一种具有新型仿形装置的叶菜收获机的制作方法
1.本实用新型涉及农用机械领域,具体为一种具有新型仿形装置的叶菜收获机。
背景技术:
2.我国大面积种植的蔬菜品种以叶菜类蔬菜居多,叶菜类蔬菜不仅含有丰富的蛋白质、维生素和矿物质等营养物质,而且适应性强,适合一年四季种植;绿叶菜以它鲜、嫩的品质,深受广大消费者喜爱,市场需求量大,具有更好的经济价值。在日光温室温度、光照、肥水较好的条件下,叶菜类蔬菜一般30~60天内即可收获。目前叶菜等绿色蔬菜的收获仍然依靠人力完成,劳动量大、劳动效率低下,叶菜采收成为最耗工费力的生产环节。随着劳动力成本的提高,机械化采收设备已成为趋势。
3.目前,大部分的叶菜收获机的仿形机构仿形结构调节时,整个结构以仿形机构支点为圆心旋转,仿形杆和地面的接触角度会改变,接触不良时需要调整仿形杆角度,此时收割高度会改变,对收割高度的调节带来难度。同时,左右仿形杆一般都有独立的平行机构(左右各一个平行机构),整体结构比较重。
技术实现要素:
4.本实用新型的目的在于提供一种便于调节收割高度,较轻量化的具有新型仿形装置的叶菜收获机,其具体技术方案如下:
5.一种具有新型仿形装置的叶菜收获机,其特征在于:所述叶菜收获机包括叶菜收割部分和行走部分,所述叶菜收割部分包括割刀驱动部1、收割传输台10、仿形装置 2,所述仿形装置2设置于所述收割传输台10下方,所述割刀驱动部1设置于收割传输台10前端,所述仿形装置2包括两根传感触脚31、电磁感应传感器30、一个平行机构32及一根电动调节推杆3,所述两根传感触脚31设置于所述平行机构(32)的下部,所述两根传感触脚末端连接所述电磁感应传感器30,所述电动调节推杆3设置于平行机构32后部,以调节收割高度。
6.进一步地,所述行走部分包括行走车架、驱动电机8、驱动轴6、转向器21、扭力限制器7、差速变速箱20、电瓶、一对前轮5与一对后轮9,所述驱动电机8设置于行走车架中部,其通过所述驱动轴6驱动前轮5转动,所述转向器21设置于前轮5 内侧,以控制前轮5转向,扭力限制器7设置于驱动电机8前端,以预防电机过载。
7.进一步地,所述叶菜收获机还包括方向盘12、行走以及收割控制面板13,所述行走以及收割控制面板13设置于行走车架中部,所述方向盘12设置于行走以及收割控制面板13上。
8.本实用新型带来的益处在于:
9.1、收割高度调节时,仿形杆和地面的接触角度不变,方便调节。
10.2、平行机构只有一个,相对于现有技术更轻量化。
附图说明
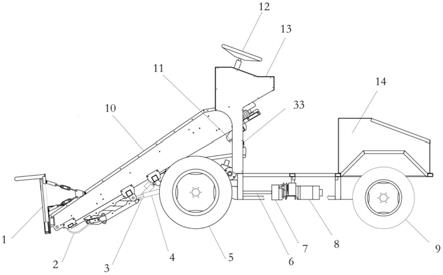
11.图1为本实用新型所述的叶菜收获机的整体侧视图;
12.图2为本实用新型所述的叶菜收获机的行走部的俯视图;
13.图3为低收割高度时仿形装置的结构图;
14.图4为高收割高度时仿形装置的结构图;
15.图5为仿形装置俯视结构图;
16.附图标记说明:
17.1、割刀驱动部;2、仿形装置;3、电动调节推杆;4、双向油缸;5、前轮;6、驱动轴;7、扭力限制器;8、驱动电机;9、后轮;10、收割传输台;11、割台后部支点;12、方向盘;13、行走以及收割控制面板;14、电瓶以及电器控制容纳箱;20、差速变速箱;21、转向器;22、链条;23、转向连杆;30、电磁感应传感器;31、传感触脚;32、平行机构;33、弹簧
具体实施方式
18.下面通过附图和具体实施例来进一步说明本实用新型。
19.最佳实施例:
20.参见附图1为本实施例所述的一种具有新型仿形装置的叶菜收获机,本实施例所述的一种叶菜收获机由叶菜收割部分与行走部分组成。
21.本实施例的行走部分如图2所示,所述叶菜收获机整体由设置在行走车架中部的两个驱动电机8驱动,所述驱动电机8通过链轮传动的方式以链条带动驱动轴6的齿轮驱动前轮5转动以提供整个叶菜收获机的动力;在驱动电机8的前段设有扭力限制器7作为保护装置,在机器出现故障时,它以滑动的方式限制传动系统传动,保护器械设备。在所述前轮一侧的内侧,设有转向器21,连接叶菜收获机的方向盘12,以控制整个机器转向,另外行走车架一侧设有转向连杆23。
22.本实施例的叶菜收割部分如图1所示,叶菜收割部分主要由割刀驱动部1、收割部输送台10以及仿形装置2组成。
23.所述割刀驱动部1为龙门结构,两侧设有驱动装置以驱动在框架内的带状刀片转动,进行叶菜收割作业。
24.所述收割输送台和行走部通过三点连接,分别是割台后部支点11和2个双向油缸,使用十字万向连接器作为连接割台后部支点11的连接器,左右使用弹簧33连接,连接上部支点横梁和行走车架;所述割台后部支点11是自由度为2的结构,可以让割台实现上升下降以及左右倾斜摆动两个方向的运动;所述双向油缸4左右各设一个,通过对两个油缸的控制,实现割台的上下和摇摆的控制。上部用万向节联轴器连接,只有左右摆动、割台抬高降低,限制了割台的左右转动。割台左右上部和车架之间用弹簧33连接,平衡割台在上升下降时左右油缸的受力不均匀,这个结构在仿形运动时,极大减少了割台内部应力的产生,对割台刚性要求的降低,同时可以轻量化割台。其次,此结构降低了仿形阻力,增加了仿形的灵敏度。
25.如图3、图4所示为本实施例的仿形装置3,由图可示,所述仿形装置3包括传感触脚31、平行机构32、电动调节推杆3、仿形装置可以通过电动调节推杆3调节收割时候的高度,仿形装置有左右两个传感触脚31,调整电动调节推杆3后并不会改变传感触脚的触地姿势。
当行走部分的倾斜影响到割台和畦面的平行时,一边的传感触脚31高度会发生变化,当设置在传感触脚末端的电磁感应传感器30感应到传感触脚 31高度变化时,将即时控制相应侧的油缸,即时调整割台和畦面的平行度。
26.如图5所示,整个仿形机构使用一个平行机构32,所述平行机构32的上部结构固定,高低调节通过平行机构32的下部来实现,左右传感触脚31和下部平行机构同步升降,左右传感触脚31有各自独立的电磁感应传感器30。
27.本实施例所述的叶菜收获机工作时整体由设置于行走车架后部的电瓶供电,所述电瓶放置于电瓶以及电器控制容纳箱14内,本实施例所述的叶菜收获机纯电力驱动,相比于拖拉机更环保、节能、噪音较少。操作者可通过控制台上的方向盘12与收割控制面板操作整个叶菜收获机的移动、收割。
28.以上所述,仅为本实用新型专利较佳的具体实施方式,但本实用新型专利的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型专利揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型专利的保护范围之内。
技术特征:
1.一种具有新型仿形装置的叶菜收获机,其特征在于:所述叶菜收获机包括叶菜收割部分和行走部分,所述叶菜收割部分包括割刀驱动部(1)、收割传输台(10)、仿形装置(2),所述仿形装置(2)设置于所述收割传输台(10)下方,所述割刀驱动部(1)设置于收割传输台(10)前端,所述仿形装置(2)包括两根传感触脚(31)、电磁感应传感器(30)、一个平行机构(32)及一根电动调节推杆(3),所述两根传感触脚(31)设置于所述平行机构(32)的下部,所述两根传感触脚末端连接所述电磁感应传感器(30),所述电动调节推杆(3)设置于平行机构(32)后部,以调节收割高度。2.根据权利要求1所述的一种具有新型仿形装置的叶菜收获机,其特征在于:所述行走部分包括行走车架、驱动电机(8)、驱动轴(6)、转向器(21)、扭力限制器(7)、差速变速箱(20)、电瓶、一对前轮(5)与一对后轮(9),所述驱动电机(8)设置于行走车架中部,其通过所述驱动轴(6)驱动前轮(5)转动,所述转向器(21)设置于前轮(5)内侧,以控制前轮(5)转向,扭力限制器(7)设置于驱动电机(8)前端,以预防电机过载。3.根据权利要求1所述的一种具有新型仿形装置的叶菜收获机,其特征在于:所述叶菜收获机还包括方向盘(12)、行走以及收割控制面板(13),所述行走以及收割控制面板(13)设置于行走车架中部,所述方向盘(12)设置于行走以及收割控制面板(13)上。
技术总结
本实用新型涉及一种具有新型仿形装置的叶菜收获机,包括叶菜收割部分和行走部分,所述叶菜收割部分包括割刀驱动部、收割传输台、仿形装置,所述仿形装置设置于所述收割传输台下方,所述割刀驱动部设置于收割传输台前端,所述仿形装置包括两根传感触脚、电磁感应传感器、一个平行机构及一根电动调节推杆,所述两根传感触脚设置于所述平行机构的下部,所述两根传感触脚末端连接所述电磁感应传感器,所述电动调节推杆设置于平行结构后部,以调节收割高度。本实用新型所提供的叶菜收割机收割高度调节时,仿形杆和地面的接触角度不变,方便调节。同时其仿形装置的平行机构只有一个,相对于现有技术更轻量化。于现有技术更轻量化。于现有技术更轻量化。
技术研发人员:黄春波 万之一
受保护的技术使用者:上海达汇农业机械设备有限公司
技术研发日:2021.01.02
技术公布日:2022/2/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1