一种人工智能玉米收获机器人的制作方法
本发明属于玉米收获机器人,具体为一种人工智能玉米收获机器人。
背景技术:
1、目前,我国对玉米的收割操作的主要方式仍为人工收割,我国玉米机械化收获率仅25%,玉米机械化收获已成为整个机械化收获的短板。但是这种人工收割的方式,不但劳动强度大,而且效率低,占用劳动力多,当然市面上也有一部分玉米收割设备,但是大多这种设备也需要人工驾驶收割设备进行操作,长时间驾驶收割设备也会使驾驶员产生疲劳,而无人驾驶技术是解决工作人员劳动强度大和驾驶环境恶劣等问题的首选方法,为此我们提出一种人工智能玉米收获机器人。
技术实现思路
1、本发明的目的在于:为了降低劳动强度,提高进行玉米收获时的工作效率,本申请提供一种人工智能玉米收获机器人。
2、本发明采用的技术方案如下:
3、一种人工智能玉米收获机器人,包括底盘总成、割台总成、输送总成、剥壳总成和柴油机,所述底盘总成包括有底盘固定梁,所述底盘固定梁的上表面固定连接有支撑架,所述支撑架的上表面中部固定连接有柴油机、发电机和控制器,所述控制器包括有单片机、wifi模块、信号接收模块、信号发射模块、数据处理模块、故障分析模块和数据存储模块,所述底盘固定梁的上表面两侧安装有行走电机,所述割台总成安装在所述支撑架的上表面右端,所述割台总成包括有进料引导架和碎草总成,所述进料引导架的数量为两个,所述碎草总成设置在两个所述进料引导架之间的所述支撑架上表面,所述碎草总成的上端外表面安装有进禾辊,所述支撑架靠近所述割台总成的右端上表面安装有所述输送总成,且所述输送总成的进料口与所述割台总成的出料口相连通,所述输送总成右端的所述支撑架上表面安装有所述剥壳总成,所述剥壳总成的进料口与所述输送总成的出料口相连通,所述剥壳总成的内侧壁安装有橡胶拔轮,所述剥壳总成的上端出料口安装有接料口,所述行走电机的上表面安装有缓冲板,所述缓冲板的上表面固定连接有接料支架,所述接料支架的上端外表面与所述接料口的下表面固定连接,所述控制器的输出端与所述割台总成、所述输送总成、所述剥壳总成和所述行走电机的输入端电性连接。
4、在一优选的发明方式中,所述底盘固定梁的两侧面固定连接有底盘桥架,所述底盘桥架的外侧面转动连接有从动轮和支撑轮,所述底盘固定梁的两侧面上端转动连接有主动轮,所述从动轮、所述主动轮和所述支撑轮的外表面设置有履带。
5、在一优选的发明方式中,所述主动轮的输入端转动轴通过从动齿轮与所述行走电机输出轴上的主动齿轮相啮合。
6、在一优选的发明方式中,所述支撑架远离所述剥壳总成的一侧上表面安装有配电箱一和配电箱二,所述发电机的上表面固定连接有配电箱三。
7、在一优选的发明方式中,所述发电机的输出端与所述配电箱一、所述配电箱二和所述配电箱三的输入端电性连接。
8、在一优选的发明方式中,所述控制器的输入端与遥控设备非电性无线连接。
9、在一优选的发明方式中,所述故障分析模块包括电源检测模块和设备检测模块。
10、综上所述,由于采用了上述技术方案,本发明的有益效果是:
11、1.本发明中,使用该玉米收获机器人进行收获时,该机器人可以启动行走电机驱动底盘总成使机器人在地面上进行移动,并靠近玉米地,此时可以通过控制控制器使机器人呈直线式移动,机器人移动时前侧的两个进料引导架会对地里的玉米杆不断向两个进料引导架的中部靠近,此时割台总成上的碎草总成会对玉米杆进行收割碎草,而进禾辊会将玉米杆上带皮玉米剔出,被剔出的带皮玉米可以从割台总成的出料口进入到输送总成中,在输送总成的输送作用下会将玉米输送到剥壳总成的输料通道中,此时橡胶拔轮可以对带皮玉米进行剥皮,被剥皮的玉米可以从接料口落入到缓冲板上,经过缓冲板的缓冲后可以落至地面,以便于工作人员收集,降低劳动强度,提高进行玉米收获时的工作效率。
12、2.本发明中,当工作人员需要对玉米收获机器人进行控制时,可以通过遥控设备发射信号给控制器,当控制器的信号接收模块接收到信号后,工作人员可以在遥控设备上进行操作,控制控制器使行走电机驱动玉米收获机器人在地面上进行移动;同时当玉米收获机器人发生故障时,故障分析模块会的电源检测模块会对电源以及柴油机和发电机进行检测,而设备检测模块会对底盘总成、割台总成、输送总成、剥壳总成和行走电机进行检测,并将检测数据通过信号发射模块反馈给遥控设备,便于工作人员进行及时维修和调整,节省时间,提高进行玉米收获时的工作效率。
技术特征:
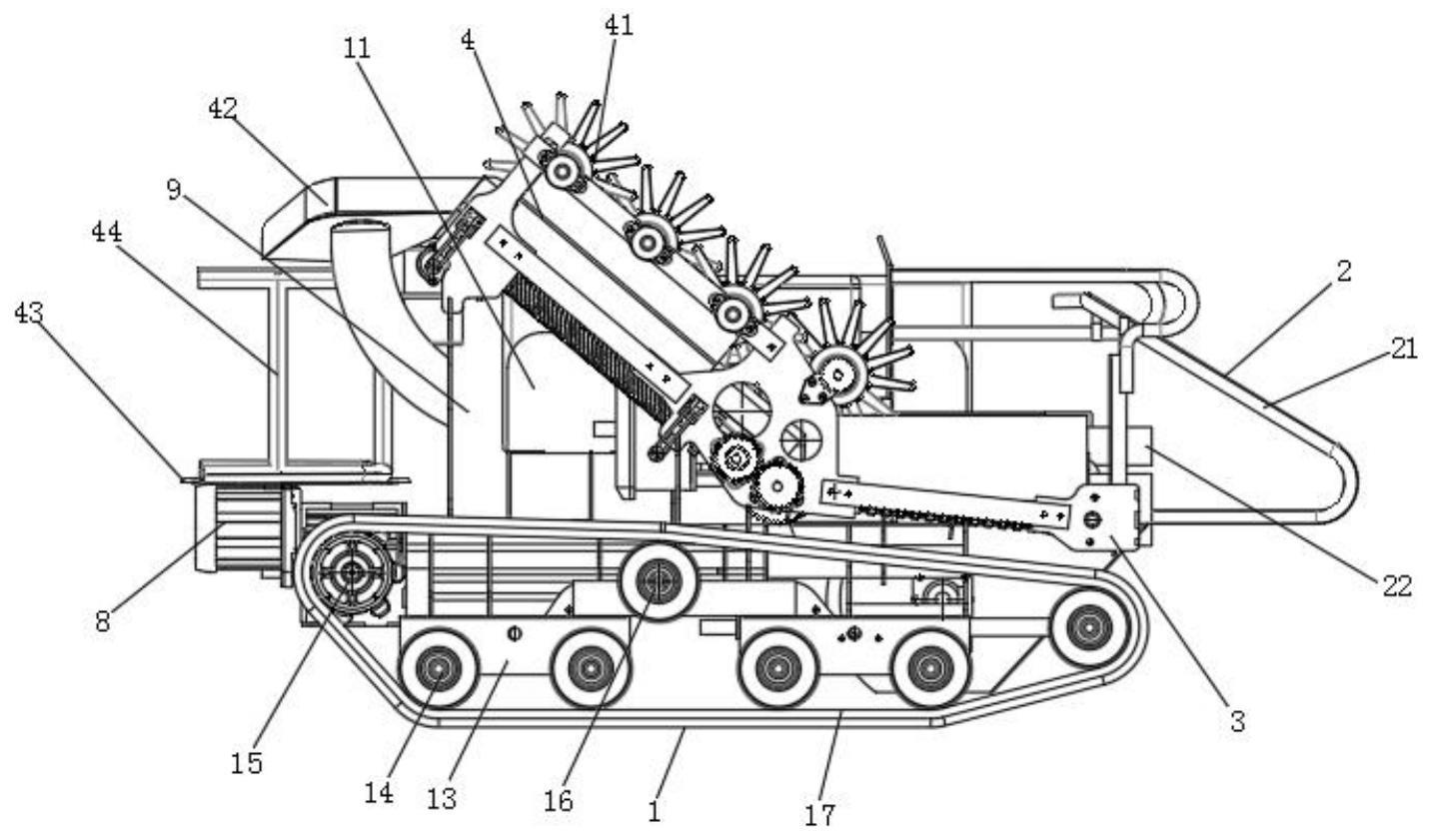
1.一种人工智能玉米收获机器人,包括底盘总成(1)、割台总成(2)、输送总成(3)、剥壳总成(4)和柴油机(9),其特征在于:所述底盘总成(1)包括有底盘固定梁(18),所述底盘固定梁(18)的上表面固定连接有支撑架(12),所述支撑架(12)的上表面中部固定连接有柴油机(9)、发电机(10)和控制器(11),所述底盘固定梁(18)包括有单片机、wifi模块、信号接收模块、信号发射模块、数据处理模块、故障分析模块和数据存储模块,所述控制器(11)的上表面两侧安装有行走电机(8),所述割台总成(2)安装在所述支撑架(12)的上表面右端,所述割台总成(2)包括有进料引导架(21)和碎草总成(23),所述进料引导架(21)的数量为两个,所述碎草总成(23)设置在两个所述进料引导架(21)之间的所述支撑架(12)上表面,所述碎草总成(23)的上端外表面安装有进禾辊(22),所述支撑架(12)靠近所述割台总成(2)的右端上表面安装有所述输送总成(3),且所述输送总成(3)的进料口与所述割台总成(2)的出料口相连通,所述输送总成(3)右端的所述支撑架(12)上表面安装有所述剥壳总成(4),所述剥壳总成(4)的进料口与所述输送总成(3)的出料口相连通,所述剥壳总成(4)的内侧壁安装有橡胶拔轮(41),所述剥壳总成(4)的上端出料口安装有接料口(42),所述行走电机(8)的上表面安装有缓冲板(43),所述缓冲板(43)的上表面固定连接有接料支架(44),所述接料支架(44)的上端外表面与所述接料口(42)的下表面固定连接,所述控制器(11)的输出端与所述割台总成(2)、所述输送总成(3)、所述剥壳总成(4)和所述行走电机(8)的输入端电性连接。
2.如权利要求1所述的一种人工智能玉米收获机器人,其特征在于:所述底盘固定梁(18)的两侧面固定连接有底盘桥架(13),所述底盘桥架(13)的外侧面转动连接有从动轮(14)和支撑轮(16),所述底盘固定梁(18)的两侧面上端转动连接有主动轮(15),所述从动轮(14)、所述主动轮(15)和所述支撑轮(16)的外表面设置有履带(17)。
3.如权利要求2所述的一种人工智能玉米收获机器人,其特征在于:所述主动轮(15)的输入端转动轴通过从动齿轮与所述行走电机(8)输出轴上的主动齿轮相啮合。
4.如权利要求1所述的一种人工智能玉米收获机器人,其特征在于:所述支撑架(12)远离所述剥壳总成(4)的一侧上表面安装有配电箱一(5)和配电箱二(6),所述发电机(10)的上表面固定连接有配电箱三(7)。
5.如权利要求1所述的一种人工智能玉米收获机器人,其特征在于:所述发电机(10)的输出端与所述配电箱一(5)、所述配电箱二(6)和所述配电箱三(7)的输入端电性连接。
6.如权利要求1所述的一种人工智能玉米收获机器人,其特征在于:所述控制器(11)的输入端与遥控设备非电性无线连接。
7.如权利要求1所述的一种人工智能玉米收获机器人,其特征在于:所述故障分析模块包括电源检测模块和设备检测模块。
技术总结
本发明涉及玉米收获机器人技术领域,公开了一种人工智能玉米收获机器人,本发明中包括底盘总成、割台总成、输送总成、剥壳总成、柴油机、固定梁、支撑架、柴油机、发电机、控制器、单片机、WiFi模块、信号接收模块、信号发射模块、数据处理模块、故障分析模块、数据存储模块、行走电机、进料引导架、碎草总成、进禾辊和输送总成,输送总成右端的支撑架上表面安装有剥壳总成,剥壳总成的内侧壁安装有橡胶拔轮,剥壳总成的上端出料口安装有接料口,行走电机的上表面安装有缓冲板,缓冲板的上表面固定连接有接料支架;通过以上结构的配合可以降低劳动强度,提高进行玉米收获时的工作效率。
技术研发人员:辜晓林,王毓民,刘树霖,辜彬慧,赵彬蔚
受保护的技术使用者:绵阳市朝育机械有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!