一种可转动定位宠物喂食器的制作方法
本技术涉及宠物用品,尤其涉及一种可转动定位宠物喂食器。
背景技术:
1、宠物喂食器指用于容纳宠物食物以供宠物进食的装置,一般至少包括喂食碗。目前市场上常见的宠物喂食器有两种,一种为简易喂食器,碗口永久敞开式,宠物随时都可以用餐,用户不能掌握宠物的用食量且食用容易变质;另外一种为自动喂食器,宠物可以定时定量用餐,但是对食物的有要求,仅能适用于湿度低的干粮或者冻干,且碗内食物没有吃完就一直敞开,碗内食物易变质。
2、针对上述问题现有技术中也有相应改进,如公开日为2019-4-23,公开号为cn208768699u的中国专利申请公开了一种宠物喂食器,包括喂食器壳体、喂食碗、保鲜罩、单片机信息处理模块和红外线感应器,喂食碗设置在喂食器壳体中,红外线感应器设置在喂食器壳体的前端,保鲜罩罩设在喂食碗上,保鲜罩可开合的设置在喂食器壳体上,红外线感应器、单片机信息处理模块相连接;红外线感应器用于探测宠物或者人体的接近,并将信号传递至单片机信息处理模块,单片机信息处理模块控制保鲜罩打开或关闭,本实用新型能够对宠物食物进行保鲜,保证宠物的食欲,更加节约粮食。该方案的不足之处在于:单个喂食碗以及对应控制开合的保鲜罩使得该宠物喂食器无法区分放置不同类型食物以及无法区分开闭对应类型食物。
3、又如公开日为2010-6-2,公开号为cn201491588u的中国专利申请公开了一种宠物自动喂食器,其特征是:该宠物自动喂食器包括底盘(1)和转盖(8),底盘(1)的中心是电动盒(2),电动盒(2)和底盘(1)外壁之间沿圆周方向均匀分割成多个食物格(3);所述电动盒(2)包括电机(4)、电池盒(5)和控制器(6),底盘(1)的外壁设有三个定时键(7),其中控制器(6)为一个单片机最小系统,三个定时键(7)与控制器(6)的输入接口相连,控制器(6)的输出接口与电机(4)相连;转盖(8)的中心开有与电机(4)转轴配套的套孔(9),同时转盖(8)上还开有一个与食物格(3)垂直、形状大小相同的喂食窗(10)。本实用新型实用性强,自动给宠物喂食,还能预先置好每餐不同的食物量,按宠物身体状况设定供餐间隔时间,可有效保护宠物健康成长。虽然该方案实现了放置以及开闭不同类型食物,但该方案的不足之处在于:需要空出一个食物格,空间浪费且造成整体放置食物量减少,同时,转盘转动过程中无法定位其位置,存在风险,例如存在夹伤宠物的风险,尤其是转动状态下的喂食窗与食物格的侧壁之间。
4、因此,针对上述问题,有必要提出进一步地解决方案,以至少解决其中一个问题。
技术实现思路
1、为了解决相关的存在无法定位碗盖转动位置的问题,本实用新型提供一种可转动定位宠物喂食器。所述技术方案是:
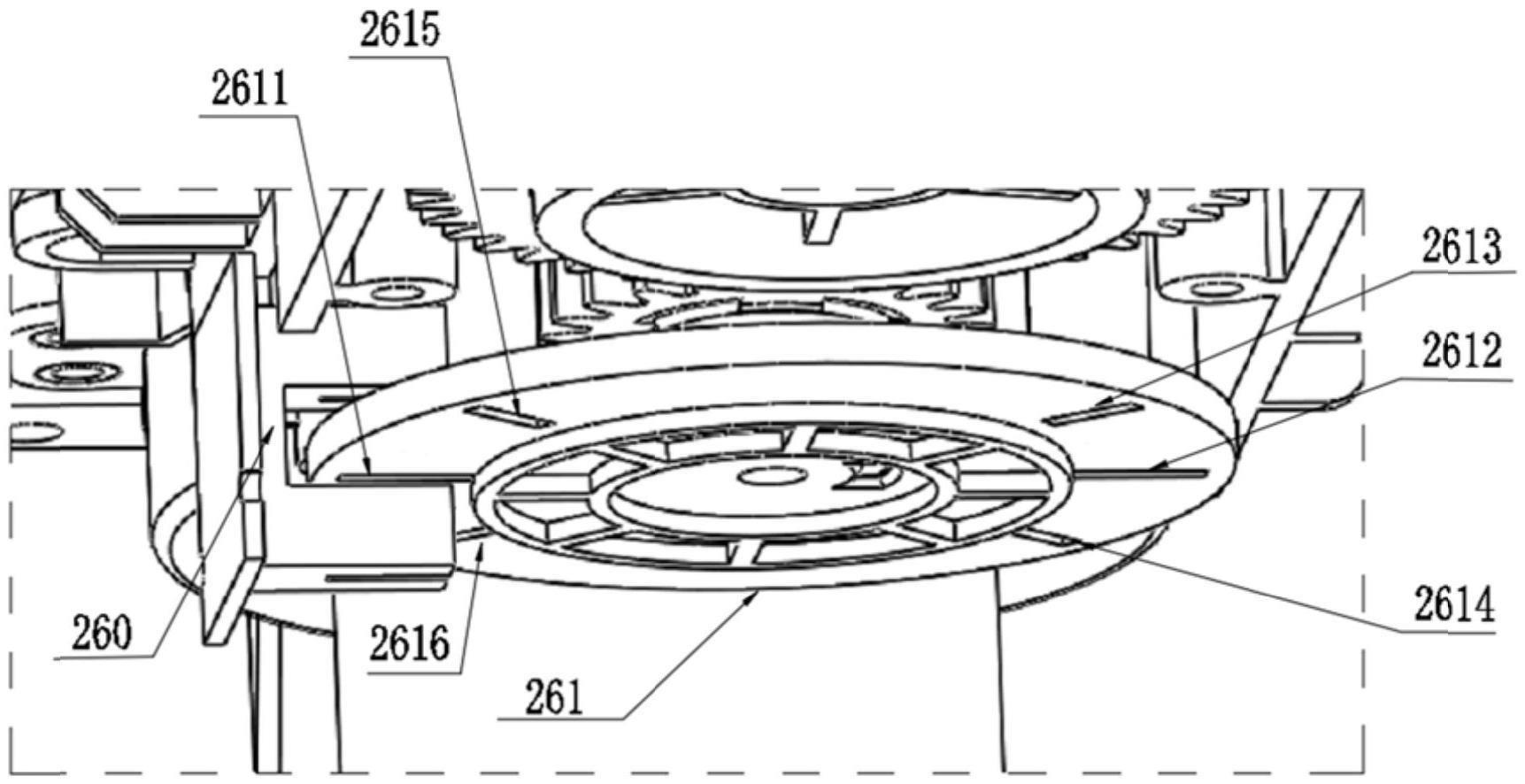
2、一种可转动定位宠物喂食器,包括底座和设置于所述底座上的主壳体,所述主壳体上设置有喂食碗,所述喂食碗的上方层叠设置有活动碗盖及固定碗盖,所述活动碗盖连接有驱动机构以绕所述喂食碗的中心线且相对所述固定碗盖水平转动,还包括光栅传感器,所述光栅传感器包括传感器主体和与所述活动碗盖同步转动的格栅盘,所述格栅盘上对应所述活动碗盖关闭路径的两端分别开设有第一通光孔和第二通光孔,且所述格栅盘上还开设有位于所述活动碗盖关闭路径中的第三通光孔。
3、优选地,所述驱动机构包括电机,所述电机的输出轴连接有转动杆,所述转动杆连接所述活动碗盖,所述光栅传感器靠近所述转动杆设置,且所述格栅盘与所述转动杆同轴连接。
4、优选地,当所述活动碗盖沿关闭路径转动时,所述第一通光孔、第三通光孔和第二通光孔依次位于所述传感器主体的检测位置,且所述第三通光孔和第二通光孔之间的夹角为锐角。
5、优选地,所述第三通光孔和第二通光孔之间的夹角为30°-50°。
6、优选地,所述第一通光孔和第二通光孔的前方均设置有减速通光孔。
7、优选地,位于所述活动碗盖关闭路径中的的所述减速通光孔与所述第三通光孔重合。
8、优选地,所述驱动机构包括驱动控制器和与其连接的电机。
9、优选地,所述电机为变速电机。
10、优选地,所述喂食碗包括镜像设置的第一容纳槽和第二容纳槽,所述活动碗盖及固定碗盖均与所述第一容纳槽/第二容纳槽相适配。
11、优选地,所述驱动机构还连接所述喂食碗以驱动其绕自身中心线且相对所述活动碗盖水平转动,所述活动碗盖和所述喂食碗的转速比为2:1。
12、与现有技术相比,本实用新型的有益效果是:
13、本实用新型通过在喂食碗的上方层叠设置活动碗盖及固定碗盖,活动碗盖连接有驱动机构以绕喂食碗的中心线且相对固定碗盖水平转动,实现开闭喂食碗,且通过设置光栅传感器确定活动碗盖相对固定碗盖的方位,实现对可转动的活动碗盖的定位,进而为驱动机构的控制提供参考,尤其是设置在活动碗盖关闭路径中的第三通光孔,能够定位到活动碗盖即将关闭前的位置,从而可采用但不限于使得活动碗盖在驱动机构下带动下暂停一时间段后再启动或减速转动,进而可避免夹伤宠物。
技术特征:
1.一种可转动定位宠物喂食器,包括底座和设置于所述底座上的主壳体,所述主壳体上设置有喂食碗,其特征在于,所述喂食碗的上方层叠设置有活动碗盖及固定碗盖,所述活动碗盖连接有驱动机构以绕所述喂食碗的中心线且相对所述固定碗盖水平转动,还包括光栅传感器,所述光栅传感器包括传感器主体和与所述活动碗盖同步转动的格栅盘,所述格栅盘上对应所述活动碗盖关闭路径的两端分别开设有第一通光孔和第二通光孔,且所述格栅盘上还开设有位于所述活动碗盖关闭路径中的第三通光孔。
2.根据权利要求1所述的可转动定位宠物喂食器,其特征在于,所述驱动机构包括电机,所述电机的输出轴连接有转动杆,所述转动杆连接所述活动碗盖,所述光栅传感器靠近所述转动杆设置,且所述格栅盘与所述转动杆同轴连接。
3.根据权利要求1所述的可转动定位宠物喂食器,其特征在于,当所述活动碗盖沿关闭路径转动时,所述第一通光孔、第三通光孔和第二通光孔依次位于所述传感器主体的检测位置,且所述第三通光孔和第二通光孔之间的夹角为锐角。
4.根据权利要求3所述的可转动定位宠物喂食器,其特征在于,所述第三通光孔和第二通光孔之间的夹角为30°-50°。
5.根据权利要求1所述的可转动定位宠物喂食器,其特征在于,所述第一通光孔和第二通光孔的前方均设置有减速通光孔。
6.根据权利要求5所述的可转动定位宠物喂食器,其特征在于,位于所述活动碗盖关闭路径中的所述减速通光孔与所述第三通光孔重合。
7.根据权利要求1所述的可转动定位宠物喂食器,其特征在于,所述驱动机构包括驱动控制器和与其连接的电机。
8.根据权利要求7所述的可转动定位宠物喂食器,其特征在于,所述电机为变速电机。
9.根据权利要求1所述的可转动定位宠物喂食器,其特征在于,所述喂食碗包括镜像设置的第一容纳槽和第二容纳槽,所述活动碗盖及固定碗盖均与所述第一容纳槽/第二容纳槽相适配。
10.根据权利要求9所述的可转动定位宠物喂食器,其特征在于,所述驱动机构还连接所述喂食碗以驱动其绕自身中心线且相对所述活动碗盖水平转动,所述活动碗盖和所述喂食碗的转速比为2:1。
技术总结
本技术公开了一种可转动定位宠物喂食器,属于宠物用品技术领域。针对存在无法定位碗盖转动位置的问题,本技术包括底座和设置于底座上的主壳体,主壳体上设置有喂食碗,喂食碗的上方层叠设置有活动碗盖及固定碗盖,活动碗盖连接有驱动机构以绕喂食碗的中心线且相对固定碗盖水平转动,还包括光栅传感器,光栅传感器包括传感器主体和与活动碗盖同步转动的格栅盘,格栅盘上对应活动碗盖关闭路径的两端分别开设有第一通光孔和第二通光孔,且格栅盘上还开设有位于活动碗盖关闭路径中的第三通光孔。本技术通过设置光栅传感器确定活动碗盖相对固定碗盖的方位,实现对可转动的活动碗盖的定位。
技术研发人员:黄斐,肖汉志
受保护的技术使用者:上海联宠智能科技有限公司
技术研发日:20221130
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!