一种线控往复摆臂机构及其应用的制作方法
本发明涉及一种机械摆臂装置,特别是涉及一种线控往复摆臂机构及其应用。
背景技术:
1、高压输电线路在日常维护的过程中,通常需要对输电线路附近的树枝进行修剪,现有的树枝修建通常是通过带有锯子的机器人修剪,在修剪的过程中通过摆臂装置控制锯子完成输电线路两侧的修剪。
2、现有的摆臂装置通常包括拉线、卷筒和摆臂轴,通过拉线拉动卷筒直接带动摆臂装置的摆臂轴旋转,这种摆臂装置只能进行单向的摆动,无法实现摆臂往复摆动。
3、另一种摆臂装置上在卷筒上加装扭簧,扭簧提供了回复扭矩,使摆臂装置能够往复摆动,但是摆臂无法自锁,无法稳定在某一个位置工作,必须持续提供恒定拉力才能使摆臂固定在某一位置,操作难度高。
4、综上所述,摆臂旋转与卷筒旋转一直是同步的,而拉线只能使卷筒单向旋转,不能提供推力使其反转,要使其反向回复就必须设置回复力矩,比如用弹簧、扭簧、气缸、重物块等,但利用回复力矩来使摆臂反转,无法实现自锁。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明的目的在于提供一种线控往复摆臂机构,解决现有技术摆臂装置无法往复和自锁的问题。
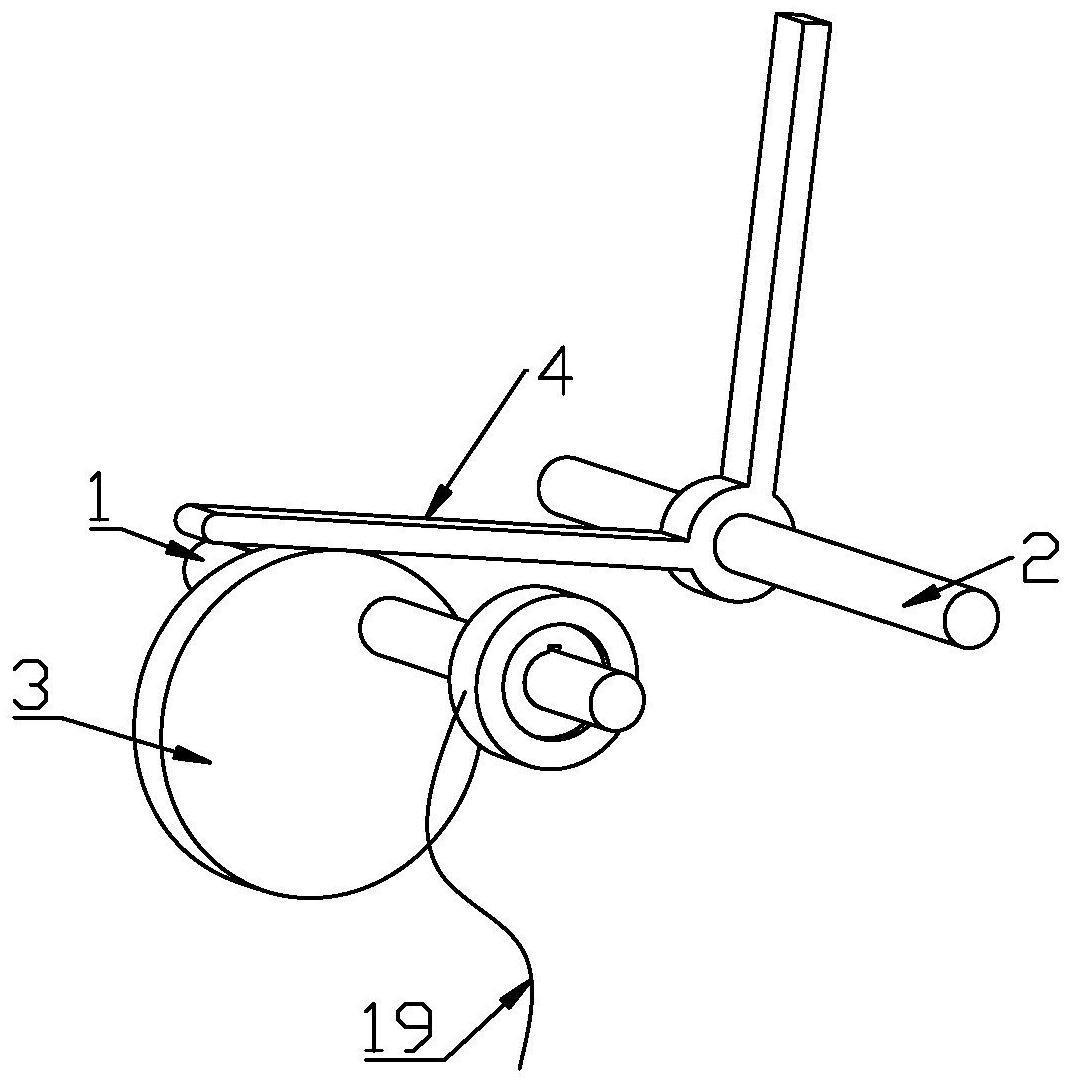
2、为实现上述目的及其他相关目的,本发明提供一种线控往复摆臂机构,所述线控往复摆臂机构包括第一轮轴、第二轮轴、凸轮、摆臂和提拉组件,所述提拉组件与所述第一轮轴驱动连接,所述凸轮固定连接至所述第一轮轴的中部,所述摆臂的一端固定连接在所述第二轮轴、另一端直线延伸,所述摆臂与所述凸轮抵触连接,所述第一轮轴上设有单向转动件和回复旋转元件,所述单向转动件和所述回复旋转元件沿第一转动方向相对锁定、并沿第二转动方向相对转动;所述单向转动件驱动连接至所述第一轮轴,所述回复旋转元件套设在所述第一轮轴外侧。
3、通过上述技术方案,使用时,提拉组件为回复旋转元件或单向转动件提供驱动力,从而带动第一轮轴转动,第一轮轴带动凸轮旋转,凸轮顶推摆臂沿第二轮轴转动;提拉组件放松时,回复旋转元件在保守力的作用下顺时针旋转,单向转动件此时无法带动第一轮轴旋转,凸轮会在摩擦力的作用下自锁,摆臂维持在当前位置;提拉组件反复驱动,凸轮就会不断单向旋转,将摆臂顶起并放落,周而复始。
4、于本发明的一实施例中,所述单向转动件优选为单向齿轮,所述回复元转件固定在所述第一轮轴上,所述单向转动件套设在所述回复元转件的外侧,所述单向转动件与所述提拉组件驱动连接。
5、于本发明的一实施例中,所述提拉组件包括第一拉线、齿条和弹簧,所述齿条的上端连接至弹簧的底端、一端连接所述第一拉线,所述齿条与所述单向转动件外侧的轮齿啮合。
6、通过上述技术方案,提供了一种具体的提拉组件,第一拉线拉动齿条从而带动单向齿轮转动,进而带动回复旋转元件带动,第一轮轴随之转动,完成摆臂动作,当第一拉线放松时,齿条在弹簧弹性的作用下回弹,单向齿轮的内外圈相对转动,回复旋转元件和第一轮轴不转动,实现自锁。
7、于本发明的一实施例中,所述单向转动件优选为单向轴承,所述单向转动件设置在所述回复旋转元件内圈,所述单向转动件的两端分别连接所述回复旋转元件和所述第一轮轴,所述回复旋转元件与所述提拉组件驱动连接。
8、于本发明的一实施例中,所述提拉组件包括定子磁铁、磁块和第二拉线,所述磁块设有两个、两个磁块分别固定在所述回复旋转元件的上下两端,所述定子磁铁同样设有两个、两个定子磁铁分别设置在两个所述磁块远离回复旋转元件一侧,所述定子磁铁与相邻磁块之间设有间隙,所述第二拉线连接至所述回复旋转元件。
9、更进一步的,两个所述定子磁铁靠近所述回复旋转元件一侧的极性相反,两个所述磁块远离所述回复旋转元件一侧的极性相反,所述定子磁铁与其相邻的所述磁块得到极性相反。
10、通过上述技术方案,提供了第二种具体的提拉组件,回复旋转元件在第二拉线的作用下转动带动第一轮轴转动,进而带动凸轮转动实现摆臂摆动,当第二拉线放松时,回复旋转元件在磁力的作用下回到原位置,此时单向轴承的内外圈相对转动,第一轮轴不转动,实现自锁。
11、于本发明的一实施例中,所述提拉组件包括扭簧、扭簧固定装置和第三拉线,所述扭簧套设在所述第一轮轴上且所述扭簧与所述回复旋转元件弹性连接,所述扭簧固定装置作用于所述扭簧,所述第三拉线连接至所述回复旋转元件。
12、通过上述技术方案,提供了第三种具体的提拉组件,第三拉线拉动回复旋转元件转动,实现摆臂摆动,当第三拉线放松时,回复旋转元件在扭簧的弹性作用下回位,此时单向轴承的内外圈相对转动,第一轮轴不转动,实现自锁。
13、于本发明的一实施例中,所述提拉组件包括第四拉线、第五拉线和重力块,所述第四拉线和第五拉线分别连接至所述回复旋转元件的相对两侧,所述第五拉线的底端连接所述重力块。
14、通过上述技术方案,提供了第四种具体的提拉组件,第四拉线带动回复旋转元件转动,实现摆臂摆动,当第四拉线放松时,回复旋转元件在在第五拉线底端重力块的重力作用下回转,此时单向轴承的内外圈相对转动,第一轮轴不转动,实现自锁。
15、此外,本申请还公开了一种线控往复摆臂机构的应用,所述线控往复摆臂机构可应用于高压线路作业的树枝修建机器人中。
16、如上所述,本发明的线控往复摆臂机构及其应用,具有以下有益效果:
17、本发明可以通过持续不断地反复拉动拉线来实现摆臂的往复运动,并具备自锁功能。
18、相比通过回复力矩来使卷筒回复旋转位置的往复摆臂装置,本发明具备自锁功能,可以在松开手的情况下,维持摆臂位置,而不需要持续拉着拉线。
技术特征:
1.一种线控往复摆臂机构,其特征在于,所述线控往复摆臂机构包括第一轮轴(1)、第二轮轴(2)、凸轮(3)、摆臂(4)和提拉组件(19),所述提拉组件(19)与所述第一轮轴(1)驱动连接,所述凸轮(3)固定连接至所述第一轮轴(1)的中部,所述摆臂(4)的一端固定连接在所述第二轮轴(2)、另一端直线延伸,所述摆臂(4)与所述凸轮(3)抵触连接,所述第一轮轴(1)上设有单向转动件(5)和回复旋转元件(6),所述单向转动件(5)和所述回复旋转元件(6)沿第一转动方向相对锁定、并沿第二转动方向相对转动;所述单向转动件(5)驱动连接至所述第一轮轴(1),所述回复旋转元件(6)套设在所述第一轮轴(1)外侧。
2.根据权利要求1所述的线控往复摆臂机构,其特征在于:所述单向转动件(5)单向齿轮,所述回复元转件固定在所述第一轮轴(1)上,所述单向转动件(5)套设在所述回复元转件的外侧,所述单向转动件(5)与所述提拉组件(19)驱动连接。
3.根据权利要求2所述的线控往复摆臂机构,其特征在于:所述提拉组件(19)包括第一拉线(7)、齿条(8)和弹簧(9),所述齿条(8)的上端连接至弹簧(9)的底端、一端连接所述第一拉线(7),所述齿条(8)与所述单向转动件(5)外侧的轮齿啮合。
4.根据权利要求1所述的线控往复摆臂机构,其特征在于:所述单向转动件(5)单向轴承,所述单向转动件(5)设置在所述回复旋转元件(6)内圈,所述单向转动件(5)的两端分别连接所述回复旋转元件(6)和所述第一轮轴(1),所述回复旋转元件(6)与所述提拉组件(19)驱动连接。
5.根据权利要求4所述的线控往复摆臂机构,其特征在于:所述提拉组件(19)包括定子磁铁(12)、磁块(11)和第二拉线(10),所述磁块(11)设有两个、两个磁块(11)分别固定在所述回复旋转元件(6)的上下两端,所述定子磁铁(12)同样设有两个、两个定子磁铁(12)分别设置在两个所述磁块(11)远离回复旋转元件(6)一侧,所述定子磁铁(12)与相邻磁块(11)之间设有间隙,所述第二拉线(10)连接至所述回复旋转元件(6)。
6.根据权利要求5所述的线控往复摆臂机构,其特征在于:两个所述定子磁铁(12)靠近所述回复旋转元件(6)一侧的极性相反,两个所述磁块(11)远离所述回复旋转元件(6)一侧的极性相反,所述定子磁铁(12)与其相邻的所述磁块(11)得到极性相反。
7.根据权利要求4所述的线控往复摆臂机构,其特征在于:所述提拉组件(19)包括扭簧(13)、扭簧固定器(13)和第三拉线(15),所述扭簧(13)套设在所述第一轮轴(1)上且所述扭簧(13)与所述回复旋转元件(6)弹性连接,所述扭簧固定器(13)作用于所述扭簧(13),所述第三拉线(15)连接至所述回复旋转元件(6)。
8.根据权利要求4所述的线控往复摆臂机构,其特征在于:所述提拉组件(19)包括第四拉线(16)、第五拉线(17)和重力块(18),所述第四拉线(16)和第五拉线(17)分别连接至所述回复旋转元件(6)的相对两侧,所述第五拉线(17)的底端连接所述重力块(18)。
9.一种如权利要求1-8中任一项所述的线控往复摆臂机构在高压线路作业树枝修剪机器人中的应用。
技术总结
本发明提供一种线控往复摆臂机构及其应用,属于机械摆臂领域,所述线控往复摆臂机构包括第一轮轴、第二轮轴、凸轮、摆臂和提拉组件,所述提拉组件与所述第一轮轴驱动连接,所述凸轮固定连接至所述第一轮轴的中部,所述摆臂的一端固定连接在所述第二轮轴、另一端直线延伸,所述第一轮轴上设有单向转动件和回复旋转元件,所述单向转动件驱动连接至所述第一轮轴,所述回复旋转元件套设在所述第一轮轴外侧;通过上述技术方案,用一根拉线控制摆臂旋转,每拉动并释放一次拉线,可使摆臂朝一个方向旋转,转到极限位置后,再拉动拉线将反向旋转,持续多次拉动拉线,可使摆臂往返运动。
技术研发人员:翁立平,田佳槟,张益新
受保护的技术使用者:杭州赛维动力科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!