用于自主装置的可选择性操作门的制作方法
示例性实施方式总体上涉及机器人车辆,并且更具体地,涉及一种选择性地操作以使得机器人车辆能够通过的门。
背景技术:
1、庭院维护任务通常使用各种工具和/或机器来执行,这些工具和/或机器配置为用于执行对应的特定任务。某些任务(例如割草)通常由草坪割草机执行。草坪割草机本身可能具有多种不同的构造以支持消费者的需求和预算。步行式草坪割草机通常是紧凑的、具有相对较小的发动机且价格相对低廉。同时,在另一极端的是乘骑式草坪割草机(诸如草坪拖拉机)可能相当大。最近,机器人割草机和/或遥控割草机也成为消费者考虑的选择。
2、机器人割草机通常局限于在由某种形式的边界所界定(例如,由线或其他方法限定)的地段上操作。机器人割草机能够检测到边界并且相对自主地在由边界限定的区域内操作。然而,在一些情况下,物理边界(例如,庭院中的围栏或其一部分)可能仅是机器人割草机意图在其中操作的操作区域的一部分。例如,虽然前院传统上未用围栏围住,但是后院确实可能用围栏围住。同时,可能希望机器人割草机在前院和后院二者内操作。在这种情况下或者在其他情况下,可能希望机器人割草机从一个区域通过到达另一个区域,而不会使安全性、隐私性或屏障(诸如墙壁或围栏)的完整性丧失。
技术实现思路
1、因此,一些示例性实施方式可以提供一种用于机器人车辆通过的可选择性操作门。该可选择性操作门可以包括:门框架,可布置在划分两个区域的屏障中,机器人车辆能够在这两个区域中行驶;门主体,铰接地连接到门框架;以及闩锁组件,构造成交替地允许门主体移动使得机器人车辆能够经由门主体的位移而通过可选择性操作门以及防止门主体移动使得门主体保持在关闭状态中。闩锁组件可以包括自动锁,该自动锁构造成限定释放位置和捕获位置,在释放位置中,允许门主体从关闭状态移动,在捕获位置中,允许门主体移动到关闭状态并且防止门主体从关闭状态移动。
技术特征:
1.一种用于机器人车辆通过的可选择性操作门,所述可选择性操作门包括:
2.根据权利要求1所述的可选择性操作门,其中,所述自动锁布置在所述门主体处,并且所述闩锁组件的螺栓从所述门框架朝向所述自动锁延伸。
3.根据权利要求2所述的可选择性操作门,其中,所述自动锁包括第一捕获元件和第二捕获元件,
4.根据权利要求3中所述的可选择性操作门,其中,所述第一捕获元件和所述第二捕获元件中的每者均包括位于其远端处的倾斜表面,所述倾斜表面成角度以彼此背离,并且
5.根据权利要求3所述的可选择性操作门,其中,所述第一捕获元件和所述第二捕获元件被朝向延伸位置偏压,并且
6.根据权利要求5所述的可选择性操作门,其中,所述承载组件包括保持井,所述保持井构造成与球构件接合以将所述自动锁保持在所述释放位置中,直到通过所述电机的操作返回到所述捕获位置。
7.根据权利要求1所述的可选择性操作门,其中,所述自动锁能操作地联接到电机,所述电机配置成响应于打开触发指令而操作所述自动锁到达所述释放位置以及响应于关闭触发指令而操作所述自动锁到达所述捕获位置。
8.根据权利要求7所述的可选择性操作门,其中,所述电机配置成响应于完成所述自动锁在所述释放位置与所述捕获位置之间转换的循环而关闭,
9.根据权利要求7所述的可选择性操作门,其中,所述电机和所述自动锁都布置在所述门主体内。
10.根据权利要求7所述的可选择性操作门,其中,经由从所述机器人车辆发送到位于所述门主体处的车辆检测器的信号使所述打开触发指令被无线地接收。
11.根据权利要求10所述的可选择性操作门,其中,所述信号在两个位置处被接收,在所述两个位置的接收之间存在时间差,并且
12.根据权利要求7所述的可选择性操作门,其中,基于指定所述机器人车辆相对于所述门主体的位置的位置信息使所述打开触发指令被无线地接收。
13.根据权利要求7所述的可选择性操作门,其中,基于读取与所述机器人车辆相关联的无线射频识别(rfid)标签使所述打开触发指令被无线地接收。
14.根据权利要求7所述的可选择性操作门,其中,基于位于所述门主体处的接收器读取由所述机器人车辆产生的磁性特征使所述打开触发指令被无线地接收。
15.根据权利要求7所述的可选择性操作门,其中,通过检测所述机器人车辆朝向所述门主体的移动的相机使所述打开触发指令被无线地接收。
16.根据权利要求7所述的可选择性操作门,其中,基于所述门主体的一部分与所述机器人车辆之间的物理相互作用使所述打开触发指令被接收。
17.根据权利要求16所述的可选择性操作门,其中,所述物理相互作用包括所述机器人车辆激活位于所述门主体处的开关。
18.根据权利要求16所述的可选择性操作门,其中,所述物理相互作用包括所述机器人车辆的导电部件通过与所述门主体接触而使所述门主体处的开路闭合。
19.根据权利要求1所述的可选择性操作门,其中,所述自动锁响应于所述门主体远离所述关闭状态移动至少一预定量而从所述释放位置转换到所述捕获位置。
20.根据权利要求19所述的可选择性操作门,还包括配置成检测所述门主体的移动的运动传感器。
21.根据权利要求20所述的可选择性操作门,其中,所述运动传感器包括配置成检测所述门从所述关闭状态移动至少三十度的加速度计。
22.一种用于使得机器人车辆能够在由屏障划分的两个区域之间通过的系统,所述系统包括:
23.根据权利要求22所述的系统,其中,所述机器人车辆包括内部通信系统,所述内部通信系统配置成跟随引导线到达所述可选择性操作门,并且
技术总结
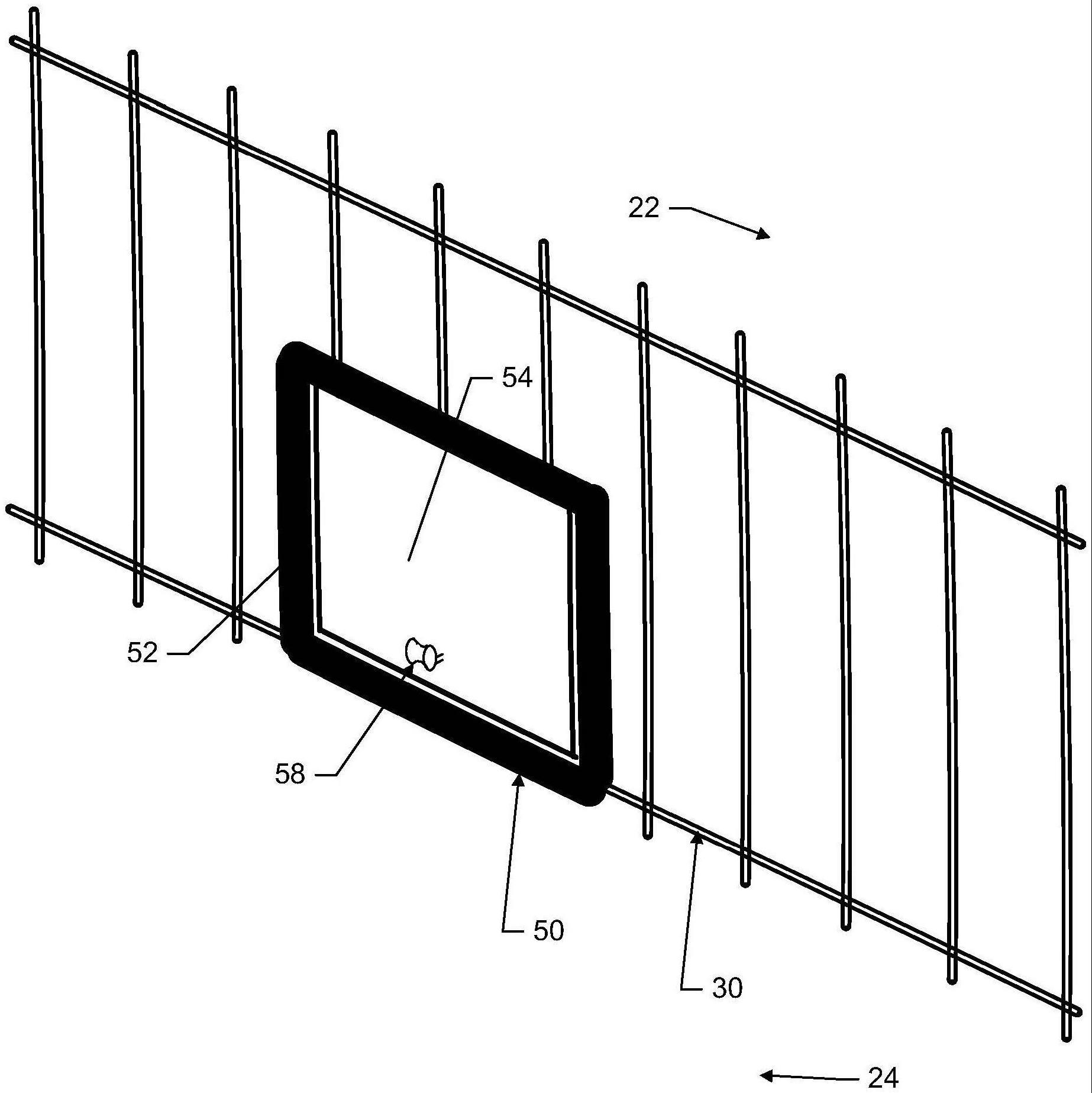
一种用于机器人车辆(10)的可选择性操作门(50)可以包括:门框架,可布置在划分两个区域的屏障中,机器人车辆(10)能够在这两个区域中行驶;门主体(54),铰接地连接到门框架(52);以及闩锁组件,构造成交替地允许门主体(54)移动以及防止门主体(54)移动,其中允许门主体使得机器人车辆(10)能够经由门主体(54)的位移而通过可选择性操作门(50),防止门主体(54)移动使得门主体(54)保持在关闭状态中。闩锁组件可以包括自动锁,该自动锁构造成限定释放位置和捕获位置,在释放位置中,允许门主体(54)从关闭状态移动,在捕获位置中,允许门主体移动到关闭状态并且防止门主体从关闭状态移动。
技术研发人员:阿尼·菲伊,克里斯·普赖斯,特伦特·库克,斯科特·柯克帕特里克,乔·拉兹,克里斯·罗特,查德·琼斯,罗伯特·施里弗
受保护的技术使用者:胡斯华纳有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!