在扭簧作用下,安装板6回到原始位置,循环动作,能够进一步提高图像识别时的可能性,不需要被识别图像来回晃动。
技术特征:
1.一种智能图像识别人体联动控制装置,包括底座(1),其特征在于:所述底座(1)的顶端连接有支撑杆(2),支撑杆(2)的顶端连接有壳体(3),壳体(3)的内部设置有驱动组件(4),驱动组件(4)上转动连接有移动板(5),移动板(5)上转动连接有安装板(6),安装板(6)上连接有摄像头(7),且移动板(5)与顶盖(8)之间滑动连接,顶盖(8)与驱动组件(4)之间转动连接。2.根据权利要求1所述的一种智能图像识别人体联动控制装置,其特征在于:所述驱动组件(4)包括与壳体(3)连接的电机(401),电机(401)的输出端连接有主动齿轮(402),主动齿轮(402)啮合连接有移动齿轮(403),移动齿轮(403)与内齿圈(404)啮合连接,内齿圈(404)与壳体(3)连接。3.根据权利要求2所述的一种智能图像识别人体联动控制装置,其特征在于:所述移动齿轮(403)位于主动齿轮(402)与内齿圈(404)之间,且移动齿轮(403)的半径尺寸大于壳体(3)与顶盖(8)之间形成的间隙尺寸。4.根据权利要求1所述的一种智能图像识别人体联动控制装置,其特征在于:所述移动板(5)与安装板(6)之间通过销轴转动连接,销轴上套接有扭簧,扭簧的一端与移动板(5)连接,扭簧的另一端与安装板(6)连接。5.根据权利要求3所述的一种智能图像识别人体联动控制装置,其特征在于:所述顶盖(8)与主动齿轮(402)之间转动连接,顶盖(8)上开设有环形槽(801),环形槽(801)内滑动连接有环形块(802),环形块(802)与移动板(5)连接。6.根据权利要求1所述的一种智能图像识别人体联动控制装置,其特征在于:所述壳体(3)的边缘还等距连接有凸块(9),凸块(9)的两侧均形成斜面(901),且斜面(901)对称设置。7.根据权利要求1所述的一种智能图像识别人体联动控制装置,其特征在于:所述底座(1)上等距开设有安装孔(101),且底座(1)的内部还嵌设有磁铁。
技术总结
本实用新型涉及智能图像识别技术领域,且公开了一种智能图像识别人体联动控制装置,解决了一般的智能图像识别人体联动控制装置在使用的过程中,由于其视角范围有限,因此需要被识别图像来回晃动提高识别的可能性,操作较为繁琐的问题,其包括底座,所述底座的顶端连接有支撑杆,支撑杆的顶端连接有壳体,壳体的内部设置有驱动组件,驱动组件上转动连接有移动板,移动板上转动连接有安装板,安装板上连接有摄像头,且移动板与顶盖之间滑动连接,顶盖与驱动组件之间转动连接;本实用新型,通过设置的驱动组件,能够带动摄像头进行圆周运动,从而增加摄像头的视角范围,提高其对图像识别的成功率。识别的成功率。识别的成功率。
技术研发人员:阳振华
受保护的技术使用者:广州市控捷电子科技有限公司
技术研发日:2021.12.06
技术公布日:2022/5/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1