一种植树机器人土壤夯实结构
1.本实用新型属于植树机器人领域,具体涉及一种植树机器人土壤夯实结构。
背景技术:
2.随着智能移动机器人技术的发展,越来越多的植树机器人应用于植树造林。在植树造林过程中,通常需要对种植后的土壤进行夯实。目前,现有的土壤夯实结构通常采用电机驱动滚筒进行压实,可该结构存在以下的缺点:1.需要电机驱动进行工作,存在能源消耗;2.结构复杂,且不易安装;3.存在电路及控制模块,价格昂贵。
技术实现要素:
3.本实用新型的目的在于提供一种植树机器人土壤夯实结构,该土壤夯实结构无需电机驱动就能实现土壤的夯实,能源消耗低,结构简单,价格便宜。
4.本实用新型所采用的技术方案是:
5.一种植树机器人土壤夯实结构,其包括至少两组压土轮组和一根连接杆;
6.所述压土轮组包括两组对称设置的夯土轮、固定机构、拉簧机构;每个夯土轮分别通过固定机构与连接杆连接,使每个夯土轮与对称轴呈一定夹角;每个夯土轮对应一个拉簧机构,且拉簧机构的一端与固定机构连接,另一端与连接杆连接,拉簧机构使夯土轮紧贴土壤实现土壤夯实。
7.按上述方案,所述夯土轮与对称轴的夹角为25-35
°
,以便更好的实现夯土。
8.按上述方案,所述固定机构包括对称设置的2个固定单元和与固定单元连接的轮子光轴;
9.所述固定单元包括从外到内依次连接的固定侧板、支撑打印件、支撑光轴座;所述固定侧板与连接杆连接。
10.按上述方案,所述支撑打印件的竖截面为直角梯形,直角梯形的直腰与固定侧板连接,直角梯形的斜腰与支撑光轴座连接,以便于使夯土轮与对称轴呈一定夹角,达到更好的夯土效果。
11.按上述方案,在直角梯形的斜腰上,靠近下底边处被切去一角,形成一个竖直边;采用竖直边,以便于确保两个支撑打印件的平行度,以便更好的控制夯土轮的倾斜角度。
12.按上述方案,所述固定侧板上设有轴承,光轴的一端与压土轮组光轴座连接,另一端依次穿过压土轮组的固定侧板上的轴承后,与另一个压土轮组光轴座连接;两个压土轮组光轴座与连接杆连接;结构简单,安装方便。
13.按上述方案,所述轮子光轴与水平面呈25-35
°
夹角,以便于使夯土轮与对称轴呈一定夹角,达到更好的夯土效果。
14.按上述方案,所述支撑打印件交错安装,以便轮子光轴与水平面呈一定夹角,以便能更稳定的完成夯土工作。
15.按上述方案,所述拉簧机构包括张紧拉簧和拉簧固定件,所述张紧拉簧的一端固
定在固定机构的固定侧板上,另一端通过拉簧固定件与连接杆连接;通过设置张紧拉簧和拉簧固定件,使得夯土轮能始终贴紧土壤,起到夯土作用。
16.本实用新型的有益效果在于:
17.通过设置对称的夯土轮,从而实现一个种植点土壤的夯实,结构非常简单;
18.仅通过对称的夯土轮实现土壤的夯实,无需设置电机驱动,能源消耗低;
19.采用少量非标件(支撑打印件),制作成本低,便于推广应用;
20.采用特殊结构是支撑打印件,从而使压土轮组的两个夯土轮呈一定夹角,从而更好的实现夯土;
21.采用拉簧使夯土轮紧贴土壤,从而实现良好的夯土效果;
22.通过设置多个压土轮组,从而实现多个种植点的土壤夯实,大大提高了植树效率;
23.连接杆为一根型材,支撑以及固定起整个结构;
24.本实用新型采用的器件均无电路,因此价格便宜;
25.压土轮组的夯土轮始终与土地接触,呈相切状态,具有良好的夯土效果;
26.本实用新型采用中心对称结构布置,平稳工作。
附图说明
27.下面将结合附图及实施例对本实用新型作进一步说明,附图中:
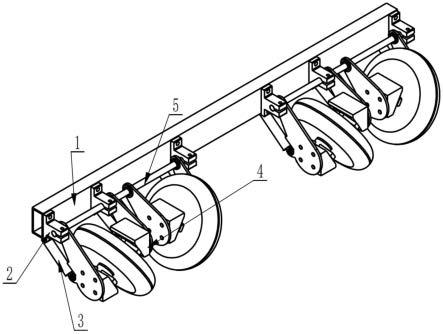
28.图1是植树机器人土壤夯实结构的结构示意图;
29.图2是植树机器人土壤夯实结构的另一个视角的结构示意图;
30.图3是夯土轮单元的结构示意图;
31.图4是夯土轮单元(无夯土轮)的结构示意图;
32.图5是支撑打印件的结构示意图;
33.图中:1、连接杆;2、压土轮组光轴座;3、张紧拉簧;4、夯土轮单元;4.1、支撑打印件;4.2、固定侧板;4.3、轮子光轴;4.4、夯土轮;4.5、支撑光轴座;4.6、轴承;5、光轴;6、拉簧固定件。
具体实施方式
34.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
35.参见图1-图5,一种植树机器人土壤夯实结构,用于与其他植树机器人结构配合(可在种植机器人车体后悬挂本土壤夯实结构),在无能耗的条件下完成土壤夯实,其包括两组压土轮组和一根连接杆1,当然,可根据需要多设置几组压土轮组,以便能同时多压实几个种植点。
36.压土轮组包括两组对称设置的夯土轮单元4。该夯土轮单元4包括夯土轮4.4、固定机构、拉簧机构。每个夯土轮4.4分别通过固定机构与连接杆1连接,使每个夯土轮4.4与对称轴呈30
°
夹角;每个夯土轮4.4对应一个拉簧机构。
37.固定机构包括对称设置的2个固定单元和8mm的轮子光轴4.3。固定单元包括从外到内依次连接的固定侧板4.2、支撑打印件4.1、支撑光轴座4.5,轮子光轴4.3分别与固定单
元的支撑光轴座4.5连接。固定侧板4.2上设有轴承4.6;光轴5的一端与压土轮组光轴座2连接,另一端依次穿过压土轮组的固定侧板4.2上的轴承4.6后,与另一个压土轮组光轴座2连接;两个压土轮组光轴座2与连接杆1连接。
38.本实施例中,支撑打印件4.1的竖截面为直角梯形,直角梯形的直腰通过螺栓螺母与固定侧板4.2连接,直角梯形的斜腰通过螺栓与支撑光轴座4.5连接。在直角梯形的斜腰上,靠近下底边处被切去一角,形成一个竖直边;采用竖直边,以便于确保两个支撑打印件的平行度,以便更好的控制夯土轮4.4的倾斜角度,从而稳定的完成夯土工作。
39.本实施例中,支撑打印件4.1交错安装(一个支撑打印件4.1的竖直边在上部,一个支撑打印件4.1的竖直边在下部),以便使轮子光轴4.3与水平面呈30
°
夹角。
40.本实施例中,拉簧机构包括张紧拉簧3和拉簧固定件6,张紧拉簧3的一端固定在固定机构的固定侧板4.2上,另一端与拉簧固定件6连接,拉簧固定件6通过螺栓和梯形螺母与连接杆1连接。通过张紧拉簧3以及拉簧固定件6张紧,使得夯土轮4.4能始终贴紧土地,起到夯土作用。
41.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
技术特征:
1.一种植树机器人土壤夯实结构,其特征在于:包括至少两组压土轮组和一根连接杆;所述压土轮组包括两组对称设置的夯土轮、固定机构、拉簧机构;每个夯土轮分别通过固定机构与连接杆连接,使每个夯土轮与对称轴呈一定夹角;每个夯土轮对应一个拉簧机构,且拉簧机构的一端与固定机构连接,另一端与连接杆连接,拉簧机构使夯土轮紧贴土壤实现土壤夯实。2.根据权利要求1所述的植树机器人土壤夯实结构,其特征在于:所述夯土轮与对称轴的夹角为25-35
°
。3.根据权利要求1所述的植树机器人土壤夯实结构,其特征在于:所述固定机构包括对称设置的2个固定单元和与固定单元连接的轮子光轴;所述固定单元包括从外到内依次连接的固定侧板、支撑打印件、支撑光轴座;所述固定侧板与连接杆连接。4.根据权利要求3所述的植树机器人土壤夯实结构,其特征在于:所述支撑打印件的竖截面为直角梯形,直角梯形的直腰与固定侧板连接,直角梯形的斜腰与支撑光轴座连接。5.根据权利要求4所述的植树机器人土壤夯实结构,其特征在于:在直角梯形的斜腰上,靠近下底边处被切去一角,形成一个竖直边。6.根据权利要求4所述的植树机器人土壤夯实结构,其特征在于:所述支撑打印件交错安装。7.根据权利要求3所述的植树机器人土壤夯实结构,其特征在于:所述固定侧板上设有轴承,光轴的一端与压土轮组光轴座连接,另一端依次穿过压土轮组的固定侧板上的轴承后,与另一个压土轮组光轴座连接;两个压土轮组光轴座与连接杆连接。8.根据权利要求3所述的植树机器人土壤夯实结构,其特征在于:所述轮子光轴与水平面呈25-35
°
夹角。9.根据权利要求1所述的植树机器人土壤夯实结构,其特征在于:所述拉簧机构包括张紧拉簧和拉簧固定件,所述张紧拉簧的一端固定在固定机构的固定侧板上,另一端通过拉簧固定件与连接杆连接。
技术总结
本实用新型公开了一种植树机器人土壤夯实结构,其包括至少两组压土轮组和一根连接杆;所述压土轮组包括两组对称设置的夯土轮、固定机构、拉簧机构;每个夯土轮分别通过固定机构与连接杆连接,使每个夯土轮与对称轴呈一定夹角;每个夯土轮对应一个拉簧机构,且拉簧机构的一端与固定机构连接,另一端与连接杆连接,拉簧机构使夯土轮紧贴土壤实现土壤夯实。本实用新型无需电机驱动就能实现土壤的夯实,能源消耗低,结构简单,价格便宜。价格便宜。价格便宜。
技术研发人员:周耀胜 张皓然 杨森 陈绪兵
受保护的技术使用者:武汉工程大学
技术研发日:2022.08.30
技术公布日:2023/3/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1