绿篱避障修剪用臂架装置及修剪作业车的制作方法
本技术属于环卫设备,尤其涉及一种绿篱避障修剪用臂架装置及修剪作业车。
背景技术:
1、现有的绿篱修剪作业车在作业过程中意外撞击障碍物后,工作臂不能退让并自动执行避障动作,突发情况下需要由驾驶员及时做出合理的应对动作,对驾驶员要求极高。绿篱修剪作业车修剪作业过程中,在修剪头修剪前进方向,存在障碍物识别盲区,在盲区内无法完成自动避障动作,当遇到盲区内障碍物时,需要由驾驶员调整车辆位置或调整臂架姿态,将障碍物控制在识别区域才能完成自动避障动作。
2、现有的绿篱修剪作业车自动避障机构布置在修剪头上,采用触杆式结构实现避障,避障机构在安装后只能识别车辆单侧的障碍物,修剪头切换至车身另一侧作业时,需要将避障机构拆卸并安装至车身另一侧才能具有自动避障功能,实际操作步骤繁琐,无法达到自动双向避障的目的。
技术实现思路
1、针对现有技术的上述缺陷或不足,本实用新型提供了一种绿篱避障修剪用臂架装置及修剪作业车,旨在解决在修剪头切换车身作业侧时需要拆卸避障机构并安装至车身另一侧才能具有自动避障功能,无法达到自动双向避障功能的技术问题。
2、为了实现上述目的,本实用新型提供一种绿篱避障修剪用臂架装置,其中,包括安装座、滑移机构、工作臂机构和带储能器的伸缩驱动件,安装座用于安装于修剪作业车上,滑移机构可左右移动地安装于安装座上,工作臂机构的一端可周向转动地安装于滑移机构上,另一端用于连接修剪装置,并用于在修剪装置运动受阻的情况下进行避障转动,以使得滑移机构能够带动工作臂机构进行避障移动,伸缩驱动件安装于滑移机构上并与工作臂机构连接,并用于在工作臂机构处于避障转动状态下进行收缩储能及释放储存能量驱动工作臂机构复位。
3、在本实用新型实施例中,绿篱避障修剪用臂架装置还包括角度传感器,角度传感器用于对工作臂机构相对于滑移机构的转动角度进行检测,以能够根据检测结果控制滑移机构。
4、在本实用新型实施例中,工作臂机构包括工作臂本体、转轴和摇柄,转轴可周向转动地安装于滑移机构上,工作臂本体的一端固设于转轴上,工作臂本体的另一端用于连接修剪装置,摇柄的两端分别连接转轴以及伸缩驱动件远离滑移机构的一端,角度传感器用于对转轴相对于滑移机构的转动角度进行检测。
5、在本实用新型实施例中,摇柄的一端固定套设于转轴的端部,摇柄的另一端伸出设置有与伸缩驱动件的端部转动连接的连接销轴。
6、在本实用新型实施例中,滑移机构包括可左右移动地安装于安装座上的滑移架以及驱动滑移架在安装座上移动的驱动组件,转轴可周向转动地穿设于滑移架上,并且工作臂本体固定设于转轴伸出于滑移架的上端,摇柄远离伸缩驱动件的一端固定设于转轴伸出于滑移架的下端。
7、在本实用新型实施例中,滑移架包括可左右移动地安装于安装座上的滑移座以及设于滑移座的上部的三角架体,转轴可周向转动地穿设于三角架体朝外设置的一角上,伸缩驱动件远离摇柄的一端安装于滑移座的下部。
8、在本实用新型实施例中,滑移座包括座本体以及上下相对间隔设置在座本体上的两个滑移板,滑移板上形成有供滑移座可移动地安装于安装座上的v型滑槽。
9、在本实用新型实施例中,驱动组件包括旋转驱动件、配合条和传动轮,配合条固定安装于安装座上,传动轮设置在滑移架上并与配合条啮合,旋转驱动件设置在滑移架上并与传动轮驱动连接。
10、在本实用新型实施例中,处于正常作业状态下的工作臂机构在滑移平面的正投影与滑移机构的夹角设置为5°~20°。
11、为实现上述目的,本实用新型还提供一种修剪作业车,其中,修剪作业车包括上述的绿篱避障修剪用臂架装置。
12、通过上述技术方案,本实用新型实施例所提供的绿篱避障修剪用臂架装置具有如下的有益效果:
13、当修剪作业车使用上述绿篱避障修剪用臂架装置时,由于绿篱避障修剪用臂架装置包括安装座、滑移机构、工作臂机构和带储能器的伸缩驱动件,滑移机构可左右移动地安装于安装座上,工作臂机构的一端可周向转动地安装于滑移机构上,另一端用于连接修剪装置,伸缩驱动件安装于滑移机构上并与工作臂机构连接,当修剪装置触碰到障碍物导致其运动受阻时,工作臂机构受到障碍物的挤压而进行避障转动,伸缩驱动件由于工作臂机构的转动可实现压缩储能,且滑移机构能带动工作臂机构在安装座上做滑移运动,直至工作臂机构上的修剪装置避开障碍物,作用于工作臂机构上的阻力消失,伸缩驱动件释放压缩的能量而伸长,工作臂机构回转复位,滑移机构滑移复位,当修剪作业车更换修剪侧时,通过伸缩驱动件驱动工作臂机构和修剪装置向修剪侧偏转,伸缩驱动件和滑移机构通过重复上述工作过程即可再次对障碍物实现避障,从而达到双向自动避障的目的,相较于现有技术中采用触杆式结构实现避障,避障机构在安装后只能识别车辆单侧的障碍物,修剪头切换至车身另一侧作业时,需要将避障机构拆卸并安装至车身另一侧才能具有自动避障的功能,在本实用新型中实现了双向避障,无需对避障机构进行拆装,提高修剪作业的效率。
14、本实用新型的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种绿篱避障修剪用臂架装置,其特征在于,所述绿篱避障修剪用臂架装置包括:
2.根据权利要求1所述的绿篱避障修剪用臂架装置,其特征在于,所述绿篱避障修剪用臂架装置还包括角度传感器(203),所述角度传感器(203)用于对所述工作臂机构(102)相对于所述滑移机构(201)的转动角度进行检测,以能够根据检测结果控制所述滑移机构(201)。
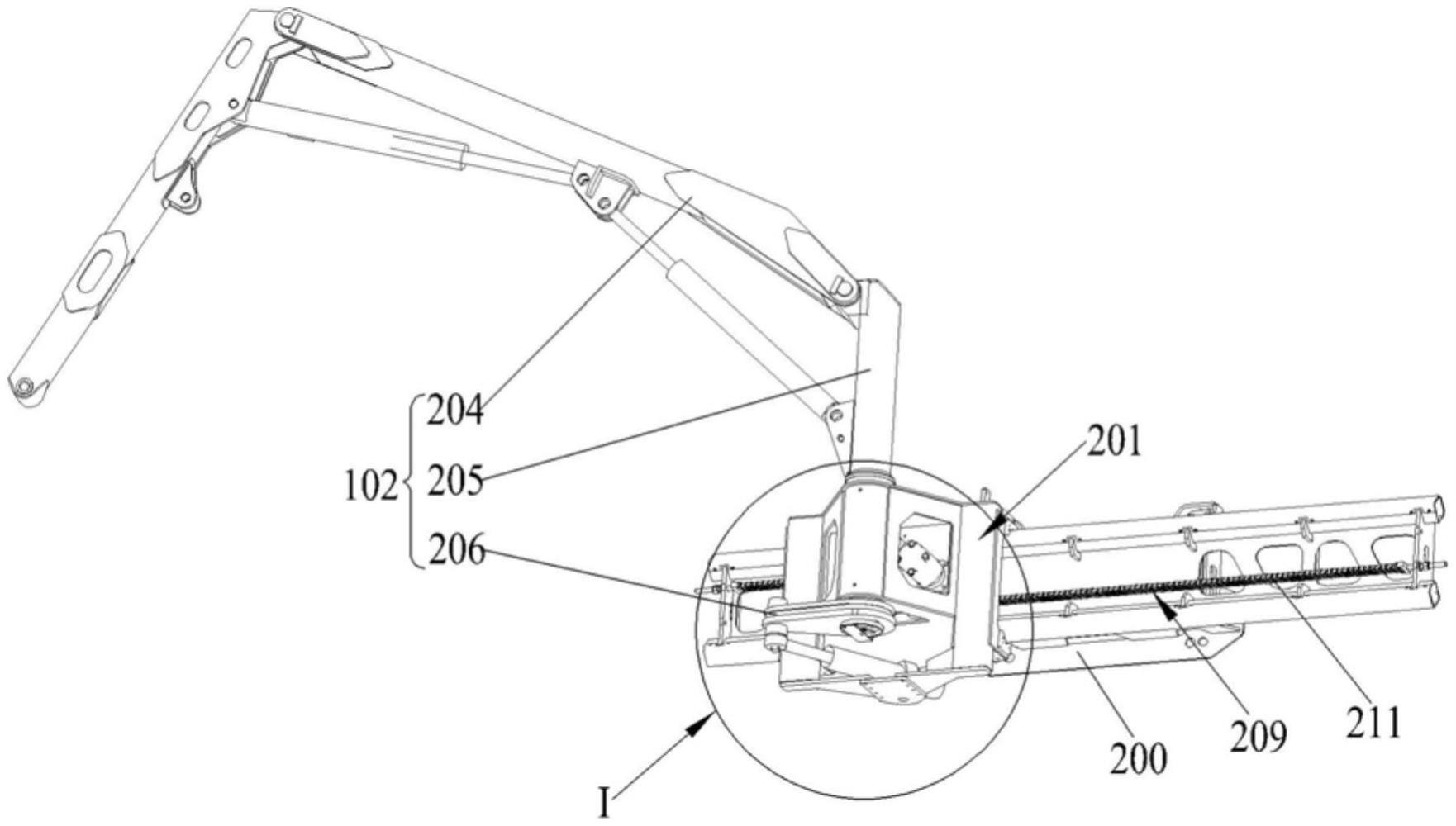
3.根据权利要求2所述的绿篱避障修剪用臂架装置,其特征在于,所述工作臂机构(102)包括工作臂本体(204)、转轴(205)和摇柄(206),所述转轴(205)可周向转动地安装于所述滑移机构(201)上,所述工作臂本体(204)的一端固设于所述转轴(205)上,所述工作臂本体(204)的另一端用于连接所述修剪装置(213),所述摇柄(206)的两端分别连接所述转轴(205)以及所述伸缩驱动件(202)远离所述滑移机构(201)的一端,所述角度传感器(203)用于对所述转轴(205)相对于所述滑移机构(201)的转动角度进行检测。
4.根据权利要求3所述的绿篱避障修剪用臂架装置,其特征在于,所述摇柄(206)的一端固定套设于所述转轴(205)的端部,所述摇柄(206)的另一端伸出设置有与所述伸缩驱动件(202)的端部转动连接的连接销轴(207)。
5.根据权利要求3所述的绿篱避障修剪用臂架装置,其特征在于,所述滑移机构(201)包括可左右移动地安装于所述安装座(200)上的滑移架(208)以及驱动所述滑移架(208)在所述安装座(200)上移动的驱动组件(209),所述转轴(205)可周向转动地穿设于所述滑移架(208)上,并且所述工作臂本体(204)固定设于所述转轴(205)伸出于所述滑移架(208)的上端,所述摇柄(206)远离所述伸缩驱动件(202)的一端固定设于所述转轴(205)伸出于所述滑移架(208)的下端。
6.根据权利要求5所述的绿篱避障修剪用臂架装置,其特征在于,所述滑移架(208)包括可左右移动地安装于所述安装座(200)上的滑移座(214)以及设于所述滑移座(214)的上部的三角架体(215),所述转轴(205)可周向转动地穿设于所述三角架体(215)朝外设置的一角上,所述伸缩驱动件(202)远离所述摇柄(206)的一端安装于滑移座(214)的下部。
7.根据权利要求6所述的绿篱避障修剪用臂架装置,其特征在于,所述滑移座(214)包括座本体(216)以及上下相对间隔设置在所述座本体(216)上的两个滑移板(217),所述滑移板(217)上形成有供所述滑移座(214)可移动地安装于所述安装座(200)上的v型滑槽(210)。
8.根据权利要求5所述的绿篱避障修剪用臂架装置,其特征在于,所述驱动组件(209)包括旋转驱动件、配合条(211)和传动轮(212),所述配合条(211)固定安装于所述安装座(200)上,所述传动轮(212)设置在所述滑移架(208)上并与所述配合条(211)啮合,所述旋转驱动件设置在所述滑移架(208)上并与所述传动轮(212)驱动连接。
9.根据权利要求1至8中任意一项所述的绿篱避障修剪用臂架装置,其特征在于,处于正常作业状态下的所述工作臂机构(102)在滑移平面的正投影与所述滑移机构(201)的夹角设置为5°~20°。
10.一种修剪作业车,其特征在于,所述修剪作业车包括根据权利要求1至9中任意一项所述的绿篱避障修剪用臂架装置。
技术总结
本技术公开了一种绿篱避障修剪用臂架装置及修剪作业车,绿篱避障修剪用臂架装置包括安装座、滑移机构、工作臂机构和带储能器的伸缩驱动件,滑移机构可左右移动地安装于安装座上,工作臂机构的一端可周向转动地安装于滑移机构上,另一端用于连接修剪装置,并用于在修剪装置运动受阻的情况下进行避障转动,以使得滑移机构能够带动工作臂机构进行避障移动,伸缩驱动件安装于滑移机构上并与工作臂机构连接,并用于在工作臂机构处于避障转动状态下进行收缩储能及释放储存能量驱动工作臂机构复位,本技术在切换修剪头的作业侧时无需对避障机构进行拆装,就能实现在修剪作业车另一侧的自动避障,提高修剪作业的效率且实现了自动双向避障。
技术研发人员:王亚祥,瞿球雄,覃先云
受保护的技术使用者:长沙中联重科环境产业有限公司
技术研发日:20221221
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!