一种果园割草机器人
本发明涉及割草设备,具体涉及一种果园割草机器人。
背景技术:
1、我国是水果种植大国,但是果树生长过程中,杂草等其他植物的生长抢夺本应该是果树生长需要的养分,使得果树的生长受到极大的限制,故需要对杂草进行清除。
2、现有技术存在以下不足:现有技术中,通常是选择人工除草,不过南方果树一般偏低,且坡地起伏不平,果树经常是种植在有一定斜度的坡面上,对果树进行周向除草时极为不便,导致劳动强度较大并且效率较低。
技术实现思路
1、本发明所要解决的技术问题是针对上述现有技术的不足,提供一种果园割草机器人。
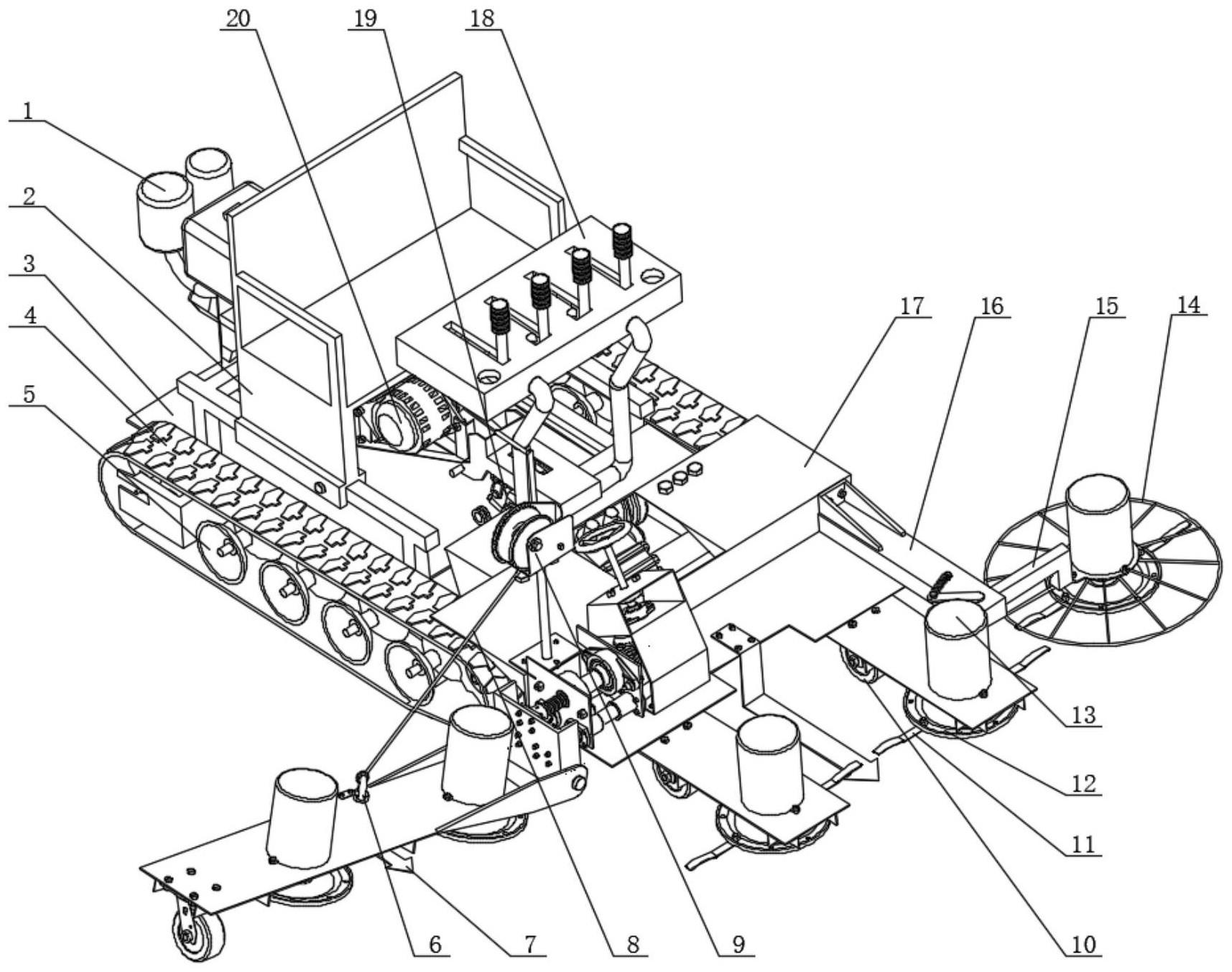
2、本发明所采用的技术方案是:包括底盘,所述底盘的顶部设置有操作台,所述底盘的前侧通过螺栓固定设置有前置安装架,所述前置安装架的前侧设置有固定割草机构,固定割草机构用于在底盘移动时,将位于前置安装架前方的杂草割除,所述前置安装架的一侧设置有调节割草机构,调节割草机构用于在底盘移动时,调节倾斜与底盘一侧的坡面倾斜相等后,割除位于坡面上的杂草,所述所述前置安装架远离调节割草机构的一侧还设置有避障割草机构,在所述底盘移动移动过程中遇到障碍物时,避障割草机构向前置安装架移动进行避障处理,避障后,避障割草机构自动复位。
3、在一个优选的实施方式中,所述底盘上固定有柴油发动机、变速箱、发电机以及座椅,所述的座椅固定在底盘顶部,所述的底盘两侧为行进履带,行进履带通过驱动轴与固定在底盘上的变速箱体传动连接,由绕过柴油发动机自带皮带轮的皮带带动变速箱运行,从而带动与所述变速箱同轴的固定在行进履带内侧的驱动轮转动,进一步的带动行进履带的行进,使得底盘可以移动.
4、在一个优选的实施方式中,所述固定割草机构、调节割草机构以及避障割草机构均包括有割刀、刀盘以及步进电机,且割刀通过固定轴固定在刀盘的底部,刀盘与步进电机通过输出轴传动连接。
5、在一个优选的实施方式中,所述固定割草机构还包括第一支架,且步进电机固定在第一支架的顶部,刀盘通过转轴转动设置在第一支架的底部,前置安装架通过第一支架带动割刀移动,步进电机通过刀盘驱动割刀旋转,切割位于前置安装架前方的杂草。
6、在一个优选的实施方式中,所述调节割草机构还包括第二支架以及调节组件,步进电机固定在第二支架的顶部,刀盘通过转轴转动设置在第二支架的底部,调节组件包括调节板、丝杆、导杆、锥齿轮组、手轮、吊环、绳索以及手摇绞盘;
7、在一个优选的实施方式中,且第二支架的一端与调节板通过铰链转动连接,调节板与丝杆螺纹连接,且调节板与前置安装架通过导杆滑动连接,锥齿轮组设置在丝杆的一端,且锥齿轮组与手轮通过锥齿轮组传动连接,顺时针转动手轮、手轮通过锥齿轮组带动丝杆逆时针转动,丝杆通过调节板带动第二支架移动远离前置安装架,逆时针转动手轮、手轮通过锥齿轮组带动丝杆顺时针转动,丝杆通过调节板带动第二支架移动靠近前置安装架;
8、在一个优选的实施方式中,吊环固定在第二支架的中侧顶部,手摇绞盘通过支撑杆固定在前置安装架的顶部,绳索的一端与手摇绞盘固定,另一端与吊环固定,顺时针转动手摇绞盘,手摇绞盘收卷绳索,绳索通过吊环拉动第二支架向上倾斜,逆时针转动手摇绞盘,手摇绞盘松开绳索,第二支架在重力作用下向下倾斜;
9、在一个优选的实施方式中,在进行有一定斜度的坡面割草时候首先由绕过手摇绞盘的绳索拉起第二支架上的吊环,进一步的使得整个第二支架倾斜一定的角度,但是有的侧面起伏不定,有着凸起或者凹下,为了适应这种情况则需要转动手轮从而使得锥齿轮组转动带动丝杆外伸(内推)调节板与第二支架,防止在进行侧坡面割草时候割刀撞到泥土损坏割刀。
10、在一个优选的实施方式中,所述第一支架以及第二支架的底部均设置有万向轮,万向轮用于辅助支撑第一支架以及第二支架;
11、在一个优选的实施方式中,所述第一支架以及第二支架的中部均固定设置有分禾器,分禾器用于防止未经分行的杂草将第一支架以及第二支架堵塞,使杂草更容易被切割。
12、在一个优选的实施方式中,所述避障割草机构还包括刀架保护罩、摆臂、悬臂以及拉簧,所述悬臂的一端与前置安装架通过螺栓固定连接,摆臂的一端与悬臂的另一端通过转杆转动连接,转杆的顶端延伸至悬臂的顶部,且转杆的顶端固定设置有连杆,连杆与悬臂通过拉簧连接,刀架保护罩固定在刀盘的顶部,在无障碍物干扰时,沿着既定的行进路线割草,当行进割草时碰到障碍物会挤压刀架保护罩从而推动摆臂带动拉簧拉伸,使刀架保护罩靠近前置安装架达到避障效果,当离开障碍物时,由拉簧自身恢复形变重新弹回使刀盘按照原先的轨道割草。
13、相比于现有技术,本发明的有益效果为:
14、本发明在机器启动进行割草作业时,遇到侧坡面不规则,存在较大凹坑或者突起部分,调节割草机构可以根据地形调整坡面机架的外伸距离以及坡面机架的倾斜角来适应一定程度的不规则侧坡面,同时固定割草机构前进方向向左设置有避障割草机构,在底盘移动移动过程中遇到障碍物时,避障割草机构向前置安装架移动进行避障处理,避障后,避障割草机构自动复位,该割草机器人集割草、调节、避障等功能为一体,不仅割草效率高,而且能够适用于复杂地形割草。
技术特征:
1.一种果园割草机器人,包括底盘(3),所述底盘(3)的顶部设置有操作台(18),所述底盘(3)的前侧通过螺栓固定设置有前置安装架(17),其特征在于:所述前置安装架(17)的前侧设置有固定割草机构,固定割草机构用于在底盘(3)移动时,将位于前置安装架(17)前方的杂草割除,所述前置安装架(17)的一侧设置有调节割草机构,调节割草机构用于在底盘(3)移动时,调节倾斜与底盘(3)一侧的坡面倾斜相等后,割除位于坡面上的杂草,所述所述前置安装架(17)远离调节割草机构的一侧还设置有避障割草机构,在所述底盘(3)移动移动过程中遇到障碍物时,避障割草机构向前置安装架(17)移动进行避障处理,避障后,避障割草机构自动复位。
2.根据权利要求1所述的一种果园割草机器人,其特征在于:所述固定割草机构、调节割草机构以及避障割草机构均包括有割刀(11)、刀盘(12)以及步进电机(13),且割刀(11)通过固定轴固定在刀盘(12)的底部,刀盘(12)与步进电机(13)通过输出轴传动连接。
3.根据权利要求2所述的一种果园割草机器人,其特征在于:所述固定割草机构还包括第一支架,且步进电机(13)固定在第一支架的顶部,刀盘(12)通过转轴转动设置在第一支架的底部,前置安装架(17)通过第一支架带动割刀(11)移动,步进电机(13)通过刀盘(12)驱动割刀(11)旋转,切割位于前置安装架(17)前方的杂草。
4.根据权利要求3所述的一种果园割草机器人,其特征在于:所述调节割草机构还包括第二支架以及调节组件,步进电机(13)固定在第二支架的顶部,刀盘(12)通过转轴转动设置在第二支架的底部,调节组件包括调节板、丝杆(22)、导杆(23)、锥齿轮组(24)、手轮(25)、吊环(6)、绳索(8)以及手摇绞盘(9)。
5.根据权利要求4所述的一种果园割草机器人,其特征在于:所述第二支架的一端与调节板通过铰链转动连接,调节板与丝杆(22)螺纹连接,且调节板与前置安装架(17)通过导杆(23)滑动连接,锥齿轮组(24)设置在丝杆(22)的一端,且锥齿轮组(24)与手轮(25)通过锥齿轮组(24)传动连接,顺时针转动手轮(25)、手轮(25)通过锥齿轮组(24)带动丝杆(22)逆时针转动,丝杆(22)通过调节板带动第二支架移动远离前置安装架(17),逆时针转动手轮(25)、手轮(25)通过锥齿轮组(24)带动丝杆(22)顺时针转动,丝杆(22)通过调节板带动第二支架移动靠近前置安装架(17)。
6.根据权利要求5所述的一种果园割草机器人,其特征在于:所述吊环(6)固定在第二支架的中侧顶部,手摇绞盘(9)通过支撑杆固定在前置安装架(17)的顶部,绳索(8)的一端与手摇绞盘(9)固定,另一端与吊环(6)固定,顺时针转动手摇绞盘(9),手摇绞盘(9)收卷绳索(8),绳索(8)通过吊环(6)拉动第二支架向上倾斜,逆时针转动手摇绞盘(9),手摇绞盘(9)松开绳索(8),第二支架在重力作用下向下倾斜。
7.根据权利要求6所述的一种果园割草机器人,其特征在于:所述第一支架以及第二支架的中部均固定设置有分禾器(7),分禾器(7)用于防止未经分行的杂草将第一支架以及第二支架堵塞。
8.根据权利要求2-7任一项所述的一种果园割草机器人,其特征在于:所述避障割草机构还包括刀架保护罩(14)、摆臂(15)、悬臂(16)以及拉簧(21),所述悬臂(16)的一端与前置安装架(17)通过螺栓固定连接,摆臂(15)的一端与悬臂(16)的另一端通过转杆转动连接,转杆的顶端延伸至悬臂(16)的顶部,且转杆的顶端固定设置有连杆,连杆与悬臂(16)通过拉簧(21)连接,刀架保护罩(14)固定在刀盘(12)的顶部。
技术总结
本发明涉及一种果园割草机器人,包括底盘,所述底盘的顶部设置有操作台,所述底盘的前侧通过螺栓固定设置有前置安装架,所述前置安装架的前侧设置有固定割草机构,固定割草机构用于在底盘移动时,将位于前置安装架前方的杂草割除,所述前置安装架的一侧设置有调节割草机构,所述所述前置安装架远离调节割草机构的一侧还设置有避障割草机构。本发明调节割草机构可以根据地形调整坡面机架的外伸距离以及坡面机架的倾斜角来适应一定程度的不规则侧坡面,同时固定割草机构前进方向向左设置有避障割草机构,在底盘移动移动过程中遇到障碍物时,避障割草机构向前置安装架移动进行避障处理,避障后,避障割草机构自动复位。
技术研发人员:黄兴元,潘冰冰,马林
受保护的技术使用者:南昌大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!