面向多层培养架的草腐菌自动采摘随动无损收集装置
本技术涉及面向多层培养架的草腐菌自动采摘随动无损收集装置,属于农作物机械。
背景技术:
1、目前,草腐菌多采用工厂化生产的模式,在工厂化生产中,草腐菌采用多层培养架种植,层架较高,若采用人工采收的方式,则需要工人爬到相应培养架的高度位置进行作业,这样不但需要耗费大量的人力,还存在一定危险性。
2、目前针对机械化采摘机器人的自动采摘随动收集装置的研究较少,有采用升降式的收集方法,在这种方式下,当收集装置工作时,通过升降机构将收集篮上升到对应高度,在紧跟采摘机器人的同时开始接收传送带掉落的菌菇。当收集篮中的菌菇到达一定重量时,收集篮开始下降,到达底部时将菌菇倒出,使其落到下方的传送带,随后再上升到对应的采摘层数,进行下一轮采集。但这种方式结构相对复杂、效率较低,而且控制收集篮运动到每层培养架的位置较为复杂,不能很好的适应多层培养架收集的要求。
3、因此,有必要提供一种新型的面向多层培养架的草腐菌自动采摘随动无损收集装置,针对工厂化多层培养架结构,即可实现菌菇的自动跟随无损收集。
技术实现思路
1、针对现有技术中多层培养架的草腐菌在采摘后无损收集难度较大的问题,本实用新型提供了面向多层培养架的草腐菌自动采摘随动无损收集装置。其能够实现在工厂化生产的多层培养架的草腐菌的自动跟随无损收集的功能。
2、为了解决以上的技术问题,本实用新型采用如下技术方案。
3、本实用新型提供一种面向多层培养架的草腐菌自动采摘随动无损收集装置,其包括集料筒体、第一毛刷条、驱动轮、辅助轮、多层收集装置、随动收集检测传感器和随动控制系统;其中:
4、集料筒体上在和每层培养架高度相对应的位置开设有收集口,收集口的顶端外表面向外伸出设有第一毛刷条,第一毛刷条的外端面的高度高于收集口的顶端;
5、集料筒体的上部收集口的两侧固定安装有两个用于在多层培养架外设的培养架上导轨上前后运动的驱动轮,两个驱动轮之间通过第一同步带连接,驱动轮的运动由驱动轮驱动电机驱动,集料筒体的底部收集口的两侧固定安装有用于在多层培养架外设的培养架下导轨上前后运动的两个辅助轮。
6、集料筒体内安装有多层收集装置,多层收集装置采用链式传动升降结构,其包括两根链条、第二毛刷条、两根链轮传动轴、两对链轮、第二同步带和多层收集装置驱动电机;链轮传动轴分别设置在集料筒体的上部和底部,链轮安装在链轮传动轴上,链条安装在上下设置的链轮上,多层收集装置驱动电机通过第二同步带和同步带轮带动链轮传动轴传动进而实现两根链条的同步传动;第二毛刷条有若干个,其均匀间隔安装在两根链条形成的平面上,第二毛刷条向上倾斜设置,用于接收经过第一毛刷条掉落到集料筒体内的菌菇;
7、集料筒体的收集口上方外表面上设有用于检测采摘机器人运动位置的随动收集检测传感器;随动收集检测传感器和随动收集控制系统相连,随动收集控制系统和驱动轮驱动电机相连,随动收集控制系统通过控制驱动轮驱动电机来控制整个收集装置紧跟采摘机器人前进、后退或者停止。
8、本实用新型中,第一毛刷条和集料筒体外表面的夹角为45-60度。
9、本实用新型中,第二毛刷条和链条的夹角为45-60度。
10、本实用新型中,多层收集装置的链条上下传动所在平面和集料筒体上第一毛刷条的安装面相互平行。
11、本实用新型中,随动收集检测传感器包括间隔设置的两个分别用于接收采摘机器人信号的反射式光电传感器。
12、本实用新型中,集料筒体为一个或者两个。
13、本实用新型中,集料筒体为两个时,集料筒体的顶端通过连接件连接。
14、和现有技术相比,本实用新型的有益效果在于:
15、本实用新型提供的面向多层培养架的草腐菌自动采摘随动无损收集装置,通过毛刷条收集采摘机器人采摘的菌菇,不会对菌菇外观造成损伤。
16、本实用新型提供的面向多层培养架的草腐菌自动采摘随动无损收集装置,通过集料筒体在对应各层培养架高度位置开有收集口,结构简单、效率高,能实现多层培养架生产的菌菇收集作业。
17、本实用新型提供的面向多层培养架的草腐菌自动采摘随动无损收集装置,通过随动收集检测传感器捕捉采摘机器人的运动状态,再通过随动控制系统控制收集装置的运动,能实现对采摘机器人的实时跟随收集。
技术特征:
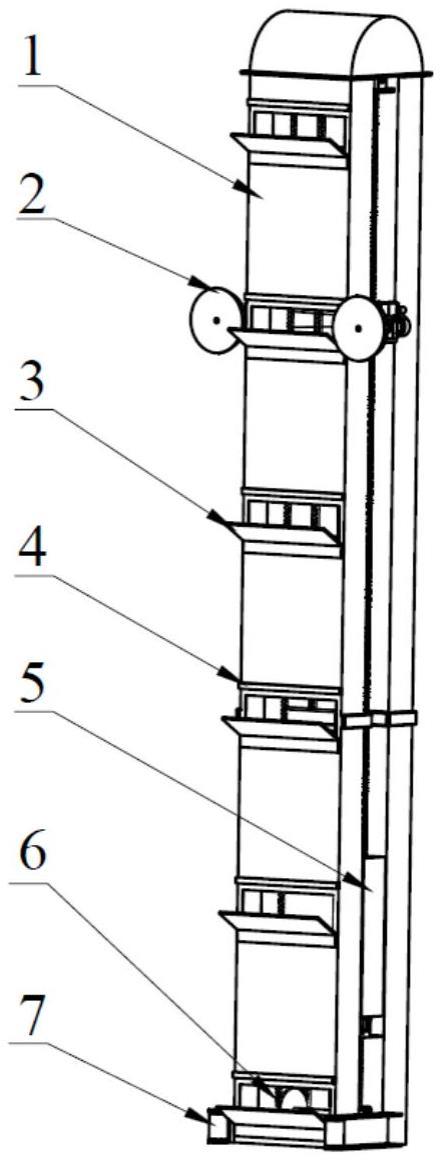
1.一种面向多层培养架的草腐菌自动采摘随动无损收集装置,其特征在于,其包括集料筒体(1)、第一毛刷条(3)、驱动轮(2)、辅助轮(7)、多层收集装置(6)、随动收集检测传感器(4)和随动控制系统;其中:
2.根据权利要求1所述的面向多层培养架的草腐菌自动采摘随动无损收集装置,其特征在于,第一毛刷条(3)和集料筒体(1)外表面的夹角为45-60度。
3.根据权利要求1所述的面向多层培养架的草腐菌自动采摘随动无损收集装置,其特征在于,第二毛刷条(602)和链条(601)的夹角为45-60度。
4.根据权利要求1所述的面向多层培养架的草腐菌自动采摘随动无损收集装置,其特征在于,多层收集装置(6)的链条(601)上下传动所在平面和集料筒体(1)上第一毛刷条(3)的安装面相互平行。
5.根据权利要求1所述的面向多层培养架的草腐菌自动采摘随动无损收集装置,其特征在于,随动收集检测传感器(4)包括间隔设置的两个分别用于接收采摘机器人信号的反射式光电传感器。
6.根据权利要求1所述的面向多层培养架的草腐菌自动采摘随动无损收集装置,其特征在于,集料筒体(1)为一个或者两个。
7.根据权利要求6所述的面向多层培养架的草腐菌自动采摘随动无损收集装置,其特征在于,集料筒体(1)为两个时,集料筒体(1)的顶端通过连接件连接。
技术总结
本技术公开了一种面向多层培养架的草腐菌自动采摘随动无损收集装置;其是配合采摘机器人的随动收集装置,其包括集料筒体、第一毛刷条、驱动轮、辅助轮、多层收集装置、随动收集检测传感器和随动控制系统;第一毛刷条固定于集料筒体的外表面,其安装位置与每一层培养架的高度对应,用于收集采摘机器人采摘的菌菇;随动控制系统通过随动收集检测传感器获取采摘机器人的状态,控制收集装置自动随动采摘机器人。本技术能够适应多层培养架的使用,并实时地紧跟采摘机器人进行菌菇的无损收集。
技术研发人员:杨淑珍,朱浩宇,俞涛
受保护的技术使用者:上海第二工业大学
技术研发日:20221221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!