一种多爪联动蔬菜苗移栽机取苗装置
1.本实用新型涉及农业机械领域,特别涉及一种多爪联动蔬菜苗移栽机取苗装置。
背景技术:
2.育苗移栽指将在苗圃、温床或温室里培育幼苗,待其生长至一定苗龄时,移植至土地中栽种。育苗移栽技术不仅可以调控植物和蔬菜的生长状况,也能产生良好的经济效益和社会效益。目前,大多数蔬菜移栽过程仍以人工作业为主,不仅耗费工时多,移栽效率低,而且劳动强度很大。蔬菜移栽是密集型农业生产活动,移栽过程中消耗的劳动成本很高,因此蔬菜苗移栽机械化是减轻劳动者负担,提高生产效益、保证工作质量的关键。移栽机的取苗投苗装置更是移栽机中十分重要的一环,取苗投苗的精确度与速度直接影响整个移栽机的移栽效率和移栽质量。
3.马晓晓等(马晓晓,李华,曹卫彬,余思遥,李树峰.番茄钵苗移栽机自动取苗装置作业参数优化与试验[j].农业工程学报,2020,36(10):46-55.)设计了一种番茄钵苗自动取苗装置的夹苗器,以适栽期番茄钵苗为试验对象,利用自动取苗试验台进行单因素试验。然后结合理论分析及单因素试验,得到理论最优参数组合并取得了较低的伤苗、漏苗效果以及较高的取苗成功率,但整个自动取苗的过程较为繁琐、取苗时间较长,当用于自动移栽机整机的移栽过程中会大大地增加移栽时间。
[0004]
现有的蔬菜苗移栽机的取苗装置存在几方面不足:1、移栽机取苗机构取苗成功率低;2、多株秧苗共同取苗的移栽机的取苗破损率较高、结构复杂、工作稳定性差、成本高昂。
技术实现要素:
[0005]
本实用新型目的在于克服上述蔬菜苗移栽机取苗装置的不足,提出一种多爪联动蔬菜苗移栽机取苗装置,本实用新型结构简单、体积小、生产成本低,具有较好的取苗效果。
[0006]
本实用新型是通过以下技术方案实现的。
[0007]
一种多爪联动蔬菜苗移栽机取苗装置,包括取苗爪、齿条、导轨、舵机、控制器,舵机与控制器直接连接,舵机输出轴通过联器齿轮与取苗爪上的齿轮固定;齿条与每个取苗爪上的全齿轮连接配合,齿条安装在导轨上并可沿导轨滑动。
[0008]
优选地,所述多个取苗爪等间距固定在基座上,根据蔬菜苗穴盘的尺寸合理地设计其间距,保证取苗的精确性。
[0009]
优选地,齿条与取苗爪上的全齿轮形成配合,全齿轮与不完全齿轮配合,保证多个取苗爪取苗的协同一致。
[0010]
优选地,所述多个取苗爪的全齿轮和齿条配合,实现一个舵机驱动多个取苗爪同步联动取苗的工作,显著提高取苗效率。
[0011]
总体而言,通过本实用新型所构思的以上技术方案与现有技术相比,主要具备以下优点。
[0012]
本实用新型通过将舵机的旋转运动转变为多个取苗爪的同时夹取、释放动作,实
现多株蔬菜苗共同取苗、投苗;通过控制器控制一个舵机工作,继而控制多个取苗爪同时动作,实现取苗、投苗的自动化,显著提高取苗效率;且结构简单、体积小、生产成本低。
附图说明
[0013]
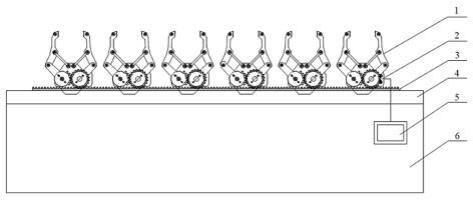
图1为本实用新型多爪联动蔬菜苗移栽机取苗装置结构示意图。
[0014]
图2为图1中取苗爪的结构示意图。
[0015]
图3为图1中取苗爪联动装置结构示意图。
[0016]
图中:1、取苗爪;101、不完全齿轮;102、连杆;103、爪指;104、爪臂;105、全齿轮;2、舵机;3、齿条;4、导轨;5、控制器;6、基座。
具体实施方式
[0017]
下面通过实施例对本实用新型详细说明,所述实施例是说明性的,而非限制性的,不能一次限定本实用新型的保护范围。
[0018]
一种多爪联动蔬菜苗移栽机取苗装置,包括取苗爪1、舵机2、齿条3、导轨4、控制器5、基座6。
[0019]
如图2所示,取苗爪1包括不完全齿轮101、连杆102、爪指103、爪臂104以及全齿轮105,其中不完全齿轮101与全齿轮105配合且齿数满足整个取苗爪的开合要求,最右侧取苗爪的全齿轮105由舵机2驱动,其余取苗爪由齿条3带动转动,不完全齿轮101由全齿轮105带动转动,通过连杆102、爪臂104和齿轮组的连接实现各取苗爪爪指103的张合,完成对穴盘上蔬菜苗的夹取和释放。
[0020]
如图1~3所示,控制器5通过脉冲控制舵机2的转动,舵机2通过联轴齿轮和整个多爪联动蔬菜苗移栽机取苗装置的一个取苗爪的全齿轮105固定,全齿轮105和舵机2的输出轴实现同步旋转并带动此爪的不完全齿轮101和齿条3的运动,齿条3在导轨4上的滑动带动其他取苗爪的全齿轮105的转动进而带动不完全齿轮101的转动,带动各爪指103的张合实现多个取苗爪的联动夹取和释放。
[0021]
所述多个取苗爪等间距固定在基座上,根据蔬菜苗穴盘的尺寸合理地设计其间距。
[0022]
所述舵机2的输出轴齿轮与联轴齿轮配合,联轴齿轮与全齿轮105通过螺钉固定,实现全齿轮105与舵机2的同步运动。
[0023]
本实施例中,将多爪联动蔬菜苗移栽机取苗装置用于全自动蔬菜苗移栽机中,根据使用的实际使用情况,控制器5系统对控制需求进行设置,对舵机输入的脉冲信息进行调整,实现蔬菜苗移栽机自动化移栽工作。
[0024]
以上所述仅是对本实用新型的优选实施方案,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,上述假设的这些改进和变型也应视为本实用新型的保护内容。
技术特征:
1.一种多爪联动蔬菜苗移栽机取苗装置,其特征在于:包括取苗爪、齿条、导轨、舵机、控制器,其中:取苗爪包括爪指、爪臂、连杆、齿轮组,其中每个取苗爪的齿轮组均由一个全齿轮和不完全齿轮组成,全齿轮通过联轴齿轮和舵机的输出轴固定,作为取苗爪的驱动齿轮;全齿轮和不完全齿轮分别通过连杆与爪臂连接,实现取苗爪的夹取、释放工作;舵机由控制器控制转动,精确实现取苗的夹取和释放;齿条安装在导轨上且与每个取苗爪的全齿轮配合,工作时齿条可沿导轨滑动。2.根据权利要求1所述的一种多爪联动蔬菜苗移栽机取苗装置,其特征在于:所述多个取苗爪等间距固定在基座上,根据蔬菜苗穴盘的尺寸合理地设计其间距,保证取苗的精确性。3.根据权利要求1所述的一种多爪联动蔬菜苗移栽机取苗装置,其特征在于:所述多个取苗爪的全齿轮和齿条配合,实现一个舵机驱动多个取苗爪,同步联动取苗的工作,显著提高取苗效率。4.根据权利要求1所述的一种多爪联动蔬菜苗移栽机取苗装置,其特征在于:齿条安装在导轨上,可以沿着导轨纵向平移,通过齿条平移带动取苗爪上齿轮转动。5.根据权利要求1所述的一种多爪联动蔬菜苗移栽机取苗装置,其特征在于:所述多爪联动取苗装置中,只需一个舵机给其中一个苗爪齿轮提供动力带动齿轮转动,进而使齿条产生平移,再带动其余苗爪上齿轮旋转,实现多爪开启、闭合。
技术总结
本实用新型公开了一种多爪联动蔬菜苗移栽机取苗装置,包括取苗爪、齿条、导轨、舵机、控制器、基座,舵机与控制器直接连接,其输出轴通过联轴齿轮与取苗爪上的齿轮固定,使取苗爪上的齿轮与舵机的输出轴做同步运动;齿条与每个取苗爪上的全齿轮连接配合,齿条安装在导轨上并可沿导轨滑动。本实用新型专利经过齿条和取苗爪上的齿轮的连接,实现多爪联动的工作,使用时通过控制器控制一个舵机的转动,带动齿条平移,再带动其余苗爪齿轮转动,多个取苗爪实现夹取、释放多株蔬菜苗的目的。该装置结构简单、效率高,适用于蔬菜苗移栽机取苗、投苗工作。作。作。
技术研发人员:侯俊才 王慧园 胡晓辉 刘旭 陈维民 王庆华
受保护的技术使用者:西北农林科技大学
技术研发日:2022.01.14
技术公布日:2022/7/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1