区域设定方法、作业车辆以及自动行驶系统与流程
本发明涉及对田地中的供作业车辆进行自动行驶的区域进行设定的区域设定方法、作业车辆以及自动行驶系统。
背景技术:
1、以往,联合收割机等作业车辆往往在田地中的规定的区域内制作自动行驶路径,从而能够执行一边沿着自动行驶路径进行自动行驶一边进行收割作业的自动收割行驶。另外,为了制作自动行驶路径,作业车辆需要掌握田地的外形,并且需要掌握田地的内侧的能够制作自动行驶路径的区域(可制作区域)。
2、例如,在专利文献1中,公开了使用行驶速度控制装置的自动行驶系统,自动行驶系统应用拖拉机作为作业车辆,具备自动行驶单元以及移动通信终端。移动通信终端具备具有各种控制程序等的终端电子控制单元,终端电子控制单元具有对用于供拖拉机在行驶区域内进行规定的作业的作业区域进行设定的作业区域设定部、和对目标行驶路径进行设定的行驶路径设定部。由作业区域设定部设定的作业区域成为一边使拖拉机进行自动行驶一边进行规定的作业的区域。作业区域设定部以在行驶区域的外周部的内侧确保所要求的空间量的状态,在行驶区域的内侧设定作业区域。
3、专利文献1:日本特开2021-176094号公报
4、在将专利文献1的作业区域应用于从田地的外周进行作业的联合收割机等作业车辆的情况下,需要沿着田地(行驶区域)的外周,以到达可制作区域(作业区域)为目标而进行手动收割行驶等作业行驶,在残留于可制作区域内的未作业地制作自动行驶路径。然后,联合收割机在可制作区域内沿着自动行驶路径进行自动收割行驶。然而,在联合收割机在成为目标的可制作区域的周围进行手动收割行驶时,存在无法沿着可制作区域的外周进行行驶的情况,从而存在未作业地从可制作区域露出并残留的情况。若以这种状态对可制作区域进行自动收割行驶,则会产生收割残留,换言之,会产生作业的残留区域。
技术实现思路
1、本发明的目的在于,提供能够以不产生作业的残留区域的方式设定可制作区域的区域设定方法、作业车辆以及自动行驶系统。
2、为了解决上述课题,本发明的区域设定方法设定田地中的供作业车辆进行自动行驶的区域,该区域设定方法的特征在于,具有:外形设定工序,在该工序中,对田地外形进行设定;可制作区域设定工序,在该工序中,对设置于上述田地外形的内侧且可制作自动行驶路径的可制作区域进行设定;以及范围变更工序,在该工序中,对上述可制作区域的范围进行变更。
3、另外,为了解决上述课题,本发明的作业车辆在田地中进行自动行驶,该作业车辆的特征在于,具备:外形设定部,上述外形设定部对田地外形进行设定;可制作区域设定部,上述可制作区域设定部对设置于上述田地外形的内侧且可制作自动行驶路径的可制作区域进行设定;以及范围变更部,上述范围变更部对上述可制作区域的范围进行变更。
4、另外,为了解决上述课题,本发明的自动行驶系统使作业车辆在田地中进行自动行驶,该自动行驶系统的特征在于,具备:外形设定部,上述外形设定部对田地外形进行设定;可制作区域设定部,上述可制作区域设定部对设置于上述田地外形的内侧且可制作自动行驶路径的可制作区域进行设定;以及范围变更部,上述范围变更部对上述可制作区域的范围进行变更。
5、根据本发明,提供能够以不产生作业的残留区域的方式设定可制作区域的区域设定方法、作业车辆以及自动行驶系统。
技术特征:
1.一种区域设定方法,其设定田地中的供作业车辆进行自动行驶的区域,
2.根据权利要求1所述的区域设定方法,其特征在于,具有:
3.根据权利要求2所述的区域设定方法,其特征在于,
4.根据权利要求2或3所述的区域设定方法,其特征在于,
5.根据权利要求3或4所述的区域设定方法,其特征在于,
6.根据权利要求1或2所述的区域设定方法,其特征在于,
7.根据权利要求1或2所述的区域设定方法,其特征在于,
8.根据权利要求1~7中任一项所述的区域设定方法,其特征在于,具有:
9.根据权利要求1~8中任一项所述的区域设定方法,其特征在于,具有:
10.一种作业车辆,其在田地中进行自动行驶,
11.一种自动行驶系统,其使作业车辆在田地中进行自动行驶,
技术总结
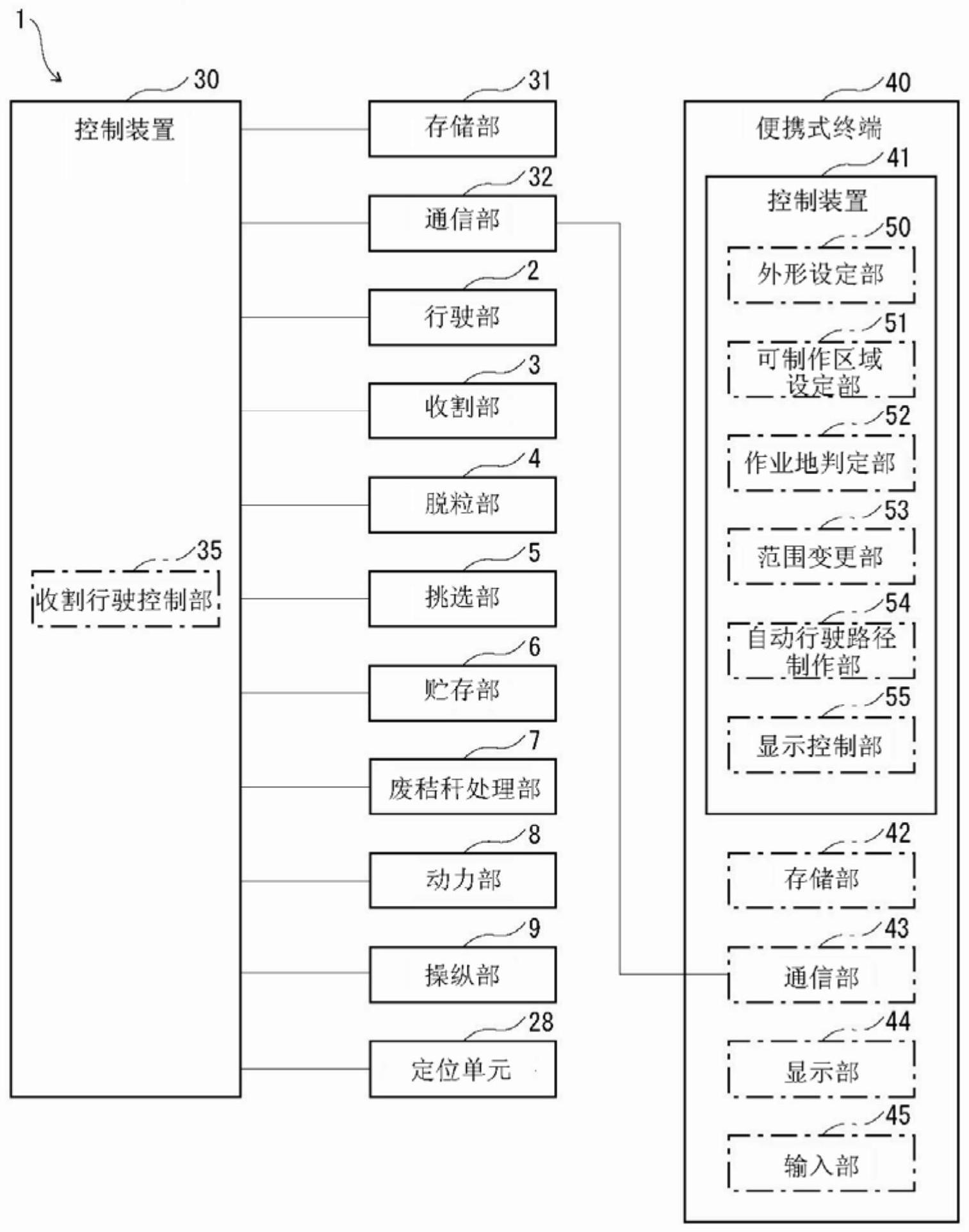
本发明提供区域设定方法、作业车辆以及自动行驶系统,能够以不产生作业的残留区域的方式设定可制作区域。联合收割机(1)等作业车辆具备便携式终端(40),便携式终端(40)具备控制装置(41)。控制装置(41)作为对田地外形(60)进行设定的外形设定部(50)、对设置于田地外形(60)的内侧且能够制作自动行驶路径(64)的可制作区域(63)进行设定的可制作区域设定部(51)以及对可制作区域(63)的范围进行变更的范围变更部(53)发挥功能。
技术研发人员:铃木秀崇,村山昌章,山口雄司,西井康人
受保护的技术使用者:洋马控股株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!