除草机器人的制作方法
本发明实施例涉及割草设备,特别是涉及一种除草机器人。
背景技术:
1、随着科技的进步,对草坪的护理愈来愈依靠割草设备来完成。
2、割草设备一般包括割草机器人和打草机,割草机器人为一种智能化庭院护理设备,可自动按照规划的路径进行大面积割草操作,而打草机具有打草头,能够发挥一般的打草和修边功能。
3、现有的草坪护理过程中,一般是先通过除草机器人进行割草,在距草坪边界总有一定宽度无法切割覆盖区域,需要经人工更换打草机进行打边操作,使用装备过多,造成使用不便。
技术实现思路
1、本发明实施例提供一种除草机器人,无需使用多个设备即可实现打边及割草操作。
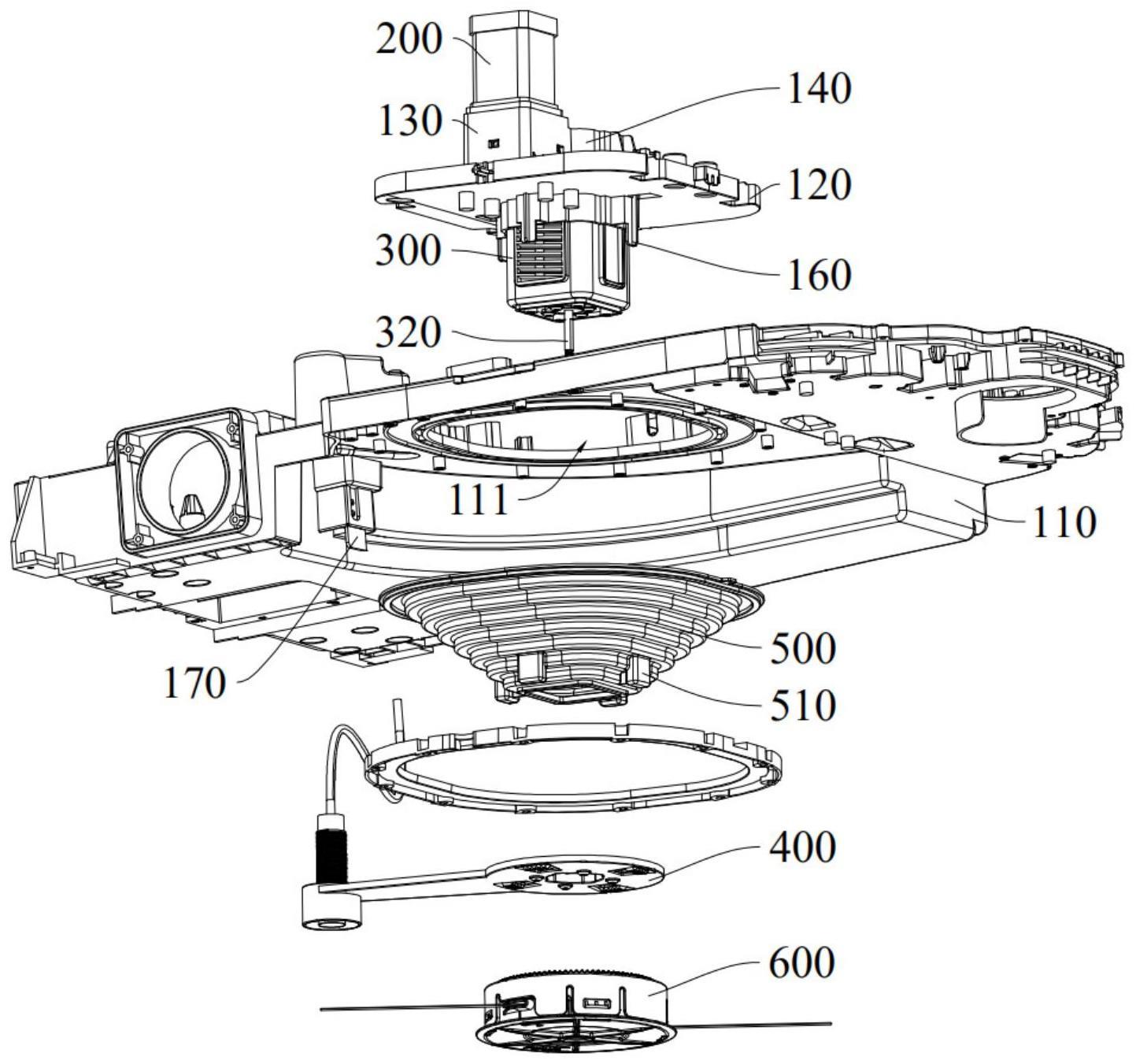
2、为解决上述技术问题,本发明采用的一个技术方案是:提供一种除草机器人,包括:
3、本体,包括底盘和触发件,所述底盘上设有第一通孔,所述触发件设置于所述底盘上;
4、第一驱动机构,设置于所述底盘上背离所述触发件的一侧;
5、第二驱动机构,与所述第一驱动机构传动连接并经由所述第一通孔穿经所述底盘,并且能在所述第一驱动机构驱动下相对于所述底盘在第一位置和第二位置往复运动;以及
6、打草机构,可拆卸地连接于所述第二驱动机构的输出轴上;
7、当所述第二驱动机构处于所述第一位置时,所述打草机构与所述触发件抵接,所述打草机构在所述第二驱动机构的驱动下处于转动放绳状态,当所述第二驱动机构处于所述第二位置时,所述打草机构与所述触发件分离,所述打草机构在所述第二驱动机构的驱动下处于转动打草状态。
8、在一实施例中,所述除草机器人包括固定架机构,所述固定架机构上设置有触发片,所述固定架机构设置于所述第二驱动机构靠近所述输出轴一侧的端面上,所述固定架机构和所述打草机构依次设置,所述触发件用于在所述第二驱动机构处于所述第一位置时挤压所述触发片,以使所述触发片朝向所述打草机构凸出并与所述打草机构抵接。
9、在一实施例中,所述打草机构包括外壳和绕线盘,所述绕线盘转动地设置于所述外壳内,所述第二驱动机构的输出轴与所述绕线盘连接,所述输出轴配置为具有第一转动方向和第二转动方向,当所述触发片与所述外壳抵接且所述输出轴沿所述第二转动方向转动时,所述绕线盘在所述外壳内转动;当所述触发片与所述外壳分离且所述输出轴沿所述第一转动方向转动时,所述外壳与所述绕线盘共同转动,其中,所述第一转动方向与所述第二转动方向相反。
10、在一实施例中,所述固定架机构包括安装板,所述安装板设有第二通孔,所述触发片部分连接所述第二通孔的侧壁。
11、在一实施例中,所述打草机构还包括弹性件,所述外壳的内侧设有凸起部,所述绕线盘上设有与所述凸起部配合连接的凹陷部,所述弹性件用于使所述凸起部与所述凹陷部在所述输出轴的轴线方向上保持抵接,所述凸起部和所述凹陷部均沿所述输出轴的第二转动方向设置,在所述第二转动方向上,所述凸起部逐渐增厚,所述凹陷部逐渐加深。
12、在一实施例中,所述除草机器人还包括密封机构,所述密封机构上设有触发套,所述触发套凸设于所述密封机构上,所述密封机构盖设于所述第一通孔,所述密封机构与所述第二驱动机构连接,所述触发套用于收容所述触发件并挤压所述触发片。
13、在一实施例中,所述触发片上设有定位齿条,所述打草机构上设有定位齿圈,所述定位齿条用于与所述定位齿圈啮合。
14、在一实施例中,所述底盘上设置有基板、安装座、管体以及位置检测传感器,所述安装座和所述管体间隔设置于所述基板上,所述管体贯穿所述基板,所述触发件设于所述管体远离所述第一驱动机构的一侧,所述第一驱动机构设置于所述安装座上,所述第二驱动机构设置于所述管体内,所述位置检测传感器用于检测所述第二驱动机构的位置。
15、在一实施例中,述管体朝向所述安装座的一侧设有连接窗口,所述第一驱动机构上设有蜗杆,所述第二驱动机构的侧壁上设有斜齿,所述蜗杆通过所述连接窗口与所述斜齿啮合。
16、在一实施例中,所述第一位置与所述第二位置之间还具有第三位置,所述底盘上还设置有刀片,所述刀片与所述输出轴之间具有预定间距,当所述第二驱动机构处于所述第三位置时,所述打草机构内的打草绳的长度超出所述预定间距时,所述刀片用于切断所述打草绳。
17、本发明实施例的有益效果是:区别于现有技术的情况,本发明实施例的除草机器人通过第一驱动机构控制第二驱动机构的位置,使触发件与打草机构连接或脱离连接,从而对设置于第二驱动机构上的打草机构进行控制,使打草机构进行放绳操作或者打草操作,进而在打草完成以后将打草机构从第二驱动机构的输出轴上拆卸下来,再将割草刀安装于上述输出轴上,即可实现割草操作,无需使用多个设备即可实现打边及割草操作。
技术特征:
1.一种除草机器人,其特征在于,包括:
2.根据权利要求1所述的除草机器人,其特征在于,所述除草机器人包括固定架机构,所述固定架机构上设置有触发片,所述固定架机构设置于所述第二驱动机构靠近所述输出轴一侧的端面上,所述固定架机构和所述打草机构依次设置,所述触发件用于在所述第二驱动机构处于所述第一位置时挤压所述触发片,以使所述触发片朝向所述打草机构凸出并与所述打草机构抵接。
3.根据权利要求2所述的除草机器人,其特征在于,所述打草机构包括外壳和绕线盘,所述绕线盘转动地设置于所述外壳内,所述第二驱动机构的输出轴与所述绕线盘连接,所述输出轴配置为具有第一转动方向和第二转动方向,当所述触发片与所述外壳抵接且所述输出轴沿所述第二转动方向转动时,所述绕线盘在所述外壳内转动;当所述触发片与所述外壳分离且所述输出轴沿所述第一转动方向转动时,所述外壳与所述绕线盘共同转动,其中,所述第一转动方向与所述第二转动方向相反。
4.根据权利要求2所述的除草机器人,其特征在于,所述固定架机构包括安装板,所述安装板设有第二通孔,所述触发片部分连接所述第二通孔的侧壁。
5.根据权利要求3所述的除草机器人,其特征在于,所述打草机构还包括弹性件,所述外壳的内侧设有凸起部,所述绕线盘上设有与所述凸起部配合连接的凹陷部,所述弹性件用于使所述凸起部与所述凹陷部在所述输出轴的轴线方向上保持抵接,所述凸起部和所述凹陷部均沿所述输出轴的第二转动方向设置,在所述第二转动方向上,所述凸起部逐渐增厚,所述凹陷部逐渐加深。
6.根据权利要求2所述的除草机器人,其特征在于,所述除草机器人还包括密封机构,所述密封机构上设有触发套,所述触发套凸设于所述密封机构上,所述密封机构盖设于所述第一通孔,所述密封机构与所述第二驱动机构连接,所述触发套用于收容所述触发件并挤压所述触发片。
7.根据权利要求3所述的除草机器人,其特征在于,所述触发片上设有定位齿条,所述打草机构上设有定位齿圈,所述定位齿条用于与所述定位齿圈啮合。
8.根据权利要求1所述的除草机器人,其特征在于,所述底盘上设置有基板、安装座、管体以及位置检测传感器,所述安装座和所述管体间隔设置于所述基板上,所述管体贯穿所述基板,所述触发件设于所述管体远离所述第一驱动机构的一侧,所述第一驱动机构设置于所述安装座上,所述第二驱动机构设置于所述管体内,所述位置检测传感器用于检测所述第二驱动机构的位置。
9.根据权利要求8所述的除草机器人,其特征在于,所述管体朝向所述安装座的一侧设有连接窗口,所述第一驱动机构上设有蜗杆,所述第二驱动机构的侧壁上设有斜齿,所述蜗杆通过所述连接窗口与所述斜齿啮合。
10.根据权利要求1所述的除草机器人,其特征在于,所述第一位置与所述第二位置之间还具有第三位置,所述底盘上还设置有刀片,所述刀片与所述输出轴之间具有预定间距,当所述第二驱动机构处于所述第三位置时,所述打草机构内的打草绳的长度超出所述预定间距时,所述刀片用于切断所述打草绳。
技术总结
本发明实施例提供一种除草机器人,包括本体、第一驱动机构、第二驱动机构以及打草机构。本发明实施例的除草机器人通过第一驱动机构控制第二驱动机构的位置,使触发件与打草机构连接或脱离连接,从而对设置于第二驱动机构上的打草机构进行控制,使打草机构进行放绳操作或者打草操作,进而在打草完成以后将打草机构从第二驱动机构的输出轴上拆卸下来,再将割草刀安装于上述输出轴上,即可实现割草操作,无需使用多个设备即可实现打边及割草操作。
技术研发人员:彭小明,刘汉军,陈斌
受保护的技术使用者:深圳华芯信息技术股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!