一种西兰花采摘机器人
本发明涉及一种西兰花采摘机器人。
背景技术:
1、近些年西兰花因其丰富的营养价值和清鲜的口感备受人们喜爱,随着对西兰花需求的增加,西兰花产业不断扩大。国内外对西兰花的需求也在不断发生着变化,国内西兰花产业以出口为主,我国成为西兰花的主要供应国。
2、但是,随着人工费用的增加,人工采摘面临着成本高、效率低等一系列问题。造成种植成本不断攀升。因此设计一款能够实现高效率,完全自主的西兰花采摘整机迫在眉睫。
技术实现思路
1、本发明的目的是:针对人工采摘成本高、效率低发明设计可以实现完全自主的西兰花采摘整机,在保证采摘质量的前提下实现高效率采摘。
2、为实现上述目的,本发明采用如下技术方案:
3、本发明公开了一种西兰花采摘机器人,装置包括移动底盘、采摘机械臂、采摘机械爪、双目相机、激光雷达。移动底盘用于整机的移动。采摘机械臂用于西兰花的采摘。采摘机械爪用于西兰花的采摘与转运。双目相机用于视觉识别,激光雷达用于构建地图。通过ros操作系统的控制可以实现完全自主的西兰花采摘。降低人工成本,大大提高工作效率。
4、优选的,一种西兰花采摘机器人,其特征在于:移动底盘、采摘机械臂、采摘机械爪、双目相机、激光雷达。移动底盘在驱动电机的作用下带动整机移动。采摘机械臂在上位机的控制下执行采摘任务并将采摘下的西兰花放置到收集车厢内。采摘机械爪用于西兰花的采摘与转运。双目相机用于视觉识别,判断西兰花是否符合采摘要求,激光雷达用于构建地图,为导航、避障提供地图。
5、优选的,所述移动底盘,其特征在于:所述的移动底盘包括:收集车厢,驱动电机,履带轮三角履带。传动电机通过连接装置安装收集车厢内部,三角履带安装与移动底盘两侧的履带轮上。移动底盘在驱动电机的带动下移动至待采摘西兰花处。
6、优选的,前述的采摘机械臂,其特征在于:所述的采摘机械臂与移动底盘相连接,各关节在驱动电机的带动下转动至相应的位姿。
7、优选的,前述的采摘机械爪,其特征在于:所述的采摘机械爪包括:电机、滚珠丝杠、连接架、夹爪、切割刀具、压力传感器、托架。电机与滚珠丝杠安装在连接架上,电机用于驱动滚珠丝杠的转动,通过滚珠丝杠的转动带动托架往复运动,从而带动夹爪的开闭。夹爪安装于连接架上,用于西兰花的抓取。切割刀具安装与夹爪末端,用于西兰花根茎的切割。压力传感器安装与夹爪的内侧,用于收集采摘时的压力值,评测西兰花破损程度。
8、优选的,前述的双目相机,其特征在于:所述的双目相机:双目相机采用的是zed2,用于西兰花的目标检测,及深度信息反馈。用于采摘机械臂的运动规划使得采摘机械爪到达采摘位置。
9、优选的,前述的激光雷达,其特征在于:激光雷达与控制板相连接,用于环境的地图构建,用于整机的路径规划、导航、避障。
10、上述装置的具体实施步骤为:
11、1)通过yolov5深度学习算法对西兰花数据集进行训练学习;
12、2)激光雷达通过gmapping功能包进行实时的定位与地图构建;
13、3)移动底盘在ros系统的控制下按照move_base路径规划的轨迹进行移动移动底盘在ros系统的控制下按照move_base路径规划的轨迹进行移动;
14、4)移动底盘移动至待采摘西兰花处,通过双目相机对西兰花进行识别与定位,通过识别判断该西兰花是否已经成熟,是否达到采摘标准。同时双目相机对该西兰花进行定位及深度测量,得到西兰花相对于深度相机、机械臂、移动底盘的位姿信息;
15、5)机械臂处于初始位姿;
16、6)通过moveit!对西兰花位姿进行解算,规划处机械臂的移动轨迹。上位机将轨迹信息发送至下位机,通过采摘夹爪带动切割道具对西兰花完成采摘;
17、7)将切割下的西兰花转运至收集车厢储存;
18、8)机械臂回到初始位姿;
19、9)移动底盘移动至下一工作点。
20、与现有技术相比,本发明有以下技术效果:
21、(1)本发明解决了西兰花采摘低效率、高成本的问题,实现完全自主的对西兰花完成采摘工作。
技术特征:
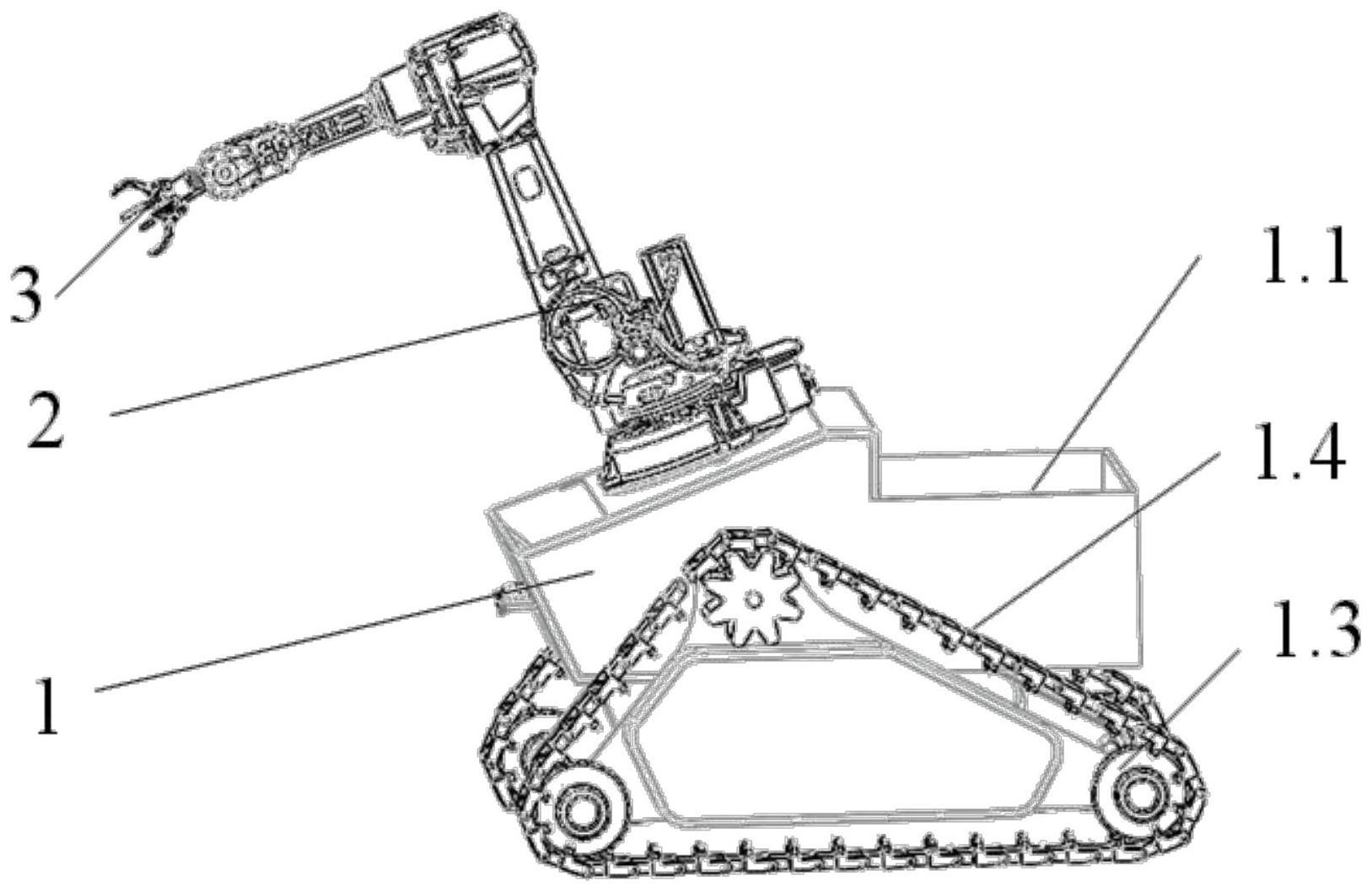
1.一种西兰花采摘机器人,其特征在于:包括移动底盘(1),所述移动底盘(1)以收集车厢(1.1)为主体,所述收集车厢(1.1)前端设置有梯形安装平台(1.5),所述安装平台(1.5)设置有安装凸台1(1.6)和矩形安装凹槽2(1.7),所述安装凸台1(1.6)设置为圆形用以安装激光雷达(5),所述安装凹槽2(1.7)用以安装双目相机(4),所述收集车厢(1.1)前端设置有倾斜安装平台(1.8),所述安装平台(1.8)上设置有圆形安装凸台(1.9),所述圆形安装凸台(1.9)设置有3个均匀分布的安装螺栓孔,所述圆形安装凸台(1.9)右侧设置有圆形通孔(1.10),所述通孔(1.10)与收集车厢(1.1)内部机器人总体控制盒(1.10)相连接用以机器人内部控制与外部硬件通信,所述机器人总体控制盒(1.10)通过矩形挡板(1.11)将收集车厢(1.1)内部分成控制盒和西兰花存储盒(1.12),所述安装平台(1.8)下部设置有倾斜式矩形缺口(1.12),采摘机械臂(2)将采摘到的西兰花通过矩形缺口(1.12)传送到收集车厢(1.1),所述矩形缺口(1.12)内部设置为两边低中间高的倾斜式,便于西兰花滑行到收集车厢(1.1)内部,所述收集车厢(1.1)内部安装有两个分布在左右两侧的驱动电机(1.2),所述驱动电机(1.2)通过电机支架(1.13)安装固定,所述电机支架(1.13)底部通过焊接与收集车厢(1.1)相固定,所述传动电机(1.2)传动轴一端安装有传动齿轮(1.14),所述传动齿轮(1.14)同侧安装有两个履带传动轮(1.3),3者之间呈现三角形,所述履带传动轮(1.13)安装在收集车厢(1.1)一侧的车架(1.15)上,所述履带传动轮(1.13)上安装有履带(1.4),所述履带(1.4)总体呈现为三角形。
2.根据权力要求1所述的一种西兰花采摘机器人,其特征在于:所述收集车厢(1.1)上安装有6自由度的采摘机械臂(2),所述采摘机械臂(2)关节一与圆形安装凸台(1.9)通过预留3个定位安装孔相互固定,所述采摘机械臂(2)末端与采摘机械爪(3)固定安装。
3.根据权力要求2所述的一种西兰花采摘机器人,其特征在于:所述的采摘机械爪(3)设置有矩形后盖(3.1),所述矩形后盖(3.1)通过两侧电机挡板(3.2)与电机支架(3.3)相连接,所述电机支架(3.3)中间安装有电机(3.4),所述电机(3.4)前端设置有滚珠丝杠(3.5),所述滚珠丝杠(3.5)与连接架(3.6)垂直连接,所述连接架(3.6)设置为矩形,每个边设置有与夹爪(3.7)铰接的接口,所述夹爪(3.7)内侧设置有圆形安装台(3.8),所述圆形安装台用以安装压力传感器(3.9),所述夹爪(3.7)前端设置有菱形切割刀具(3.10),两者固定连接,所述切割刀具(3.10)在相对的两个夹爪(3.7)上采用两个长边相连的形式固定,在另外两边采用单菱形式排布方式。
4.根据权力要求1所述的一种西兰花采摘机器人,其特征在于:所述收集车厢(1.1)采用距离地面90厘米的固定高度形式,所述收集车厢(1.1)设置宽度横跨在3列西兰花种植垄上进行采摘,所述履带(1.4)宽度设置符合西兰花种植农艺要求。
5.根据权利要求1所述的双目相机,其特征在于:所述的双目相机(4):双目相机(4)采用的是zed2,用于西兰花的目标检测,及深度信息反馈。用于采摘机械臂(2)的运动规划使得采摘机械爪(3)到达采摘位置。根据权利要求一所述的双目相机,其特征在于:所述的双目相机(4):双目相机(4)采用的是zed2,用于西兰花的目标检测,及深度信息反馈。用于采摘机械臂(2)的运动规划使得采摘机械爪(3)到达采摘位置。
技术总结
本申请属于农业机械领域,公开了一种西兰花采摘机器人,包括移动底盘、采摘机械臂、采摘装置和视觉导航系统,移动底盘包括机架和履带式行走装置,机架依据西兰花生长和种植特点设计,横跨在多垄西兰花上进行采摘作业,视觉导航系统主要包括双目相机和激光雷达安装在机器人前端,采摘机械臂带动采摘装置对空间位置的西兰花进行采摘,机械臂每动作一次,完成一次采摘,机械臂将采摘到的西兰花放置到机架中,进行转运和存储,本发明大大提高了西兰花采摘效率,降低了人工成本。
技术研发人员:吴雪峰,李明,夏纪准
受保护的技术使用者:哈尔滨理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!