农业机械、农作业支援装置、农作业支援系统的制作方法
本发明涉及一边在田地中行驶一边进行农作业的农业机械与支援该农作业的农作业支援装置以及农作业支援系统。
背景技术:
1、在专利文献1中公开了支援一边在田地中使农业机械通过自动驾驶而行驶、一边利用连结于该农业机械的作业装置来进行农作业的情况的技术。专利文献1所公开的农业机械具备取得部、作业设定部、材料余量检测部以及材料报告部。取得部取得田地的外周部的位置数据。作业设定部基于田地的外周部的位置数据设定农业机械在田地中行驶的作业行驶线、转弯路线、作业开始位置以及作业结束位置。材料余量检测部检测搭载于农业机械的材料的余量。材料报告部在材料的余量变少时向驾驶员报告应在埂间料补给材。在该报告后,农业机械接受驾驶员的开关操作或者自动地结束沿着此时所在的作业行驶线的行驶与作业束,然后移动到附近的埂间。
2、现有技术文献
3、专利文献
4、专利文献1:日本公开专利公报“日本特开2018-39号公报”
技术实现思路
1、发明将要解决的课题
2、在专利文献1的技术中,在农业机械基于自动驾驶的行驶作业中,在材料的余量变少的情况下,由材料报告部报告应补给材料。但是这之后,在示出农业机械向能够补给材料的埂间移动这一与作业时的行为不同的行为时,有观察该行为的用户误认为危险而使农业机械紧急停止的隐患。若如此使农业机械紧急停止,则材料的补给效率降低,农作业的作业效率也会降低。
3、因此,本发明鉴于上述问题,目的在于在农业机械中高效地进行材料的补给。
4、用于解决课题的手段
5、用于解决上述的技术课题的本发明的技术手段的特征在于以下所示的点。
6、本发明的一方式的农业机械具备:能够行驶的行驶车身;能够将用于进行农作业的作业装置连结于行驶车身的连结部;制作使行驶车身通过自动驾驶而行驶的行驶线路的线路制作部;补给设定部,其在偏离行驶线路的部位设定进行作业装置在农作业时使用的材料的补给的补给位置;检测行驶车身的位置的位置检测部;基于行驶车身的位置与行驶线路使行驶车身通过自动驾驶而行驶、且使行驶车身移动至补给位置的自动控制部;以及通知部,在自动控制部使行驶车身通过自动驾驶而行驶时,通知行驶车身朝向补给位置的情况。
7、另外,在本发明的一方式中,通知部在行驶车身朝向补给位置之前,以规定的间隔多次通知行驶车身朝向补给位置的情况。
8、另外,在本发明的一方式中,自动控制部执行基于行驶车身的位置与行驶线路而一边通过自动驾驶使行驶车身行驶一边利用作业装置进行农作业的自动行驶作业模式,在自动行驶作业模式的执行中,若行驶车身到达位于补给位置之前的行驶线路上的规定位置,则执行使行驶车身通过自动驾驶移动至补给位置的材料补给模式,通知部在自动行驶作业模式的执行中,基于行驶车身的位置与补给位置,通知行驶车身朝向补给位置的情况。
9、另外,在本发明的一方式中,通知部通知表示材料的余量的减少、补给位置、或者材料补给模式下的行驶车身或者作业装置的行为的信息。
10、另外,在本发明的一方式中,行驶线路中包含一边使行驶车身行驶一边利用作业装置进行农作业的多个作业线路与使行驶车身从作业线路的一方朝向另一方转弯的多个转弯线路,通知部在行驶车身基于朝向补给位置时之前的作业线路或者转弯线路而行驶时,通知行驶车身朝向补给位置的情况。
11、另外,在本发明的一方式中,具备余量运算部,该余量运算部基于投入到作业装置的材料的投入量与作业装置所进行的农作业中消耗的材料的消耗量,运算材料的余量,补给设定部预测因一边使行驶车身行驶一边利用作业装置进行农作业而导致材料的余量低于规定的阈值的降低位置,在将包含该降低位置的一方的作业线路向与行进方向相反的一侧延长了的线上设补给位置定,通知部在行驶车身在一方的作业线路之前行驶的其他作业线路上设定通知位置,在行驶车身通过该通知位置时,通知行驶车身朝向补给位置的情况。
12、另外,在本发明的一方式中,具备输入材料的投入量与材料的每单位面积的消耗量的输入部,在行驶车身基于自动驾驶的行驶前或者行驶中,余量运算部基于材料的投入量、材料的每单位面积的消耗量以及行驶车身与作业装置的状态运算材料的余量,补给设定部基于材料的余量设定补给位置,通知部基于补给位置设定通知位置。
13、另外,在本发明的一方式中,农业机械具备变更所述阈值的阈值变更部。
14、另外,在本发明的一方式中,农业机械具备将通知部的所述通知显示于画面的显示部。
15、另外,在本发明的一方式中,农业机械具备发出基于表示通知部的所述通知的声音或者光的警报的警报部。
16、本发明的一方式的农作业支援装置具有:制作使农业机械的行驶车身通过自动驾驶而行驶的行驶线路的线路制作部;补给设定部,在偏离行驶线路的部位设定进行连结于行驶车身的作业装置在农作业时使用的材料的补给的补给位置;以及通知部,基于由位置检测部检测出的行驶车身的位置与行驶线路,在农业机械使行驶车身通过自动驾驶而行驶时,通知行驶车身朝向补给位置的情况。
17、另外,农作业支援装置还具有运算补给设定部为了设定补给位置所需的材料的余量的余量运算部、输入余量运算部为了运算材料的余量所需的参数的输入部、及显示所述行驶线路、所述行驶车身的位置以及所述通知部的通知的显示部。
18、本发明的一方式的农作业支援系统包含:制作使农业机械的行驶车身通过自动驾驶而行驶的行驶线路的线路制作部;补给设定部,其在偏离行驶线路的部位设定进行连结于行驶车身的作业装置在农作业时使用的材料的补给的补给位置;检测行驶车身的位置的位置检测部;自动控制部,基于行驶车身的位置与所述行驶线路使行驶车身通过自动驾驶而行驶,且使行驶车身移动至所述补给位置;以及通知部,在自动控制部基于由位置检测部检测出的行驶车身的位置与行驶线路使行驶车身通过自动驾驶而行驶时,通知行驶车身朝向补给位置的情况。
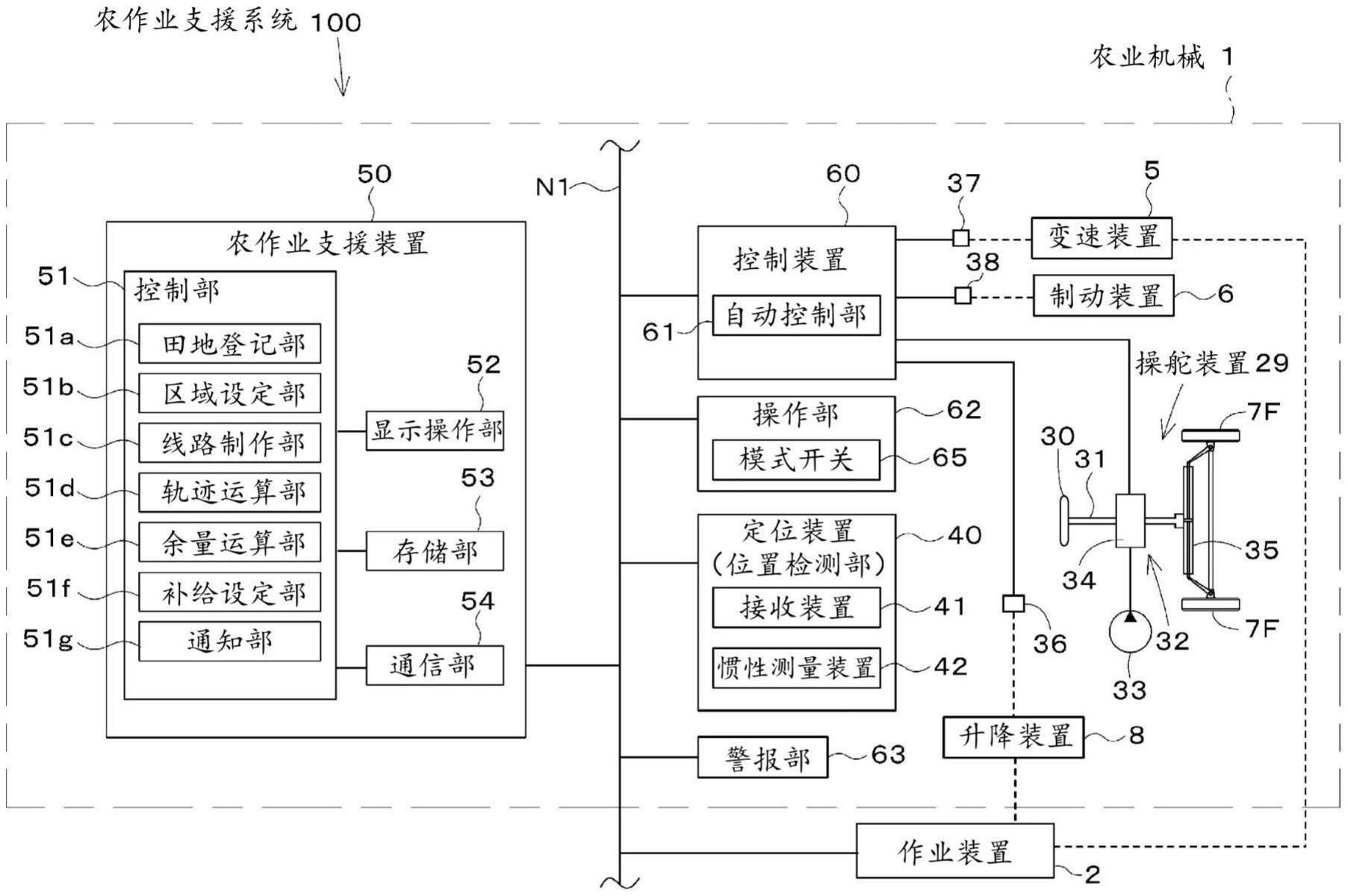
19、另外,在本发明的一方式中,农作业支援系统包含农业机械与搭载于农业机械的农作业支援装置,农业机械具备位置检测部与自动控制部,农作业支援装置具有线路制作部、补给设定部、通知部以及用于与自动控制部及位置检测部进行通信的通信部。
20、发明效果
21、根据本发明,能够在农业机械中高效地进行材料的补给。
技术特征:
1.一种农业机械,其特征在于,具备:
2.根据权利要求1所述的农业机械,其特征在于,
3.根据权利要求1或2所述的农业机械,其特征在于,
4.根据权利要求1至3中任一项所述的农业机械,其特征在于,
5.根据权利要求1至4中任一项所述的农业机械,其特征在于,
6.根据权利要求5所述的农业机械,其特征在于,
7.根据权利要求6所述的农业机械,其特征在于,
8.根据权利要求6或7所述的农业机械,其特征在于,
9.根据权利要求1至8中任一项所述的农业机械,其特征在于,
10.根据权利要求1至9中任一项所述的农业机械,其特征在于,
11.一种农作业支援装置,其特征在于,具有:
12.根据权利要求11所述的农作业支援装置,其特征在于,具有:
13.一种农作业支援系统,其特征在于,包含:
14.根据权利要求13所述的农作业支援系统,其特征在于,包含:
技术总结
农业机械(1)具备:能够行驶的行驶车身(3);能够将用于进行农作业的作业装置(2)连结于行驶车身(3)的连结部(8g、8h);制作使行驶车身(3)通过自动驾驶而行驶的行驶线路(L1)的线路制作部(51c);补给设定部(51f),其在偏离行驶线路(L1)的部位设定进行作业装置(2)在农作业时使用的材料的补给的补给位置(Pz);检测行驶车身(3)的位置的位置检测部(40);自动控制部(61),基于行驶车身(3)的位置与行驶线路(L1)使行驶车身(3)通过自动驾驶而行驶,且使行驶车身(3)移动至补给位置(Pz);以及在自动控制部(61)使行驶车身(3)通过自动驾驶而行驶时通知行驶车身(3)朝向补给位置(Pz)的情况的通知部(51g)。
技术研发人员:小山悠,大仓康平,菊地良太,吉村史也
受保护的技术使用者:株式会社久保田
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!